Playstation Servomotor Controller Interface
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Police Crime Bulletin
PPoolliiccee CCrriimmee BBuulllleettiinn Crime Prevention Bureau 26000 Evergreen Road, Southfield, Michigan (248) 796-5500 July 12, 2021 – July 18, 2021 Chief of Police Elvin Barren Prepared by Mark Malott Neighborhood Watch Coordinator 248-796-5415 Commercial Burglaries: Date/Time Address (block range) Method of Entry Description/Suspect Information 07/12/2021 29000 Telegraph Rd. Bricks were used Officers were dispatched to Car Dealership for B&E of 8:52am (Car Dealership) to breach the w/s both the New Car & Used Car sales showrooms. windows on entry Surveillance Video shows perps had breached both >>>>>>>>>>>>>>>> doors to both the west side entry doors of New & Used Car Sales using (Both the New & used and new car pieces of brick and mortar. Used Car salesrooms. Both perps are described as follows: Thin build, Salesrooms were average height, wearing purple hooded wind breakers, broken into. dark clothing & white tennis shoes. Both perps 2- Vehicles and appeared to be wearing black rubber gloves. The 3- sets of keys for windbreakers appear to have a logo over the left other vehicles were breast area. Suspects forced entry at 4:06am and fled taken.) the business at 4:08am. >>>>>>>>>>>>>>> It is believed that suspects then entered used car sales by breaching the door in the same fashion and located several unsecure locations within the business where car keys are hung up. Suspects then exited with a key and fob for a 2016 Jeep Cherokee, white in color and fled in unknown direction. Vehicle was entered as stolen. It was later discovered that a second vehicle had been stolen & 3 sets of keys for other vehicles were missing. -

DALGLEISH Revised
There are no universal interfaces: how asymmetrical roles and asymmetrical controllers can increase access diversity Mat Dalgleish Abstract Many people with a disability play games despite difficulties in relation to access or quality of experience. Better access is needed, but there has been limited industry interest. For players with motor impairments the focus has been on the controller. Numerous solutions have been developed by third parties, but all are likely unsuitable for at least some users and there remains space for radically alternative angles. Informed by my experiences as a disabled gamer, concepts of affordance and control dimensionality are used to discuss the accessibility implications of controller design from the Magnavox Odyssey to the present. Notions of incidental body-controller fit and precarious accessibility are outlined. I subsequently draw on Lévy’s theory of collective intelligence and example games Keep Talking and Nobody Explodes and Artemis Spaceship Bridge Commander to develop a model that uses asymmetrical roles and diverse input to fit individual abilities and thereby expand participation. Keywords: disability; controllers; asymmetrical roles; motor impairment; control dimensionality Introduction The barriers faced by people with disabilities are often considered in terms of two theoretical models: the medical model and the social model. The medical model of disability locates disability in the mind or body of the individual “patient” and emphasises linear restoration to “normality” (Gough, 2005). This was contested (UPIAS, 1976, pp. 3-4; Locker, 1983, p. 90) and there followed a shift to a social model of disability that posited that people are disabled by the attitudes of society (Shakespeare, 2016). -

Sce Announces New Controller for Playstation®3(Pdf)
