Toss and Spin Juggling State Graphs
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

National Circus and Acrobats of the People's Republic of China
Friday, September 11, 2015, 8pm Saturday, September 12, 2015, 2pm & 8pm Zellerbach Hall National Circus and Acrobats of the People’s Republic of China Peking Dreams Cal Performances’ $"#%–$"#& season is sponsored by Wells Fargo. PROGRAM Peking Dreams EKING (known today as Beijing), the capital of the People’s Republic of China, is a Pfamous historical and cultural city with a history spanning 1,000 years and a wealth of precious Chinese cultural heritage, including the Great Wall, the Forbidden City, the Summer Palace, and the Temple of Heaven. Acrobatic art, Chinese circus, and Peking opera are Chinese cultural treasures and are beloved among the people of Peking. These art forms combine music, acrobatics, performance, mime, and dance and share many similarities with Western culture. Foreign tourists walking along the streets or strolling through the parks of Peking can often hear natives sing beautiful Peking opera, see them play diabolo or perform other acrobatics. Peking Dreams , incorporating elements of acrobatics, Chinese circus, and Peking opera, invites audiences into an artistic world full of history and wonder. The actors’ flawless performance, colorful costumes, and elaborate makeup will astound audiences with visual and aural treats. PROGRAM Opening Acrobatic Master and His Pupils The Peking courtyard is bathed in bright moonlight. In the dim light of the training room, three children formally become pupils to an acrobatic master. Through patient teaching, the master is determined to pass his art and tradition down to his pupils. The Drunken Beauty Amidst hundreds of flowers in bloom, the imperial concubine in the Forbidden City admires the full moon while drinking and toasting. -

Inspiring Mathematical Creativity Through Juggling
Journal of Humanistic Mathematics Volume 10 | Issue 2 July 2020 Inspiring Mathematical Creativity through Juggling Ceire Monahan Montclair State University Mika Munakata Montclair State University Ashwin Vaidya Montclair State University Sean Gandini Follow this and additional works at: https://scholarship.claremont.edu/jhm Part of the Arts and Humanities Commons, and the Mathematics Commons Recommended Citation Monahan, C. Munakata, M. Vaidya, A. and Gandini, S. "Inspiring Mathematical Creativity through Juggling," Journal of Humanistic Mathematics, Volume 10 Issue 2 (July 2020), pages 291-314. DOI: 10.5642/ jhummath.202002.14 . Available at: https://scholarship.claremont.edu/jhm/vol10/iss2/14 ©2020 by the authors. This work is licensed under a Creative Commons License. JHM is an open access bi-annual journal sponsored by the Claremont Center for the Mathematical Sciences and published by the Claremont Colleges Library | ISSN 2159-8118 | http://scholarship.claremont.edu/jhm/ The editorial staff of JHM works hard to make sure the scholarship disseminated in JHM is accurate and upholds professional ethical guidelines. However the views and opinions expressed in each published manuscript belong exclusively to the individual contributor(s). The publisher and the editors do not endorse or accept responsibility for them. See https://scholarship.claremont.edu/jhm/policies.html for more information. Inspiring Mathematical Creativity Through Juggling Ceire Monahan Department of Mathematical Sciences, Montclair State University, New Jersey, USA -

The Beginner's Guide to Circus and Street Theatre
The Beginner’s Guide to Circus and Street Theatre www.premierecircus.com Circus Terms Aerial: acts which take place on apparatus which hang from above, such as silks, trapeze, Spanish web, corde lisse, and aerial hoop. Trapeze- An aerial apparatus with a bar, Silks or Tissu- The artist suspended by ropes. Our climbs, wraps, rotates and double static trapeze acts drops within a piece of involve two performers on fabric that is draped from the one trapeze, in which the ceiling, exhibiting pure they perform a wide strength and grace with a range of movements good measure of dramatic including balances, drops, twists and falls. hangs and strength and flexibility manoeuvres on the trapeze bar and in the ropes supporting the trapeze. Spanish web/ Web- An