Foundations of Proof Complexity: Bounded Arithmetic and Propositional Translations
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Circuit Complexity, Proof Complexity and Polynomial Identity Testing
Electronic Colloquium on Computational Complexity, Report No. 52 (2014) Circuit Complexity, Proof Complexity and Polynomial Identity Testing Joshua A. Grochow and Toniann Pitassi April 12, 2014 Abstract We introduce a new and very natural algebraic proof system, which has tight connections to (algebraic) circuit complexity. In particular, we show that any super-polynomial lower bound on any Boolean tautology in our proof system implies that the permanent does not have polynomial- size algebraic circuits (VNP 6= VP). As a corollary to the proof, we also show that super- polynomial lower bounds on the number of lines in Polynomial Calculus proofs (as opposed to the usual measure of number of monomials) imply the Permanent versus Determinant Conjecture. Note that, prior to our work, there was no proof system for which lower bounds on an arbitrary tautology implied any computational lower bound. Our proof system helps clarify the relationships between previous algebraic proof systems, and begins to shed light on why proof complexity lower bounds for various proof systems have been so much harder than lower bounds on the corresponding circuit classes. In doing so, we highlight the importance of polynomial identity testing (PIT) for understanding proof complex- ity. More specifically, we introduce certain propositional axioms satisfied by any Boolean circuit computing PIT. (The existence of efficient proofs for our PIT axioms appears to be somewhere in between the major conjecture that PIT2 P and the known result that PIT2 P=poly.) We use these PIT axioms to shed light on AC0[p]-Frege lower bounds, which have been open for nearly 30 years, with no satisfactory explanation as to their apparent difficulty. -

Week 1: an Overview of Circuit Complexity 1 Welcome 2
Topics in Circuit Complexity (CS354, Fall’11) Week 1: An Overview of Circuit Complexity Lecture Notes for 9/27 and 9/29 Ryan Williams 1 Welcome The area of circuit complexity has a long history, starting in the 1940’s. It is full of open problems and frontiers that seem insurmountable, yet the literature on circuit complexity is fairly large. There is much that we do know, although it is scattered across several textbooks and academic papers. I think now is a good time to look again at circuit complexity with fresh eyes, and try to see what can be done. 2 Preliminaries An n-bit Boolean function has domain f0; 1gn and co-domain f0; 1g. At a high level, the basic question asked in circuit complexity is: given a collection of “simple functions” and a target Boolean function f, how efficiently can f be computed (on all inputs) using the simple functions? Of course, efficiency can be measured in many ways. The most natural measure is that of the “size” of computation: how many copies of these simple functions are necessary to compute f? Let B be a set of Boolean functions, which we call a basis set. The fan-in of a function g 2 B is the number of inputs that g takes. (Typical choices are fan-in 2, or unbounded fan-in, meaning that g can take any number of inputs.) We define a circuit C with n inputs and size s over a basis B, as follows. C consists of a directed acyclic graph (DAG) of s + n + 2 nodes, with n sources and one sink (the sth node in some fixed topological order on the nodes). -

The Complexity Zoo
The Complexity Zoo Scott Aaronson www.ScottAaronson.com LATEX Translation by Chris Bourke [email protected] 417 classes and counting 1 Contents 1 About This Document 3 2 Introductory Essay 4 2.1 Recommended Further Reading ......................... 4 2.2 Other Theory Compendia ............................ 5 2.3 Errors? ....................................... 5 3 Pronunciation Guide 6 4 Complexity Classes 10 5 Special Zoo Exhibit: Classes of Quantum States and Probability Distribu- tions 110 6 Acknowledgements 116 7 Bibliography 117 2 1 About This Document What is this? Well its a PDF version of the website www.ComplexityZoo.com typeset in LATEX using the complexity package. Well, what’s that? The original Complexity Zoo is a website created by Scott Aaronson which contains a (more or less) comprehensive list of Complexity Classes studied in the area of theoretical computer science known as Computa- tional Complexity. I took on the (mostly painless, thank god for regular expressions) task of translating the Zoo’s HTML code to LATEX for two reasons. First, as a regular Zoo patron, I thought, “what better way to honor such an endeavor than to spruce up the cages a bit and typeset them all in beautiful LATEX.” Second, I thought it would be a perfect project to develop complexity, a LATEX pack- age I’ve created that defines commands to typeset (almost) all of the complexity classes you’ll find here (along with some handy options that allow you to conveniently change the fonts with a single option parameters). To get the package, visit my own home page at http://www.cse.unl.edu/~cbourke/. -