SCE ANNOUNCES NEW CONTROLLER FOR PLAYSTATION®3 Equipped with High-Precision, Highly Sensitive Six-Axis Sensing System Los Angeles, May 8, 2006 – Sony Computer Entertainment Inc. (SCEI) today announced the new controller for PLAYSTATION®3 (PS3), which will become available as standard with the system. The new controller can be experienced at the Electronic Entertainment Expo (E3) held from May 10 through 12, 2006, in Los Angeles, California. The controller for PS3 has been created by refining and improving the world’s most popular PlayStation® controller that has shipped more than several hundred million units worldwide, while inheriting its basic concept and design. The controller for PS3 employs breakthrough technology of high-precision, highly sensitive six-axis sensing system that does not require any devices other than the controller itself for seamless interactive operation, thus eliminating additional settings to TVs. With this technology, ways to enjoy PS3 will be further enhanced by accessing PS3 through the network, while retaining the six-axis sensing capability. In addition to the “3-posture-axis” of roll, pitch and yaw, “3-dimension acceleration information (X, Y, and Z)” can be detected in high-precision and in real-time. In addition to standard key input available in existing controllers, more natural and more intuitive play will become possible as if the controller has become part of your body. Pursuant to the introduction of this new six-axis sensing system, the vibration feature that is currently available on DUALSHOCK® and DUALSHOCK®2 controllers for PlayStation and PlayStation®2, will be removed from the new PS3 controller as vibration - more - 1/2 2-2-2-2 SCE Announces New Controller for PLAYSTATION 3 itself interferes with information detected by the sensor. -
Using a Playstation 2 Controller with Your Arduino Project
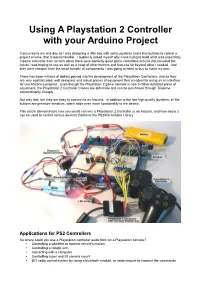
Using A Playstation 2 Controller with your Arduino Project It occurred to me one day as I was designing a little box with some joysticks and a few buttons to control a project of mine, that it looked familiar. I suddenly asked myself why I was trying to build what was essentially a game controller from scratch when there were perfectly good game controllers around that included the inputs I was hoping to use as well as a heap of other buttons and features far beyond what I needed. And they were cheaper than the small handful of components I was going to need to buy to make my own. There has been millions of dollars poured into the development of the Playstation Controllers, and so they are very sophisticated, well designed, and robust pieces of equipment that are ideal for using as an interface for mechatronics projects. Even though the Playstation 2 game console is now a rather outdated piece of equipment, the Playstation 2 Controller Clones are still made and can be purchased through Trademe extraordinarily cheaply. Not only that, but they are easy to connect to an Arduino. In addition to the two high quality joysticks, all the buttons are pressure sensitive, which adds even more functionality to the device. This article demonstrates how you would connect a Playstation 2 Controller to an Arduino, and how easily it can be used to control various devices thanks to the PS2Xlib Arduino Library. Applications for PS2 Controllers So where could you use a Playstation controller aside from on a Playstation console? • Controlling a wheeled or tracked vehicle's motion. -

Gaming Consoles.Pdf
G A M I N G C O N S O L E S INTRODUCTION Gaming consoles have proved themselves to be the best in digital entertainment. Gaming consoles were designed for the sole purpose of playing electronic games and nothing else. A gaming console is a highly specialised piece of hardware that has rapidly evolved since its inception incorporating all the latest advancements in processor technology, memory, graphics, and sound among others to give the gamer the ultimate gaming experience. DEFINITION A gaming console is a system that is exclusively dedicated for gaming. It has been optimized for game playing as that is its core function. One can play games on a PC or even a cellphone but these are not systems dedicated for gaming, so they cannot be termed gaming consoles. A BRIEF HISTORY OF VIDEO GAME CONSOLES Video games have been around since the early 1970s. The first commercial arcade video game, Computer Space by Nutting Associates, was introduced in 1971. In 1972, Atari introduced Pong to the arcades. An interesting item to note is that Atari was formed by Nolan Bushnell, the man who developed Computer Space. He left Nutting Associates to found Atari, which then produced Pong, the first truly successful commercial arcade video game. 1 T E T 2600 Alt g t Fairchil Channel F, released in 1976, was the first true removable game system, Atari once again had the first such system to be a commercial success. Introduced in 1977 as the Atari Video Computer System (VCS), the 2600 used removable cartridges, allowing a multitude of games to be played using the same hardware. -

