BMW. Owner's Manual. BMW X5
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Tokyo Non-Deal Investor Roadshow 15Th January 2019 STRICTLY PRIVATE & CONFIDENTIAL Disclaimer
SIME DARBY BERHAD Tokyo Non-Deal Investor Roadshow 15th January 2019 STRICTLY PRIVATE & CONFIDENTIAL Disclaimer This document is strictly confidential to the recipient. It is being supplied to you solely for your information and may not be reproduced, redistributed or passed on, directly or indirectly, to any other person or published, in whole or in part, for any purpose. Upon request, you shall promptly return this document all other information made available in connection with this document, without retaining any copies. The distribution of this document in other jurisdictions may be restricted by law, and persons into whose possession this document comes should inform themselves about, and observe, any such restrictions. This document does not constitute and is not an offer or invitation to sell, or any solicitation of any offer to subscribe for or purchase any securities of any company referred to in this document in any jurisdiction. The companies referred to herein have not registered and do not intend to register any securities under the US Securities Act of 1933, as amended (the “Securities Act”), and any securities may not be offered or sold in the United States absent registration under the Securities Act or an exemption from registration under the Securities Act. By attending the presentation you will be deemed to represent, warrant and agree that to the extent that you purchase any securities in any of the companies referred to in the presentation, you either (i) are a “qualified institutional buyer” within the meaning of Rule 144A under the Securities Act, or (ii) you will do so in an “offshore transaction” within the meaning of Regulation S under the Securities Act. -

BMW U.S. Media Information Technical Data 2018 BMW X5
BMW U.S. Media Information Technical Data 2018 BMW X5 Sports Activity Vehicle X5 sDrive35i X5 xDrive35i X5 xDrive50i X5 xDrive35d X5 xDrive40e Transmission type automatic automatic automatic automatic automatic Body Seats -- 5 5 5 5 5 Number of Doors -- 5 5 5 5 5 drive type -- RWD AWD AWD AWD AWD Veh. length inch 193.2 193.2 193.2 193.2 193.2 Veh. width inch 76.3 76.3 76.3 76.3 76.3 Width incl mirrors inch 86 86 86 86 86 Veh. height inch 69.4 69.4 69.4 69.4 69.4 Wheelbase inch 115.5 115.5 115.5 115.5 115.5 Overhang front inch 35.9 35.9 35.9 35.9 35.9 Rear overhang inch 41.9 41.9 41.9 41.9 41.9 Ground clearance inch 8.2 8.2 8.2 8.2 8.2 Turning circle ft 41.7 41.7 41.7 41.7 41.7 Legroom front inch 40.4 40.4 40.4 40.4 40.4 Legroom 2nd row inch 36.6 36.6 36.6 36.6 36.6 Shoulder room front inch 60.5 60.5 60.5 60.5 60.5 Shoulder room rear inch 58.3 58.3 58.3 58.3 58.3 Headroom front inch 40.5 40.5 40.5 40.5 40.5 Maximum headroom 2nd row inch 38.8 38.8 38.8 38.8 38.8 Headroom front with moonroof inch 39.8 39.8 39.8 39.8 39.8 Maximum headroom 2nd row with moonroof inch 38.3 38.3 38.3 38.3 38.3 Front Seat Volume ft³ 57.3 57.3 57.3 57.3 57.3 Rear Seat Volume ft³ 47.9 47.9 47.9 47.9 47.9 Approach angle front ° 22.2 22.2 22.2 22.2 22.2 Departure angle rear ° 20.4 20.4 20.4 20.4 20.4 Ramp angle ° 17.3 17.3 17.3 17.3 17.3 Axle clearance front inch 7.2 7.2 7.2 7.2 7.2 Axle clearance rear inch 7.6 7.6 7.6 7.6 7.6 fording depth (without auxiliary heating) inch 19.7 19.7 19.7 19.7 19.7 climbing ability % 50 50 50 50 50 climbing ability starting % 32 32 32 32 32 Press Trunk volume (SAE) ft³ 35.8-76.7 35.8-76.7 35.8-76.7 35.8-76.7 34.2-72.5 US Tank capacity - series gal 22.4 22.4 22.4 22.4 22.4 Weight distribution front / rear (empty car) % 47.9 / 52.1 49.1 / 50.9 50 / 50 50.4 / 49.6 45.8 / 54.2 US Curb weight lbs 4625 4735 5095 4875 5220 Engine Engine type -- N55B30M0 N55B30M0 N63B44O1 N57D30O1 N20B20O0 Cylinders -- 6 6 8 6 4 Valves p.cyl. -