Reflection Principles, Propositional Proof Systems, and Theories
Reflection principles, propositional proof systems, and theories In memory of Gaisi Takeuti Pavel Pudl´ak ∗ July 30, 2020 Abstract The reflection principle is the statement that if a sentence is provable then it is true. Reflection principles have been studied for first-order theories, but they also play an important role in propositional proof complexity. In this paper we will revisit some results about the reflection principles for propositional proofs systems using a finer scale of reflection principles. We will use the result that proving lower bounds on Resolution proofs is hard in Resolution. This appeared first in the recent article of Atserias and M¨uller [2] as a key lemma and was generalized and simplified in some spin- off papers [11, 13, 12]. We will also survey some results about arithmetical theories and proof systems associated with them. We will show a connection between a conjecture about proof complexity of finite consistency statements and a statement about proof systems associated with a theory. 1 Introduction arXiv:2007.14835v1 [math.LO] 29 Jul 2020 This paper is essentially a survey of some well-known results in proof complexity supple- mented with some observations. In most cases we will also sketch or give an idea of the proofs. Our aim is to focus on some interesting results rather than giving a complete ac- count of known results. We presuppose knowledge of basic concepts and theorems in proof complexity. An excellent source is Kraj´ıˇcek’s last book [19], where you can find the necessary definitions and read more about the results mentioned here. -

Contents Part 1. a Tour of Propositional Proof Complexity. 418 1. Is There A
The Bulletin of Symbolic Logic Volume 13, Number 4, Dec. 2007 THE COMPLEXITY OF PROPOSITIONAL PROOFS NATHAN SEGERLIND Abstract. Propositional proof complexity is the study of the sizes of propositional proofs, and more generally, the resources necessary to certify propositional tautologies. Questions about proof sizes have connections with computational complexity, theories of arithmetic, and satisfiability algorithms. This is article includes a broad survey of the field, and a technical exposition of some recently developed techniques for proving lower bounds on proof sizes. Contents Part 1. A tour of propositional proof complexity. 418 1. Is there a way to prove every tautology with a short proof? 418 2. Satisfiability algorithms and theories of arithmetic 420 3. A menagerie of Frege-like proof systems 427 4. Reverse mathematics of propositional principles 434 5. Feasible interpolation 437 6. Further connections with satisfiability algorithms 438 7. Beyond the Frege systems 441 Part 2. Some lower bounds on refutation sizes. 444 8. The size-width trade-off for resolution 445 9. The small restriction switching lemma 450 10. Expansion clean-up and random 3-CNFs 459 11. Resolution pseudowidth and very weak pigeonhole principles 467 Part 3. Open problems, further reading, acknowledgments. 471 Appendix. Notation. 472 References. 473 Received June 27, 2007. This survey article is based upon the author’s Sacks Prize winning PhD dissertation, however, the emphasis here is on context. The vast majority of results discussed are not the author’s, and several results from the author’s dissertation are omitted. c 2007, Association for Symbolic Logic 1079-8986/07/1304-0001/$7.50 417 418 NATHAN SEGERLIND Part 1. -