aerialist is suspended high above on Corde Lisse- Literally a single rope, meaning “Smooth Rope”, while spinning Corde Lisse is a single at high speed length of rope hanging from ankle or from above, which the wrist. This aerialist wraps around extreme act is their body to hang, drop dynamic and and slide. mesmerising. The rope is spun by another person, who remains on the ground holding the bottom of the rope. Rigging- A system for hanging aerial equipment. REMEMBER Aerial Hoop- An elegant you will need a strong fixed aerial display where the point (minimum ½ ton safe performer twists weight bearing load per rigging themselves in, on, under point) for aerial artists to rig from and around a steel hoop if they are performing indoors: or ring suspended from the height varies according to the ceiling, usually about apparatus. -
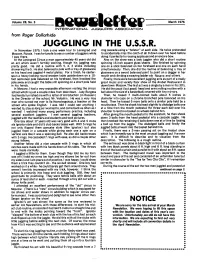
JUGGLING in the U.S.S.R. in November 1975, I Took a One Week Tour to Leningrad and Ring Cascade Using a "Holster” at Each Side
Volume 28. No. 3 March 1976 INTERNATIONAL JUGGLERS ASSOCIATION from Roger Dol/arhide JUGGLING IN THE U.S.S.R. In November 1975, I took a one week tour to Leningrad and ring cascade using a "holster” at each side. He twice pretended Moscow, Russia. I wasfortunate to see a number of jugglers while to accidentally miss the catch of all 9 down over his head before I was there. doing it perfectly to rousing applause and an encore bow. At the Leningrad Circus a man approximately 45 years old did Also on the show was a lady juggler who did a short routine an act which wasn’t terribly exciting, though his juggling was spinning 15-inch square glass sheets. She finished by spinning pretty good. He did a routine with 5, 4, 3 sticks including one on a stick balanced on her forehead and one on each hand showering the 5. He also balanced a pole with a tray of glassware simultaneously. Then, she did the routine of balancing a tray of on his head and juggled 4 metaf plates. For a finish, he cqnter- glassware on a sword balanced point to point on a dagger in her spun a heavy-looking round wooden table upside-down on a 10- mouth and climbing a swaying ladder ala Rosana and others. foot sectioned pole balanced on his forehead, then knocked the Finally, there were two excellent juggling acts as part of a really pole away and caught the table still spinning on a short pole held great music and variety floor show at the Arabat Restaurant in in his hands. -

Circus Class Overview & Links to Victorian Curriculum
Circus Class Overview & Links to Victorian Curriculum FunFit Circus classes assist students to develop a variety of circus skills that are increasingly popular today. There is nothing like learning a new skill for satisfaction and self-approval. With our huge range of different circus disciplines, there’s something for everyone. Most are individual activities so students can learn at their own pace and hone in on the circus toys they love. They can then work together on partner and group skills and even create short or long circus shows. Circus skills are also something that students can take home and develop. Families and friends love watching as students proudly perform their new circus tricks! Each class addresses the Victorian Curriculum learning area of Health and Physical Education through the strand and sub-strands identified below: Health and Physical Education: Movement and Physical Activity • Moving the body • Understanding movement • Learning through movement Circus classes may also align to the following learning areas and capabilities: • Health and Physical Education: Personal, Social and Community Health • The Arts: Dance • The Arts: Drama • The Arts: Music • Personal and Social Capability • Critical and Creative Thinking Capability For a more detailed understanding of what and how the Movement and Physical Activity content descriptors are addressed through our Circus classes see below: Foundation Level – Includes Juggling, Hula Hoops, Acrobalance, Poi, Staff, Diabolo and Clowning Movement & Physical Activity: Sub-Strand Curriculum (what) - Content Description Pedagogy (how) – Through these circus workshops students will: Practice fundamental movement skills and Practice a variety of fundamental movement skills through a fun warm up activity. -

