Flexray Static Segment Scheduling
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

BMW U.S. Media Information Technical Data 2018 BMW X5
BMW U.S. Media Information Technical Data 2018 BMW X5 Sports Activity Vehicle X5 sDrive35i X5 xDrive35i X5 xDrive50i X5 xDrive35d X5 xDrive40e Transmission type automatic automatic automatic automatic automatic Body Seats -- 5 5 5 5 5 Number of Doors -- 5 5 5 5 5 drive type -- RWD AWD AWD AWD AWD Veh. length inch 193.2 193.2 193.2 193.2 193.2 Veh. width inch 76.3 76.3 76.3 76.3 76.3 Width incl mirrors inch 86 86 86 86 86 Veh. height inch 69.4 69.4 69.4 69.4 69.4 Wheelbase inch 115.5 115.5 115.5 115.5 115.5 Overhang front inch 35.9 35.9 35.9 35.9 35.9 Rear overhang inch 41.9 41.9 41.9 41.9 41.9 Ground clearance inch 8.2 8.2 8.2 8.2 8.2 Turning circle ft 41.7 41.7 41.7 41.7 41.7 Legroom front inch 40.4 40.4 40.4 40.4 40.4 Legroom 2nd row inch 36.6 36.6 36.6 36.6 36.6 Shoulder room front inch 60.5 60.5 60.5 60.5 60.5 Shoulder room rear inch 58.3 58.3 58.3 58.3 58.3 Headroom front inch 40.5 40.5 40.5 40.5 40.5 Maximum headroom 2nd row inch 38.8 38.8 38.8 38.8 38.8 Headroom front with moonroof inch 39.8 39.8 39.8 39.8 39.8 Maximum headroom 2nd row with moonroof inch 38.3 38.3 38.3 38.3 38.3 Front Seat Volume ft³ 57.3 57.3 57.3 57.3 57.3 Rear Seat Volume ft³ 47.9 47.9 47.9 47.9 47.9 Approach angle front ° 22.2 22.2 22.2 22.2 22.2 Departure angle rear ° 20.4 20.4 20.4 20.4 20.4 Ramp angle ° 17.3 17.3 17.3 17.3 17.3 Axle clearance front inch 7.2 7.2 7.2 7.2 7.2 Axle clearance rear inch 7.6 7.6 7.6 7.6 7.6 fording depth (without auxiliary heating) inch 19.7 19.7 19.7 19.7 19.7 climbing ability % 50 50 50 50 50 climbing ability starting % 32 32 32 32 32 Press Trunk volume (SAE) ft³ 35.8-76.7 35.8-76.7 35.8-76.7 35.8-76.7 34.2-72.5 US Tank capacity - series gal 22.4 22.4 22.4 22.4 22.4 Weight distribution front / rear (empty car) % 47.9 / 52.1 49.1 / 50.9 50 / 50 50.4 / 49.6 45.8 / 54.2 US Curb weight lbs 4625 4735 5095 4875 5220 Engine Engine type -- N55B30M0 N55B30M0 N63B44O1 N57D30O1 N20B20O0 Cylinders -- 6 6 8 6 4 Valves p.cyl. -

2011 X5 M X6 M Technical Data Oct2010
BMW U.S. Media Information Contacts: Thomas Plucinsky Product & Technology Communications Manager 201-307-3783 / [email protected] David J. Buchko Advanced Powertrain & Heritage Communications 201-307-3709 / [email protected] Matthew Russell BMW Product & Technology Communications Tel. 201-307-3755 [email protected] Technical Data. 2011 BMW X5 M and X6 M. X5 M X6 M Sport Activity Vehicle Sports Activity Coupe 10.01.2010 Automatic 6 Speed Automatic 6 Speed Body No of doors / seats - 5 / 5 5 / 4 Vehicle length mm / inch 4851 / 191 4876 / 192 Vehicle width mm / inch 1994 / 78.5 1983 / 78.1 Vehicle height, unloaded mm / inch 1764 / 69.4 1684 / 66.3 Wheelbase mm / inch 2933 / 115.5 2933 / 115.5 Turning cicle m / ft 12.8 / 42.0 12.8 / 42.0 Track, front mm / inch 1660 / 65.4 1660 / 65.4 Track, rear mm / inch 1672 / 65.8 1672 / 65.8 Width at shoulderheight, front mm / inch 1523 / 60 1521 / 59.9 Width at shoulderheight, rear mm / inch 1474 / 58 1448 / 57.0 Eff leg room, front mm / inch 1015 / 40.0 1025 / 40.4 Eff leg room, rear mm / inch 929 / 36.6 912 / 35.9 Eff head room, front mm / inch 998 / 39.3 973 / 38.3 Eff head room, rear mm / inch 991 / 39.0 946 / 37.2 Trunk volume acc SAE1100 ft³ 35.8/75.2 25.6/59.7 Approx tank capacity L / gal 85 / 22.5 85 / 22.5 Unladen weight kg / lbs 2435 / 5368 2415 / 5324 Weight distribution Front/Rear % 51.7 / 48.3 52.4 / 47.6 Gross vehicle weight kg / lbs 2935 / 6471 2840 / 6261 Payload kg / lbs 500 / 1102 425 / 937 Axle load limit, front kg / lbs 1430 / 3153 1430 / 3153 Axle load limit, -