A Short History of Computational Complexity
The Computational Complexity Column by Lance FORTNOW NEC Laboratories America 4 Independence Way, Princeton, NJ 08540, USA [email protected] http://www.neci.nj.nec.com/homepages/fortnow/beatcs Every third year the Conference on Computational Complexity is held in Europe and this summer the University of Aarhus (Denmark) will host the meeting July 7-10. More details at the conference web page http://www.computationalcomplexity.org This month we present a historical view of computational complexity written by Steve Homer and myself. This is a preliminary version of a chapter to be included in an upcoming North-Holland Handbook of the History of Mathematical Logic edited by Dirk van Dalen, John Dawson and Aki Kanamori. A Short History of Computational Complexity Lance Fortnow1 Steve Homer2 NEC Research Institute Computer Science Department 4 Independence Way Boston University Princeton, NJ 08540 111 Cummington Street Boston, MA 02215 1 Introduction It all started with a machine. In 1936, Turing developed his theoretical com- putational model. He based his model on how he perceived mathematicians think. As digital computers were developed in the 40's and 50's, the Turing machine proved itself as the right theoretical model for computation. Quickly though we discovered that the basic Turing machine model fails to account for the amount of time or memory needed by a computer, a critical issue today but even more so in those early days of computing. The key idea to measure time and space as a function of the length of the input came in the early 1960's by Hartmanis and Stearns. -
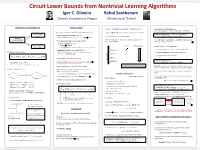
Lower Bounds from Learning Algorithms
Circuit Lower Bounds from Nontrivial Learning Algorithms Igor C. Oliveira Rahul Santhanam Charles University in Prague University of Oxford Motivation and Background Previous Work Lemma 1 [Speedup Phenomenon in Learning Theory]. From PSPACE BPTIME[exp(no(1))], simple padding argument implies: DSPACE[nω(1)] BPEXP. Some connections between algorithms and circuit lower bounds: Assume C[poly(n)] can be (weakly) learned in time 2n/nω(1). Lower bounds Lemma [Diagonalization] (3) (the proof is sketched later). “Fast SAT implies lower bounds” [KL’80] against C ? Let k N and ε > 0 be arbitrary constants. There is L DSPACE[nω(1)] that is not in C[poly]. “Nontrivial” If Circuit-SAT can be solved efficiently then EXP ⊈ P/poly. learning algorithm Then C-circuits of size nk can be learned to accuracy n-k in Since DSPACE[nω(1)] BPEXP, we get BPEXP C[poly], which for a circuit class C “Derandomization implies lower bounds” [KI’03] time at most exp(nε). completes the proof of Theorem 1. If PIT NSUBEXP then either (i) NEXP ⊈ P/poly; or 0 0 Improved algorithmic ACC -SAT ACC -Learning It remains to prove the following lemmas. upper bounds ? (ii) Permanent is not computed by poly-size arithmetic circuits. (1) Speedup Lemma (relies on recent work [CIKK’16]). “Nontrivial SAT implies lower bounds” [Wil’10] Nontrivial: 2n/nω(1) ? (Non-uniform) Circuit Classes: If Circuit-SAT for poly-size circuits can be solved in time (2) PSPACE Simulation Lemma (follows [KKO’13]). 2n/nω(1) then NEXP ⊈ P/poly. SETH: 2(1-ε)n ? ? (3) Diagonalization Lemma [Folklore]. -

A Superpolynomial Lower Bound on the Size of Uniform Non-Constant-Depth Threshold Circuits for the Permanent
A Superpolynomial Lower Bound on the Size of Uniform Non-constant-depth Threshold Circuits for the Permanent Pascal Koiran Sylvain Perifel LIP LIAFA Ecole´ Normale Superieure´ de Lyon Universite´ Paris Diderot – Paris 7 Lyon, France Paris, France [email protected] [email protected] Abstract—We show that the permanent cannot be computed speak of DLOGTIME-uniformity), Allender [1] (see also by DLOGTIME-uniform threshold or arithmetic circuits of similar results on circuits with modulo gates in [2]) has depth o(log log n) and polynomial size. shown that the permanent does not have threshold circuits of Keywords-permanent; lower bound; threshold circuits; uni- constant depth and “sub-subexponential” size. In this paper, form circuits; non-constant depth circuits; arithmetic circuits we obtain a tradeoff between size and depth: instead of sub-subexponential size, we only prove a superpolynomial lower bound on the size of the circuits, but now the depth I. INTRODUCTION is no more constant. More precisely, we show the following Both in Boolean and algebraic complexity, the permanent theorem. has proven to be a central problem and showing lower Theorem 1: The permanent does not have DLOGTIME- bounds on its complexity has become a major challenge. uniform polynomial-size threshold circuits of depth This central position certainly comes, among others, from its o(log log n). ]P-completeness [15], its VNP-completeness [14], and from It seems to be the first superpolynomial lower bound on Toda’s theorem stating that the permanent is as powerful the size of non-constant-depth threshold circuits for the as the whole polynomial hierarchy [13]. -