Usage of Today's Technology in Creating Authentic '8-Bit' and '1
CALIFORNIA STATE UNIVERSITY, NORTHRIDGE Renegade Drive: Usage of Today’s Technology in Creating Authentic ‘8-bit’ and ‘16-bit’ Video Game Experiences A thesis submitted in partial fulfillment of the requirements For the degree of Master of Science in Computer Science By Christian Guillermo Bowles December 2017 Copyright by Christian Guillermo Bowles 2017 ii The thesis of Christian Guillermo Bowles is approved: ______________________________ ____________ Prof. Caleb Owens Date ______________________________ ____________ Dr. Robert McIlhenny Date ______________________________ ____________ Dr. Li Liu, Chair Date California State University, Northridge iii Acknowledgements The author wishes to thank the following individuals and organizations for their contributions and support towards this thesis project: • Doris Chaney • Dr. G. Michael Barnes • Dr. Richard Covington • Dr. Peter Gabrovsky • Dr. Ani Nahapetian • Lauren X. Pham • Chase Bethea • Caleb Andrews • Sean Velasco • Ian Flood • Nick Wozniak • David D’Angelo • Shannon Hatakeda • Jake Kaufman • CSUN Game Development Club • Animation Student League of Northridge • CSUN Anime Club • Yacht Club Games • Mint Potion TV iv Table of Contents Signature Page iii Acknowledgements iv List of Figures x List of Tables xiv Abstract xv Introduction 1 Chapter 1: Hardware Limitations of the Nintendo Entertainment System 3 • Screen Resolution 3 • Tile Patterns 4 • Layers 4 • Sprites 6 • Palettes 7 • Audio 8 • Input 10 Chapter 2: Hardware Limitations of the Sega Master System 12 • Screen Resolution 12 -

Making a Wireless Controller Final Project Design Report
Department of Electrical and Computer Engineering 332:428 Capstone Design - Communications Systems Spring 2014 Making a Wireless Controller Final Project Design Report Group Members: Hector Ramos Project Director: Dr. David G. Daut May 14, 2014 Table of Contents Abstract Page 3 i. Design Project Overview Page 3 ii. Technical Specifications Page 4 iii. Final Project Summary a. System Design – Final Version Page 5 b. System Implementation Page 8 c. System Performance Page 10 d. System Design Iterations Page 12 iv. Task List Page 16 v. Design Project Details a. PlayStation 2 Hardwired Sub-system i. Theoretical Considerations Page 17 ii. Design Procedure Page 19 iii. Observed and Measured Results Page 20 b. 900 MHz Transceiver Sub-system i. Theoretical Considerations Page 22 ii. Design Procedure Page 23 iii. Observed and Measured Results Page 25 vi. Sub-system Integration Considerations Page 30 vii. Economic Considerations a. Cost Analysis – Prototype Page 31 b. Cost analysis – Final Version Page 31 viii. Manufacturability Page 32 ix. Marketability Page 32 x. Individual Team Member Discussions a. Overview Discussion of the Project Page 33 b. Detailed Discussion of Pertinent Sub-systems Page 34 xi. Conclusion Page 35 xii. References Page 36 xiii. Appendices a. Appendix 1: List of Equipment b. Appendix 2: Simulations and Program Code c. Appendix 3: Datasheets 2 | P a g e Abstract: In this capstone design project, a PlayStation 2 wired controller is attempted to be made wireless via a controller hub for the system transmitting the data on RF channels wirelessly to the PlayStation 2 console. The controller data lines are observed and measured, and a FDD RF system is proposed. -
Modded Controller Buying Guide