The New Bmw X5
The Ultimate Driving Machine THE NEW BMW X5. BMW EFFICIENTDYNAMICS. LESS EMISSIONS. MORE DRIVING PLEASURE. THE NEW BMW X5. 18 Equipment highlights 20 Exterior colours 22 Interior colours 24 Wheels and tyres EVERYTHING. MULTIPLIED BY X. A CHALLENGE. TO ALL THE OTHERS. ENTRY AT THE HIGHEST LEVEL. ABSOLUTE CONTROL. DOESN’T ASK, JUST ACTS. ALWAYS LOOKING AHEAD. POWERFUL PRESENCE IN EXTERIOR DESIGN FORWARD-LOOKING APPEARANCE WITH STRIKING SIDE CONTOUR || OPTIONAL BMW LASERLIGHTS WITH ILLUMINATED X SIGNATURE || A CHOICE OF OPTIONAL 22" LIGHT ALLOY WHEELS (STANDARD FOR M5d). ADVANCED DRIVER ASSISTANCE AND CONNECTIVITY DRIVING ASSISTANT PROFESSIONAL OPTION SUPPORTS EXTENSIVE SAFETY AND COMFORT FEATURES || CUSTOMISABLE BMW LIVE COCKPIT PROFESSIONAL WITH TWO 12.3" DISPLAYS. LUXURIOUS AND COMFORTABLE WELCOME LIGHT CARPET || AMBIENT LIGHTING WITH DYNAMIC FUNCTION || OPTIONAL SKY LOUNGE PANORAMIC GLASS SUNROOF || MARK GOALS AUTOMATIC TAILGATE. OUTSTANDING DRIVING DYNAMICS ON ANY SURFACE BMW xDRIVE || ADAPTIVE TWO-AXLE AIR SUSPENSION FOR xLINE AND M SPORT MODELS || ADAPTIVE M SUSPENSION FOR M5d || OPTIONAL xOFFROAD PACKAGE AND INTEGRAL WITH AN X. ACTIVE STEERING || ACTIVE AIR STREAM KIDNEY GRILLE || EFFICIENT LIGHTWEIGHT. KNOW YOU CAN – THE NEW BMW X5. Equipment 18 | 19 EQUIPMENT HIGHLIGHTS. Standard equipment Optional equipment In laser high-beam mode, BMW Laserlights are a unique X design that BMW Live Cockpit Professional consists of a 12.3" Control Display and Ambient light creates a relaxed lighting atmosphere and includes a Enhanced Bluetooth with The harman/kardon illuminate a range of up to 5m, nearly twice as far as that of conventional a fully digital 12.3" instrument display. choice of six pre-designed light designs including dynamic function. -

BMW U.S. Media Information Technical Data 2017 BMW X5
BMW U.S. Media Information Technical Data 2017 BMW X5 Sports Activity Vehicle X5 sDrive35i X5 xDrive35i X5 xDrive50i X5 xDrive35d X5 xDrive40e Transmission type automatic automatic automatic automatic automatic Body Seats -- 5 5 5 5 5 Number of Doors -- 5 5 5 5 5 drive type -- RWD AWD AWD AWD AWD Veh. length inch 193.2 193.2 193.2 193.2 193.2 Veh. width inch 76.3 76.3 76.3 76.3 76.3 Width incl mirrors inch 86 86 86 86 86 Veh. height inch 69.4 69.4 69.4 69.4 69.4 Wheelbase inch 115.5 115.5 115.5 115.5 115.5 Overhang front inch 35.9 35.9 35.9 35.9 35.9 Rear overhang inch 41.9 41.9 41.9 41.9 41.9 Ground clearance inch 8.2 8.2 8.2 8.2 8.2 Turning circle ft 41.7 41.7 41.7 41.7 41.7 Legroom front inch 40.4 40.4 40.4 40.4 40.4 Legroom 2nd row inch 36.6 36.6 36.6 36.6 36.6 Shoulder room front inch 60.5 60.5 60.5 60.5 60.5 Shoulder room rear inch 58.3 58.3 58.3 58.3 58.3 Headroom front inch 40.5 40.5 40.5 40.5 40.5 Maximum headroom 2nd row inch 38.8 38.8 38.8 38.8 38.8 Headroom front with moonroof inch 39.8 39.8 39.8 39.8 39.8 Maximum headroom 2nd row with moonroof inch 38.3 38.3 38.3 38.3 38.3 Front Seat Volume ft³ 57.3 57.3 57.3 57.3 57.3 Rear Seat Volume ft³ 47.9 47.9 47.9 47.9 47.9 Approach angle front ° 22.2 22.2 22.2 22.2 22.2 Departure angle rear ° 20.4 20.4 20.4 20.4 20.4 Ramp angle ° 17.3 17.3 17.3 17.3 17.3 Axle clearance front inch 7.2 7.2 7.2 7.2 7.2 Axle clearance rear inch 7.6 7.6 7.6 7.6 7.6 fording depth (without auxiliary heating) inch 19.7 19.7 19.7 19.7 19.7 climbing ability % 50 50 50 50 50 climbing ability starting % 32 32 -