ECC 2015 English
© Springer-Verlag 2015 SpringerMedizin.at/memo_inoncology SpringerMedizin.at 2/15 /memo_inoncology memo – inOncology SPECIAL ISSUE Congress Report ECC 2015 A GLOBAL CONGRESS DIGEST ON NSCLC Report from the 18th ECCO- 40th ESMO European Cancer Congress, Vienna 25th–29th September 2015 Editorial Board: Alex A. Adjei, MD, PhD, FACP, Roswell Park, Cancer Institute, New York, USA Wolfgang Hilbe, MD, Departement of Oncology, Hematology and Palliative Care, Wilhelminenspital, Vienna, Austria Massimo Di Maio, MD, National Institute of Tumor Research and Th erapy, Foundation G. Pascale, Napoli, Italy Barbara Melosky, MD, FRCPC, University of British Columbia and British Columbia Cancer Agency, Vancouver, Canada Robert Pirker, MD, Medical University of Vienna, Vienna, Austria Yu Shyr, PhD, Department of Biostatistics, Biomedical Informatics, Cancer Biology, and Health Policy, Nashville, TN, USA Yi-Long Wu, MD, FACS, Guangdong Lung Cancer Institute, Guangzhou, PR China Riyaz Shah, PhD, FRCP, Kent Oncology Centre, Maidstone Hospital, Maidstone, UK Filippo de Marinis, MD, PhD, Director of the Th oracic Oncology Division at the European Institute of Oncology (IEO), Milan, Italy Supported by Boehringer Ingelheim in the form of an unrestricted grant IMPRESSUM/PUBLISHER Medieninhaber und Verleger: Springer-Verlag GmbH, Professional Media, Prinz-Eugen-Straße 8–10, 1040 Wien, Austria, Tel.: 01/330 24 15-0, Fax: 01/330 24 26-260, Internet: www.springer.at, www.SpringerMedizin.at. Eigentümer und Copyright: © 2015 Springer-Verlag/Wien. Springer ist Teil von Springer Science + Business Media, springer.at. Leitung Professional Media: Dr. Alois Sillaber. Fachredaktion Medizin: Dr. Judith Moser. Corporate Publishing: Elise Haidenthaller. Layout: Katharina Bruckner. Erscheinungsort: Wien. Verlagsort: Wien. Herstellungsort: Linz. Druck: Friedrich VDV, Vereinigte Druckereien- und Verlags-GmbH & CO KG, 4020 Linz; Die Herausgeber der memo, magazine of european medical oncology, übernehmen keine Verantwortung für diese Beilage. -