Juggling – 15013000/15013100 HOPE PE 1506320G
Course: Juggling – 15013000/15013100 HOPE PE 1506320G Credit for Graduation: 1.0 Credit – HOPE elective credit / Physical Education Credit Pre-requisite: Desire to explore and develop the skill set needed for juggling. Description: Expectations: The purpose of this course is to provide students Students will be expected to embrace the many with the knowledge, skills, and values they need to challenges involved in developing a unique skill become healthy and physically active for a lifetime. set. In addition to developing skills with assorted This course addresses both the health and skill- props, students will be expected to learn about related components of physical fitness which are the greater juggling community, learning theory, critical for students' success. The SAIL juggling program exists to promote self-expression and to prop building, routine development etc. encourage creativity. Students will have the Participation and movement are key components opportunity to form new friendships and develop for being successful in this course. skills that will last a lifetime. In addition to conventional ball, club and ring juggling, students will be exposed to a plethora of props likely including but not limited to unicycle, cigar box manipulation, rolla bolla, contact juggling, card throwing, throw top, yo-yo, diabolo, hacky sack, passing, kendama and ball spinning. Resources/Materials: Assorted jugging equipment Website: https://www.leonschools.net/Domain/2453 Course: Juggling 15013000 / 15013000 HOPE PE: #15063200 Credit for Graduation: 1.0 Credit - HOPE elective credit Pre-requisite: Description: Expectations: HOPE PE: The purpose of this course is to develop and enhance healthy behaviors that influence lifestyle choices and student health and fitness. -
CNO Awarded at IHS Tribal Urban Awards Ceremony
State-of-the-art Chahta Oklahoma press at Texoma Foundation teams play Print Services works to secure in Stickball Choctaw legacy World Series Page 3 Page 9 Page 18 BISKINIK CHANGE SERVICE REQUESTED PRESORT STD P.O. Box 1210 AUTO Durant OK 74702 U.S. POSTAGE PAID CHOCTAW NATION BISKINIKThe Official Publication of the Choctaw Nation of Oklahoma August 2012 Issue CNO awarded at IHS Tribal Urban Awards Ceremony By LISA REED services staff, the Choctaw Nation Choctaw Nation of Oklahoma has several new programs aimed at educating us on improving our life- The ninth annual Oklahoma styles.” City Area Director’s Indian Health Receiving awards were: Service Tribal Urban Awards Cer- • Area Director’s National Impact emony was held July 19 at the Na- – Mickey Peercy, Choctaw Nation’s tional Cowboy & Western Heritage Executive Director of Health. Museum in Oklahoma City. Chief • Area Director’s Area Impact – Gregory E. Pyle assisted in present- Jill Anderson, Clinic Director of the ing awards to the recipients from the Choctaw Health Clinic in McAles- Choctaw Nation of Oklahoma. Thir- ter. teen individuals and one group from • Area Director’s Lifetime the Choctaw Nation’s service area Achievement Award – Kelly Mings, were recognized for their dedica- Chief Financial Officer for Choctaw tion and contributions to improving Nation Health Services. the health and well-being of Native • Exceptional Group Performance Americans. Award Clinical – Chi Hullo Li, The “I would like to commend all who Choctaw Nation’s long-term com- are here today,” said Chief Pyle. prehensive residential treatment pro- “Their hard work and dedication gram for Native American women Choctaw Nation: LISA REED are exemplary. -

In-Jest-Study-Guide
with Nels Ross “The Inspirational Oddball” . Study Guide ABOUT THE PRESENTER Nels Ross is an acclaimed performer and speaker who has won the hearts of international audiences. Applying his diverse background in performing arts and education, Nels works solo and with others to present school assemblies and programs which blend physical theater, variety arts, humor, and inspiration… All “in jest,” or in fun! ABOUT THE PROGRAM In Jest school assemblies and programs are based on the underlying principle that every person has value. Whether highlighting character, healthy choices, science & math, reading, or another theme, Nels employs physical theater and participation