BMW PHEV Faqs Gear up for Client Questions
BMW PHEV FAQs Gear Up for Client Questions BMW plug-in hybrid vehicles (PHEV) consist of a powerful electric motor and an efficient combustion engine that work in tandem for ultimate performance. BMW 330e (sDrive and xDrive) BMW 530e (sDrive and xDrive) BMW 745e xDrive BMW X5 xDrive45e BMW X3 30e General Q: Where is my tachometer? A: A simple tachometer could not do the job as we have to take into account the gas engine and the electric motor that run at different speeds. So instead of a tachometer, you’ll see a power meter that shows you how much power you are using at the moment, and how much power you have left. This power meter shows you the combined possible output of the gasoline engine and the electric motor in one gauge. Q: How do the different drive modes work? A: You can determine combinations between “drive modes” (e.g. Sport, Hybrid, Electric) and Battery Control — on the 330e, 530e, 745e and X5 45e to tailor the vehicle’s behavior to your needs. For the X3 30e, the eDrive button switches between Auto e, Max eDrive and SAVE Battery. • Hybrid (default setting): This is the most efficient setting, with both the engine and electric motor working efficiently in tandem. The intelligent operating strategy determines the most efficient drive combination at all times and switches to it automatically. On the X3 30e, a similar mode is called “Auto e” • Electric (all-electric driving mode): The vehicle is powered solely by the electric motor. This mode is designed for comfortable driving with zero local emissions without the engine being started. -
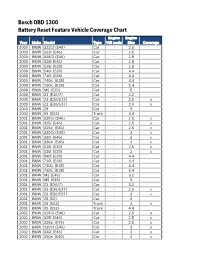
OBD 1300 Battery Reset Vehicle Coverage Chart
Bosch OBD 1300 Battery Reset Feature Vehicle Coverage Chart Engine Engine Year Make Model Type VIN code Size Coverage 2000 BMW 323Ci (E46) Car - 2.5 2000 BMW 323i (E46) Car - 2.5 2000 BMW 328Ci (E46) Car - 2.8 2000 BMW 328i (E46) Car - 2.8 2000 BMW 528i (E39) Car - 2.8 2000 BMW 540i (E39) Car - 4.4 2000 BMW 740i (E38) Car - 4.4 2000 BMW 740iL (E38) Car - 4.4 2000 BMW 750iL (E38) Car - 5.4 2000 BMW M5 (E39) Car - 5 2000 BMW Z3 (E36/7) Car - 3.2 2000 BMW Z3 (E36/E37) Car - 2.5 x 2000 BMW Z3 (E36/E37) Car - 2.8 x 2000 BMW Z8 Car - 5 2000 BMW X5 (E53) Truck - 4.4 2001 BMW 325Ci (E46) Car - 2.5 x 2001 BMW 325i (E46) Car - 2.5 x 2001 BMW 325xi (E46) Car - 2.5 x 2001 BMW 330Ci (E46) Car - 3 x 2001 BMW 330i (E46) Car - 3 x 2001 BMW 330xi (E46) Car - 3 x 2001 BMW 525i (E39) Car - 2.5 x 2001 BMW 530i (E39) Car - 3 x 2001 BMW 540i (E39) Car - 4.4 2001 BMW 740i (E38) Car - 4.4 2001 BMW 740iL (E38) Car - 4.4 2001 BMW 750iL (E38) Car - 5.4 2001 BMW M3 (E46) Car - 3.2 2001 BMW M5 (E39) Car - 5 2001 BMW Z3 (E36/7) Car - 3.2 2001 BMW Z3 (E36/E37) Car - 2.5 x 2001 BMW Z3 (E36/E37) Car - 3 x 2001 BMW Z8 (52) Car - 5 2001 BMW X5 (E53) Truck - 3 x 2001 BMW X5 (E53) Truck - 4.4 2002 BMW 325Ci (E46) Car - 2.5 x 2002 BMW 325i (E46) Car - 2.5 x 2002 BMW 325xi (E46) Car - 2.5 x 2002 BMW 330Ci (E46) Car - 3 x 2002 BMW 330i (E46) Car - 3 x 2002 BMW 330xi (E46) Car - 3 x 2002 BMW 525i (E39) Car - 2.5 x 2002 BMW 530i (E39) Car - 3 x 2002 BMW 540i (E39) Car - 4.4 2002 BMW 745i (E65) Car - 4.4 x 2002 BMW 745Li (E66) Car - 4.4 x 2002 BMW M3 (E46) Car - 3.2 2002 BMW M5 -

BMW Group Pressclub Portal