megamodz.com MODDED CONTROLLER BUYING GUIDE TOPICS IN THIS If you are in the market for a modded controller for the gaming MODDED system of your choice, Mega Modz Planet Buying Guide will set CONTROLLER you on the right path. Selecting a gadget that will turn around GUIDE your gaming routine is not easy and requires a thorough research of the market and the products offered. We are offering MODDED this guide as an online source of technical information, features CONTROLLERS overview, useful tips and technology comparison to reduce the confusion most gamers experience once find themselves in the ADVANCED middle of a modified gaming pad buying process. CONTROLLER CREATOR Now that you are ready to start learning about Mega Modz modding technology, let’s begin. CUSTOM CONTROLLER MODDED CONTROLLERS WITH PADDLES CONTROLLER MODS COMPATIBLE GAMES Any gaming controller becomes modded when a special modchip is installed inside of it. The chip presses the buttons on the remote on the behalf of the user, thus enabling a gaming character to implement actions in the game with greater ease. There is no hacking or any alteration of the original controller hardware involved in a modded remote building process except for adding of the additional chip, therefore using a product won’t get your account with Sony or Microsoft banned or suspended. There are a lot of modding companies on the market offering their own modchips that vary by a set of factors such as a memory capacity, a processor speed, a number or mods offered etc. Mods can be compared to the perks that are unlocked as the game progresses, they are helpful and fun, but not enough to succeed. -
PS/PS2-PS3-Konverter
COMPUTER PS/PS2-PS3-Konverter PS/PS2-PS3 Converter Convertisseur PS/PS2-PS3 P O Box 80 · 86651 Monheim/Germany Phone: +49 9091 502-0 Fax: +49 9091 502-458 [email protected] http://www.hama.com All listed brands are trademarks of the corresponding companies. Errors and omissions excepted, and subject to technical changes. Our general terms of delivery and payment are applied. 0051818/05.07 0 00051818 d Bedienungsanleitung I. Einführung Schritt 3) Wir freuen uns, dass Sie den PS/PS2 – PS3/PC Konverter gewählt haben und gratulieren Ihnen zu dieser Entscheidung. Wir sind Alle Betriebssysteme: überzeugt, dass Ihnen unser Produkt in den nächsten Jahren eine Menge Spaß beim Spielen bereiten wird. Die korrekte Funktion des Konverters können Sie überprüfen, indem Sie unter Start > Einstellungen > Systemsteuerung > Diese Kurzanleitung enthält wertvolle Hinweise zur Bedienung und Konfi guration des Adapters. Gamecontroller (Windows XP in der Standard-Ansicht: Start >Systemsteuerung > Drucker und andere Hardware > Gamecontroller) Bitte bewahren Sie diese Anleitung zum Nachschlagen an einem sicheren Ort auf. nachsehen. Dort muss sich der Eintrag „PLAYSTATION® 3 Controller“ befi nden. (Unter Windows 98SE heißt der Konverter „PS® Gamepad Adaptor“) Der Status dieses Gerätes sollte auf „OK“ stehen. II. Produkt-Eigenschaften Markieren Sie nun den Eintrag und klicken Sie mit der Maus auf „Eigenschaften“. - zum Anschluss eines Playstation-Controllers (Psone und PS2) an: Nun erscheint ein neues Fenster, in dem Sie den Controller testen können. • die Sony Playstation 3 • die USB-Schnittstelle des PC V. Tastenbeschreibung - geeignet für Standard- und Analog-Controller sowie Lenkräder - Analog-Funktion der Controller (nur Analog-Controller) wird auch auf dem PC unterstützt - Playstation, die keine Analogtaste besitzen können dennoch betrieben werden, da der Konverter eine PS2 Controller PS3 PC eigene PS3 Hometaste besitzt, um in das Controllermenü zu gelangen. -

Retrobox Instruction Manual
SKG Retrobox Instruction Manual Introduction Thank you for purchasing the SKG Retrobox. I hope you have a lot of fun revisiting the classic video games of years past. The SKG Retrobox is a Raspberry Pi 3, running the Retropie software. Retropie is a complete software solution for retro gaming, including an operating system, various emulators (an emulator is a piece of software designed to imitate, or imitate, a piece of hardware, like the NES or Sega Genesis), and a front end called Emulation Station. This manual is meant to be a basic guide as to how to use the device, and what it can do. The Retropie software has a lot of features, more than can be covered in this manual. Basic Instructions • Connect the unit to the TV with the HDMI cable. Plug the power adapter into the micro- USB port next to the HDMI port. Plug the controller into any USB port. • In the main screen, use left/right to select a system. If Kodi is installed, it will be under”Ports”. Select “Retropie” to go into the confguration options. Press the ‘A’ button to select the system. • In the system screen, use up/down to scroll through the list of games, one at a time. Use the left/right shoulder buttons to scroll through the list of games one page at a time. Press ‘A’ to play your game. The appropriate emulator will launch and your game will start. • To exit your game, and return to the system screen, press ‘Select’ and ‘Start’ at the same time. -