Lecture 10: Logspace Division and Its Consequences 1. Overview
IAS/PCMI Summer Session 2000 Clay Mathematics Undergraduate Program Advanced Course on Computational Complexity Lecture 10: Logspace Division and Its Consequences David Mix Barrington and Alexis Maciel July 28, 2000 1. Overview Building on the last two lectures, we complete the proof that DIVISION is in FOMP (first-order with majority quantifiers, BIT, and powering modulo short numbers) and thus in both L-uniform TC0 and L itself. We then examine the prospects for improving this result by putting DIVISION in FOM or truly uniform TC0, and look at some consequences of the L-uniform result for complexity classes with sublogarithmic space. We showed last time that we can divide a long number by a nice long number, • that is, a product of short powers of distinct primes. We also showed that given any Y , we can find a nice number D such that Y=2 D Y . We finish the proof by finding an approximation N=A for D=Y , where≤ A ≤is nice, that is good enough so that XN=AD is within one of X=Y . b c We review exactly how DIVISION, ITERATED MULTIPLICATION, and • POWERING of long integers (poly-many bits) are placed in FOMP by this argument. We review the complexity of powering modulo a short integer, and consider • how this affects the prospects of placing DIVISION and the related problems in FOM. Finally, we take a look at sublogarithmic space classes, in particular problems • solvable in space O(log log n). These classes are sensitive to the definition of the model. We argue that the more interesting classes are obtained by marking the space bound in the memory before the machine starts. -
Proof Complexity in Algebraic Systems and Bounded Depth Frege Systems with Modular Counting
PROOF COMPLEXITY IN ALGEBRAIC SYSTEMS AND BOUNDED DEPTH FREGE SYSTEMS WITH MODULAR COUNTING S. Buss, R. Impagliazzo, J. Kraj¶³cek,· P. Pudlak,¶ A. A. Razborov and J. Sgall Abstract. We prove a lower bound of the form N (1) on the degree of polynomials in a Nullstellensatz refutation of the Countq polynomials over Zm, where q is a prime not dividing m. In addition, we give an explicit construction of a degree N (1) design for the Countq principle over Zm. As a corollary, using Beame et al. (1994) we obtain (1) a lower bound of the form 2N for the number of formulas in a constant-depth N Frege proof of the modular counting principle Countq from instances of the counting M principle Countm . We discuss the polynomial calculus proof system and give a method of converting tree-like polynomial calculus derivations into low degree Nullstellensatz derivations. Further we show that a lower bound for proofs in a bounded depth Frege system in the language with the modular counting connective MODp follows from a lower bound on the degree of Nullstellensatz proofs with a constant number of levels of extension axioms, where the extension axioms comprise a formalization of the approximation method of Razborov (1987), Smolensky (1987) (in fact, these two proof systems are basically equivalent). Introduction A propositional proof system is intuitively a system for establishing the validity of propo- sitional tautologies in some ¯xed complete language. The formal de¯nition of propositional proof system is that it is a polynomial time function f which maps strings over an alphabet § onto the set of propositional tautologies (Cook & Reckhow 1979). -

On Monotone Circuits with Local Oracles and Clique Lower Bounds
On monotone circuits with local oracles and clique lower bounds Jan Kraj´ıˇcek Igor C. Oliveira Faculty of Mathematics and Physics Charles University in Prague December 17, 2019 Abstract We investigate monotone circuits with local oracles [K., 2016], i.e., circuits containing additional inputs yi = yi(~x) that can perform unstructured computations on the input string ~x. Let µ [0, 1] be the locality of the circuit, a parameter that bounds the combined ∈ m strength of the oracle functions yi(~x), and Un,k, Vn,k 0, 1 be the set of k-cliques and the set of complete (k 1)-partite graphs, respectively⊆ (similarly { } to [Razborov, 1985]). Our results can be informally− stated as follows. (i) For an appropriate extension of depth-2 monotone circuits with local oracles, we show that the size of the smallest circuits separating Un,3 (triangles) and Vn,3 (complete bipartite graphs) undergoes two phase transitions according to µ. (ii) For 5 k(n) n1/4, arbitrary depth, and µ 1/50, we prove that the monotone ≤ ≤ ≤ Θ(√k) circuit size complexity of separating the sets Un,k and Vn,k is n , under a certain restrictive assumption on the local oracle gates. The second result, which concerns monotone circuits with restricted oracles, extends and provides a matching upper bound for the exponential lower bounds on the monotone circuit size complexity of k-clique obtained by Alon and Boppana (1987). 1 Introduction and motivation arXiv:1704.06241v3 [cs.CC] 16 Dec 2019 We establish initial lower bounds on the power of monotone circuits with local oracles (mono- tone CLOs), an extension of monotone circuits introduced in [Kra16] motivated by problems in proof complexity.