to engage the audience, juggling and other variety arts to teach the concepts, and humor to make it both fun and memorable. GOALS AND OBJECTIVES This program will enhance awareness and appreciation of physical theater and variety arts. In addition, the activities below provide connections to learning standards and the chosen theme. (What theme? Ask your artsineducation or assembly coordinator which specific program is coming to your school, and see InJest.com/schoolassemblyprograms for the latest description.) GETTING READY FOR THE PROGRAM ● Arrange for a clean, well lit SPACE, adjusting lights in advance as needed. Nels brings his own sound system, and requests ACCESS 4560 minutes before & after for set up & take down. ● Make announcements the day before to remind students and staff. For example: “Tomorrow we will have an exciting program with Nels Ross from In Jest. Be prepared to enjoy humor, juggling, and stunts in this uplifting celebration!” ● Discuss things which students might see and terms which they might not know: Physical Theater.. -

HISTORY and STAGE METHOD of JUGGLING with HULA HOOPS Oleksandra Sobolieva Kyiv Municipal Academy of Circus and Variety Arts, Kiev, Ukraine
INNOVATIVE SOLUTIONS IN MODERN SCIENCE № 2(11), 2017 UDC 792 (792.7) HISTORY AND STAGE METHOD OF JUGGLING WITH HULA HOOPS Oleksandra Sobolieva Kyiv Municipal Academy of Circus and Variety Arts, Kiev, Ukraine Research the methods of teaching juggling tricks by the big and small hula hoops, due to rising demand for hula hoops in recent years. Hula hoops acquire much popularity both abroad and in Ukraine, and are used not only in school, gymnastics and emotional pleasure, but also in a circus and juggling sports. Also highlights the main directions in the juggling with their features and how the juggling acts itself directly on human health. Also will be examined where this fascinating art form came to us, how it developed, and what kinds acquired in the present. Keywords: hula hoops, juggling, "track", stage technique, white substance, "helicopter". Problem definition and analysis of researches. Today juggling reached incredible development. There is no country where people would not be interested in juggling. There are a lot of conventions and juggling competitions, where people come from all over the world and share experiences with each other. But it should be noted, that there aren’t so much professional juggling schools. And if we talk about juggling by hula hoops, we can admit that there aren’t so much real experts in this field. Peter Bon, Tony Buzan in collaboration with Michael J. Gelb, Luke Burridge, Alexander Kiss, Paul Koshel and many others have written about all kinds of juggling, but left unattended hula hoops juggling. That is why in this article will be examples of author’s tricks with large and small hula hoops with a detailed description. -
The Neuroscience of Learned Behaviors
Train Your Brain The Neuroscience of Learned Behaviors by Gregory L. Vogt, Ed.D., Barbara Z. Tharp, M.S., Christopher Burnett, B.A., and Nancy P. Moreno, Ph.D. © 2015 Baylor College of Medicine © 2015 by Baylor College of Medicine. All rights reserved. Field-test version. Printed in the United States of America. ISBN: 978-1-944035-03-7 BioEdSM TEACHER RESOURCES FROM THE CENTER FOR EDUCATIONAL OUTREACH AT BAYLOR COLLEGE OF MEDICINE The mark “BioEd” is a service mark of Baylor College of Medicine. Development of The Learning Brain educational materials was supported by grant number 5R25DA033006 from the National Institutes of Health, NIH Blueprint for Neuroscience Research Science Education Award, National Institute on Drug Abuse (NIDA), administered through the Office of the Director, Science Education Partnership Award program (Principal Investigator, Nancy Moreno, Ph.D.). The activities described in this book are intended for school-age children under direct supervision of adults. The authors, BCM, NIDA and NIH cannot be responsible for any accidents or injuries that may result from conduct of the activities, from not specifically following directions, or from ignoring cautions contained in the text. The opinions, findings and conclusions expressed in this publication are solely those of the authors and do not necessarily reflect the views of BCM, image contributors or the sponsoring agencies. No part of this book may be reproduced by any mechanical, photographic or electronic process, or in the form of an audio recording; nor may it be stored in a retrieval system, transmitted, or otherwise copied for public or private use without prior written permission of the publisher. -