BMW Group Media information Press Kit BMW Group Production. 10/2014 Contents. Page 1 1. The BMW Group’s strategy: Production follows the market. ............................................. 2 2. Efficient production: Flexibility is the top priority. .................................................. 6 3. Business is people: Our employees drive our success. ........................................ 9 4. One for all – All for one: The BMW Group’s production network. .............................. 13 5. Automotive production: The BMW Group’s vehicle plants. ....................................... 15 6. Engines, components, contract production and motorcycles: The other sites in the BMW Group production network. ..... 20 7. Quality from the outset: How a car is made. ............................................................... 26 8. Sustainability is a given: Clean Production. ................................................................ 30 9. Truly one of a kind: What makes the BMW Group Production unique. ............... 40 10. Industry 4.0: The BMW Group’s vision of the production of the future. .... 46 11. Further information. ............................................................ 52 BMW Group Media information 1. The BMW Group’s strategy: 10/2014 Production follows the market. Page 2 The BMW Group aims at achieving balanced growth in all markets and on all continents. To this end, the BMW Group’s highly efficient, flexible and agile production network applies the principle of ‘production follows the market’. Thanks to its international alignment, the BMW Group Production operates full plants in key markets such as the NAFTA area, China or Europe, which produce vehicles for both the local market and the export. The company continuously monitors and analyzes market developments and customer demands. If trends are changing significantly, the BMW Group can react flexibly by taking the respective product and site decisions. At present, the BMW Group sees the emerging markets in Asia and the Americas as major growth drivers. -
Schedule Integration for Flexray
Schedule Integration for Time-Triggered Systems Outline Motivation • Automotive software • Automotive architectures • Integration Challenge Time-triggered automotive systems • Sychronization • Schedule Integration • FlexRay ILP scheduling approach Case study & Scalability Conclusion 2 Example: Adaptive Cruise Control (AUDI AG, ACC) Florian Sagstetter 3 Distributed Control System Speed Adjustment Radar Actuator System Sensor Network Controller Network ACC ECU Florian Sagstetter 4 Delay Requirements Sensor ts Network m1 Controller tc Network m2 Actuator ta τnetwork τnetwork τcontrol Florian Sagstetter 5 Increasing Complexity in Automotive Electronics 400 350 300 250 240 200 175 150 90 100 100 100 50 13 50 1 3 5 0 Memory [MB] ECUs Sources: Paul Milbredt, AUDI AG, EFTA 2010 - Switched FlexRay: Increasing the Effective Bandwidth and Safety of FlexRay Networks BMW Group, FTF 2010 Orlando - Energy Saving Strategies in Future Automotive E/E Architectures Florian Sagstetter 6 Integration Challenge Application: Implementation: Sender Bus Receiver Mapping, Configuration and Schedule Integration: Defined by: • Message • Timing • Deadline Florian Sagstetter 7 Rising Gap between Required and Actual System Complexity TODAY: INTEGRATION CHALLENGE ? Source: The Software Car: Information and Communication Technology (ICT) as an Engine for the Electromobility of the Future – ForTISS GmbH Florian Sagstetter 8 Paradigm Shift Event-triggered Time-triggered systems systems utilization Ethernet (PTP) flexibility predictability (real-time properties (real-time -