BMW Recall 21V-Xxx: Brake Disc Date: Friday, February 12, 2021 11:32:54 AM
From: Broadcast Messaging System To: DL-BMS_Message_Monitors Subject: BMW Recall 21V-xxx: Brake Disc Date: Friday, February 12, 2021 11:32:54 AM Publish Date: February 12, 2021 DCSnet Message From: Technical Service Expiration Date: February 26, 2021 Urgent Subject: BMW Recall 21V-xxx: Brake Disc BMW AG is conducting a Voluntary Safety Recall (effective February 12, 2021) on a small number of Model Year 2021 BMW vehicles that were produced between January 27, 2021 and February 10, 2021. Please see attached for additional information. The bulletin will be updated when additional information becomes available. Sincerely, Technical Service Attachments: B340321_Recall_Notice[821fd91a].pdf B340321[821fd919].pdf B340321_2021-BMW-MY2021-Gxx-BrakeDisc-FAQ-(18Feb2021) [821fd918].pdf B340321_Recall_Notice[821fd91a].pdf B340321[821fd919].pdf B340321_2021-BMW-MY2021-Gxx-BrakeDisc-FAQ-(18Feb2021) [821fd918].pdf Recipients: BMW SAV (Light Trucks), All Offerings, All Regions, All Areas, All Departments, All Personnel BMW Passenger Cars, CC-All, CC-All BMW Passenger Cars, All Offerings, All Regions, All Areas, All Departments, All Personnel 2/15/2021 34 03 21_RECALL 21V-XXX: BRAKE DISC SIB 34 03 21 2021-02-12 RECALL 21V-XXX: BRAKE DISC MODEL E-Series Model Description Production Date G05 X5 Sports Activity Vehicle February 6, 2021 – February 10, 2021 G12 7 Series Sedan January 28, 2021 – February 5, 2021 G14 8 Series Convertible February 3, 2021 – February 5, 2021 G16 8 Series Gran Coupe February 4, 2021 G20 3 Series Sedan January 27, 2021 – February 3, 2021 G22 4 Series Coupe January 27, 2021 – February 5, 2021 G23 4 Series Convertible January 27, 2021 – February 5, 2021 G29 Z4 Roadster January 29, 2021 – February 3, 2021 G30 5 Series Sedan January 28, 2021 – February 5, 2021 AFFECTED VEHICLES Vehicles which require this Recall Campaign to be completed will show it as “Open” when checked either in AIR, the "Service Menu" of DCSnet (Dealer Communication System), ISPA Next or Warranty Vehicle Inquiry. -

The X5 Price List January 2021 the All-New Bmw X5
THE X5 PRICE LIST JANUARY 2021 THE ALL-NEW BMW X5. The moment you lay eyes on the all-new BMW X5, you’ll be struck by its commanding presence – high and handsome, powerful and elegant. The one-piece double kidney grille hints at what will happen when it takes a deep breath, and the honed X design of the headlights leaves no doubt as to who will take the lead. Equipped with the latest technologies for more safety and maximum driving dynamics on every surface, the all-new BMW X5 says you’ve arrived, even before you get there. The BMW X5. Know you can. BMW EFFICIENT DYNAMICS EfficientDynamics is BMW’s award-winning programme of technologies designed to reduce CO2 emissions and improve fuel economy, without comprising on performance or driving dynamics. These technologies are standard on every new BMW and could lower your fuel and tax costs, as well as well as offering additional benefits for those on company car plans. You can find out more about the benefits of BMW EfficientDynamics, as well as compare your own vehicle against the BMW X5 by clicking here. Auto Start/Stop Brake Energy ECO PRO function Regeneration Mode Optimum BMW Shift EfficientLightWeight Indicator Personalise and buy your perfect BMW online. Find out more at buy.bmw.co.za HIGHLIGHTS. EXTERIOR INTERIOR New design language exudes robust assurance and authority. Optimised power distribution thanks to BMW xDrive and an Clear design and exclusive ambience. New BMW Live Cockpit Professional display and control system electronically controlled differential lock at the rear axle. -