IJA Enewsletter Editor Don Lewis (Email: [email protected]) Renew at Http
THE INTERNATIONAL JUGGLERS! ASSOCIATION August 2011 IJA eNewsletter editor Don Lewis (email: [email protected]) Renew at http:www.juggle.org/renew IJA eNewsletter IJA Stage Championships Results, July 21 - 22, 2011 Individuals Contents: 1st: Tony Pezzo 2011 Championships Results 2nd: Kitamura Shintarou IJA Busking Competition 3rd: Tomohiro Kobayashi Joggling Correction Video Download Help Teams Club Tricks Handouts 1st: Showy Motion - Stefan Brancel and Ben Hestness Magazine Process 2nd: Smirk - Reid Belstock and Warren Hammond Will Murray in Afghanistan 3rd: The Jugheads - Rory Bade, Michael Barreto, Alex Behr, Daniel Burke, Sean YEP Report Carney, Tom Gaasedelen, Joe Gould, Danny Gratzer, Conor Hussey, Reid Johnson, Griffin Kelley, Jonny Langholz, Jack Levy, Chris Lovdal, Mara Moettus, Chris Olson, Montreal Circus Festival Evan Peter, Scott Schultz, Joey Spicola, and Brenden Ying Stagecraft Corner Regional Festivals Juniors Best Catches IJA Games Winners 1st: David Ferman 2nd: Jack Denger FLIC Auditions 3rd: Patrick Fraser Busking Competition 1st: Cate Flaherty 2nd: Kevin Axtell 3rd: Gypsy Geoff See all the results online at: http://www.juggle.org/history/champs/champs2011.php Juggling Festivals: Davidson, NC S.Gloucestershire, UK Kansas City, MO Portland, OR Philadelphia, PA Asheville, NC St. Louis, MO Baden, PA Waidhofen, Austria North Goa, India Bali, Indonesia photo: Martin Frost WWW.JUGGLE.ORG Page 1 THE INTERNATIONAL JUGGLERS! ASSOCIATION August 2011 IJA Busking Competition, Most of us know there are a lot of great buskers amongst IJA members, but most of us don!t get to see their street acts in the wild. Stage shows and street shows are totally different dynamics, and different again from the zaniness that occurs on the Renegade stage. -
The Mathematics of Juggling
The Mathematics of Juggling Stephen Hardy March 25, 2016 Stephen Hardy: The Mathematics of Juggling 1 Introduction Goals of the Talk I Learn a little about juggling. I Learn a little mathematics. I Have some fun. Stephen Hardy: The Mathematics of Juggling 2 Introduction Reference Most of the material for this talk was gleaned from Burkard Polster's great little book The Mathematics of Juggling: Stephen Hardy: The Mathematics of Juggling 3 What is Juggling? What is Juggling? Juggling takes many forms... Stephen Hardy: The Mathematics of Juggling 4 What is Juggling? Examples Jonathan Alexander http://adoreministries.com/, Kevin Rivoli http://www.syracuse.com/ Stephen Hardy: The Mathematics of Juggling 5 What is Juggling? Diablo Tony Frebourg - http://historicaljugglingprops.com/ Stephen Hardy: The Mathematics of Juggling 6 What is Juggling? Flair Bartending Ami Shroff - https://www.facebook.com/amibehramshroff Stephen Hardy: The Mathematics of Juggling 7 What is Juggling? Contact Juggling Michael Moschen - http://www.michaelmoschen.com/ Stephen Hardy: The Mathematics of Juggling 8 What is Juggling? Bounce Juggling Dan Menendez - http://pianojuggler.com/ Stephen Hardy: The Mathematics of Juggling 9 What is Juggling? Juggling is... I Juggling is manipulating more objects than hands you are using. Bob Whitcomb, http://historicaljugglingprops.com/ I We are interested in toss juggling. Stephen Hardy: The Mathematics of Juggling 10 What is Juggling? Toss Juggling Rings Anthony Gatto - http://www.anthonygatto.com/ Stephen Hardy: The Mathematics of Juggling 11 What is Juggling? Toss Juggling Clubs Jason Garfield - http://jasongarfield.com/ Stephen Hardy: The Mathematics of Juggling 12 What is Juggling? Toss Juggling Knives Edward Gosling - http://chivaree.co.uk/ Stephen Hardy: The Mathematics of Juggling 13 What is Juggling? Toss Juggling (Passing) Cirque Dreams Jungle Fantasy - https://en.wikipedia.org/wiki/Juggling_ring Stephen Hardy: The Mathematics of Juggling 14 What is Juggling? Toss Juggling We will focus on a single person toss juggling with two hands.