X3 Dealer Specification Guide
The Ultimate Driving Machine THE ALL NEW BMW X5. DEALER SPECIFICATION GUIDE. FROM DECEMBER 2018 PRODUCTION. This specification guide is for business use only and must not be distributed to customers. MODEL OVERVIEW. MRLP* MRLP* excl. GST & LCT incl. GST & LCT X5 xDrive30d xLine Model Code: CV62 Fuel Type: Diesel 8-speed Sport Automatic Consumption: 7.2 l / 100km1 $92,930 $112,990 1 2,993 cc, 6-Cylinder CO2: 189 g / km 195 kW / 620Nm 0-100kmh: 6.5 sec X5 xDrive40i xLine Model Code: CR62 Fuel Type: Petrol 8-speed Sport Automatic Consumption: 9.2 l / 100km1 $95,027 $115,990 1 2,998 cc, 6-Cylinder CO2: 211 g / km 250 kW / 450Nm 0-100kmh: 5.5 sec X5 M50d Model Code: CV02 Fuel Type: Diesel 8-speed Sport Automatic Consumption: 7.5 l / 100km1 $118,741 $149,900 1 2,993 cc, 6-Cylinder CO2: 198 g / km 294 kW / 760Nm 0-100kmh: 5.2 sec 1 Fuel consumption, CO2 emissions data, electrical consumption and range is based upon Combined Driving Test Cycle in accordance with ADR 81/02 on purpose built test vehicles. Actual figures will depend on many factors including traffic conditions, driving habits, prevailing conditions and your vehicle’s equipment, condition and use. These figures should not be expected to be achieved in real world driving conditions and should only be used for comparing one vehicle with another. Please contact your preferred authorised BMW dealer or BMW Group Australia for information on vehicles that are available for sale, and the various specifications and options of vehicles that are available. -

OXYGEN Training CAN CAN-FD Flexray
THE MEASURABLE DIFFERENCE. OXYGEN Training CAN CAN-FD FlexRay © DEWETRON GmbH | June 21 PUBLIC 1 CAN CAN bus available on > TRION-CAN (2/4 buses) > TRION-2402-MULTI (1 bus) > CAN (Control Area Network) is a serial bus system and was > TRION-1802/1600-dLV (1 bus) initiated 1983 by BOSCH and is mainly used in the 21 June > TRION-1820-MULTI (1 bus) > TRION(3)-18x0-MULTI (1 bus) automotive industries > Differential data transmission, CAN-High, CAN-Low ref. to CAN-GND > High Speed CAN (1 Mbaud) for short distances and much data vs. | GmbH DEWETRON © Low Speed CAN (125 kBaud) for long distances and reduced data > Data: 0-8 times 8-bit 2 CAN – CHANNEL SETUP ① In case of TRION-CAN and TRION- 1802/1600-dLV, go to the channel setup ⑥ of the respective CAN channel ① ② In case of TRION-MULTI: CAN bus is 21 June available on AI 1; Turn AI 1 into CAN mode and enable the CAN bus at the bottom of the Channel List ③ Open the CAN channel setup afterwards ② ④ Select the baudrate of the CAN bus © DEWETRON GmbH | GmbH DEWETRON © ⑤ Select Termination True if no termination is applied at the end of the transmission line to apply a 120 Ohm resistance ⑥ If all settings are correct, the frame ④ preview will show the received message ⑤ and the included data bits; ③ ⑤ 3 CAN – CHANNEL SETUP ⑦ Load the proper dbc- or arxml-file ⑧ A channel selection dialog will open; Select either all channels or only certain channels to be decoded and recorded 21 June ⑨ The decoded channels will appear as separate channels in the Channel List ⑦ and contain a preview of the decoded ⑩ signal ⑨ More channels can be selected and decoded by reloading the dbc-file and ⑧ | GmbH DEWETRON © selecting additional channels ⑩ Channels can be deleted by pressing the Clear all button It is also possible to decode the CAN stream offline by recording only the raw CAN stream and perform the steps ⑦ and ⑧ during data analysis 4 CAN – SHOW ONLY ACTIVE MESSAGES ① If Show only active messages is selected, all available messages from the loaded dbc-file with the actual bus traffic will be filtered. -