Playstation Network - Wikipedia Case 3:19-Cv-07027-WHA Document 28-1 Filed 10/14/19 Page 2 of 8 Not Logged in Talk Contributions Create Account Log In
Case 3:19-cv-07027-WHA Document 28-1 Filed 10/14/19 Page 1 of 8 EXHIBIT A PlayStation Network - Wikipedia Case 3:19-cv-07027-WHA Document 28-1 Filed 10/14/19 Page 2 of 8 Not logged in Talk Contributions Create account Log in Article Talk Read Edit View history PlayStation Network From Wikipedia, the free encyclopedia Main page Contents "PSN" redirects here. For other uses, see PSN (disambiguation). Featured content PlayStation Network (PSN) is a digital media entertainment service provided by Sony Interactive Entertainment. Launched in November Current events PlayStation Network 2006, PSN was originally conceived for the PlayStation video game consoles, but soon extended to encompass smartphones, tablets, Random article Donate to Wikipedia Blu-ray players and high-definition televisions. As of April 2016, over 110 million users have been documented, with 94 million of them [2][3] Wikipedia store active monthly as of May 2019. Developer Sony Interactive Entertainment PlayStation Network's services are dedicated to an online marketplace (PlayStation Store), a premium subscription service for enhanced Interaction Type Online service gaming and social features (PlayStation Plus), movie streaming, rentals and purchases (PlayStation Video), a cloud-based television Help Launch November 11, 2006; 12 years ago programming service (PlayStation Vue), music streaming (PlayStation Music, powered by Spotify) and a cloud gaming service About Wikipedia date (PlayStation Now). The service is available in 73 territories.[4] Community portal Platform Video -

RC71093 Manual
This device complies with Part 15 of the FCC the user is encouraged to try to correct the E Rules. Operation is subject to the following two interference by one or more of the following conditions: (1) this device may not cause measures: harmful interference, and (2) this device must • Reorient or relocate the receiving antenna. accept any interference received, including • Increase the separation between the equipment interference that may cause undesired TM operation. and receiver. Warning: Changes or modifications to this unit • Connect the equipment into an outlet on a not expressly approved by the party responsible circuit different from that to which the receiver is for compliance could void the user’s authority to connected. operate the equipment. • Consult the dealer or an experienced radio TV NOTE: This equipment has been tested and technician for help. found to comply with the limits for a Class B digital device, pursuant to Part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference in a residential installation. This equipment generates, uses, and can radiate radio frequency energy and, if not installed and used in RADICA: ® accordance with the instructions, may cause GAMESTER™ harmful interference to radio communications. PRO RACER, VIBRA FORCE, DUOPULSE VIBRATION AND “THE UNFAIR ADVANTAGE” ARE TRADEMARKS OF However, there is no guarantee that interference RADICA CHINA LTD. will not occur in a particular installation. If this © 2000 RADICA CHINA LTD. PRODUCT SHAPE™ equipment does cause harmful interference to ALL RIGHTS RESERVED INSTRUCTION MANUAL radio or television reception, which can be PLAYSTATION AND DUAL SHOCK ARE REGISTERED MODEL RC71093 determined by turning the equipment off and on, TRADEMARKS AND/OR TRADEMARKS OF SONY For 1 player / Ages 8 and up COMPUTER ENTERTAINMENT INC.