Prod Wkly 062512.Qxp
Scheduled plant overtime Kia for the week ending June 30 West Point, Ga. truck Subaru Chrysler Group Lafayette, Ind. (Subaru line only) car/truck Jefferson North (Detroit) truck Note: Overtime could be daily, Saturday or both. Saltillo, Mexico truck Toledo (Ohio) Supplier Park truck Toledo (Ohio) North truck Toluca, Mexico car/truck Plant closings Warren, Mich. truck BMW Resumes Windsor, Ontario truck Spartanburg, S.C.‡ July 16 Ford Motor Co. Chrysler Group Kansas City, Mo. (Truck) truck Kentucky Truck (Louisville) truck Sterling Heights, Mich.† July 2 Louisville Assembly truck Ford Motor Co. Starting this week, the BMW X5 and the X6, above, will Ohio Assembly (Avon Lake) truck Kansas City, Mo. (SUV)* mid-2013 Ontario Truck (Oakville) truck not be built while modifications are made to the General Motors Spartanburg, S.C., plant. Production will resume July 16. General Motors Flint, Mich. July 2 Arlington, Texas truck Lansing (Mich.) Grand River† July 9 The BMW X3, also built there, will not be affected. Fort Wayne, Ind. truck Ingersoll, Ontario (CAMI) truck Mistubishi Lansing (Mich.) Delta Township truck Normal, Ill.† July 9 Wentzville, Mo. truck ‡Plant modifications to X5 and X6 assembly area only. Hyundai †Summer vacation *Changeover To get our monthly “Production Line” e-newsletter, Montgomery, Ala. car Source: Automotive News Data Center and company sources go to autonews.com/productionline. North America car and truck production Unless noted vehicles are cars and assembled in the United States. 6/18- 6/1- 1/1- 1/1- 6/18- 6/1- 1/1- -

December 2020 BMW Group Investor Presentation
BMW GROUP INVESTOR PRESENTATION December 2020 BMW Group Investor Presentation, December 2020 Page 1 DYNAMIC STRATEGY. AN ONGOING TASK. POSITION. WHAT do we stand for? DIRECTION. WHAT drives us? STRATEGIC APPROACH. WHERE do we want to go? COOPERATION HOW do we achieve our goals? BMW Group Investor Presentation, December 2020 Page 2 BMW GROUP STRATEGY. WHAT do we stand for? WHERE do we want to go? POSITION. STRATEGIC APPROACH. We take on business, environmental We focus on our customers and and societal challenges. fulfil their diverse needs worldwide. HOW do we achieve WHAT drives us? our goals? DIRECTION COOPERATION. We offer inspiring premium We deliver top performance. products for individual mobility. Each of us makes a contribution, Today and for future generations. based on our values. BMW Group Investor Presentation, December 2020 Page 3 POWER OF CHOICE. OUR CUSTOMERS DECIDE WHAT IS RIGHT FOR THEIR NEEDS. BMW X3. PETROL & DIESEL. BMW X3 xDRIVE 30e. PHEV. BMW iX3. BEV. VARIETY OF DRIVE TRAINS FOR THE BMW X3. BMW Group Investor Presentation, December 2020 Page 4 BMW i FROM “BORN ELECTRIC”. TO “ONE ARCHITECTURE SERVES ALL”. 2013 FROM ONE ARCHITECTURE “BORN ELECTRIC”. 2021 ON. FITS ALL POWERTRAIN DERIVATIVES COMBUSTION ENGINE. PLUG-IN HYBRID. PURE ELECTRIC. AFTER NEW BEV CENTRIC ARCHITECTURE. 2025. BMW Group Investor Presentation, December 2020 Schematic illustration. Page 5 OUR CLEAR ROADMAP. AT LEAST 25 ELECTRIFIED MODELS BY 2023 INCLUDING AT LEAST 13 FULLY ELECTRIC CARS. FULLY ELECTRIC. BMW i3 94 Ah/33 kWh BMW i4* BMW iX1** BMW iX3