Picture TRE NO. OEM NO. TM19515 11517805192 11518512234
Picture Car TRE NO. OEM NO. BMW 1 (E81) 03.07-09.12 BMW 1 Coupe (E82) 10.07- BMW 1 Convertible (E88) 09.08- BMW 3 (E90) 07.09-12.11 BMW 3 Touring (E91) 09.09- BMW 3 Coupe (E92) 03.07- BMW 3 Convertible (E93) 01.10- 11517805192 BMW 5 (E60) 09.07-03.10 TM19515 BMW 5 Touring (E61) 09.07- 11518512234 BMW 5 GRAN TURISMO (F07) 09.10- BMW 7 (F01, F02, F03, F04) 09.09- BMW X1 (E84) 10.09- BMW X3 (F25) 09.10- BMW X5 (E70) 09.10- BMW X6 (E71, E72) 09.10- BMW 3 (E36) 07.93-02.98 BMW 3 Compact (E36) 03.94-08.00 BMW 3 Coupe (E36) 09.93-04.99 BMW 3 Convertible (E36) 01.94-04.99 11531722531 BMW 3 Touring (E36) 01.95-10.99 WOC19514 BMW 5 (E34) 08.89-09.95 11531722853 BMW 5 Touring (E34) 09.94-01.97 BMW Z3 (E36) 10.95-10.98 BMW Z3 Coupe (E36) 06.01-06.03 BMW 5 (E39) 520i/523i/528i 11.95-09.00 BMW 5 Touring 520i/523i528i 01.97-09.00 WOC19812 11531740478 BMW 7 (E38) 728i/il 08.95-11.01 BMW 5 (E34) 530i V8/540i V8 09.92-09.95 BMW 5 Touring (E34) 530i V8/540i 09.92-01.97 BMW 7 (E32) 730i/740i 04.92-09.94 WOC19811 11531720173 BMW 7 (E38) 730i/740i 10.94-11.01 BMW 3 Compact (E36) 03.94-08.00 11531739752 BMW 3 (E36) 07.93-02.98 BMW 3 Coupe (E36) 09.93-04.99 11531739755 BMW 3 Convertible (E36) 01.94-04.99 11531247125 WOC19512 BMW 3 Touring (E36) 07.95-10.99 1739.755 BMW 5 (E34) 08.89-09.95 BMW 5 Touring (E34) 09.94-01.97 11531432881 BMW Z3 (E36) 10.95-10.98 11531743544 BMW 3 Compact (E36) 03.94-08.00 BMW 3 (E36) 07.93-02.98 BMW 3 Coupe (E36) 09.93-04.99 11531739208 BMW 3 Convertible (E36) 01.94-04.99 WOC19511 11531743679 BMW 3 Touring (E36) 07.95-10.99 BMW 5 (E34) 08.89-09.95 BMW 5 Touring (E34) 09.94-01.97 Picture Car TRE NO. -

2011 X5 M X6 M Technical Data Oct2010
BMW U.S. Media Information Contacts: Thomas Plucinsky Product & Technology Communications Manager 201-307-3783 / [email protected] David J. Buchko Advanced Powertrain & Heritage Communications 201-307-3709 / [email protected] Matthew Russell BMW Product & Technology Communications Tel. 201-307-3755 [email protected] Technical Data. 2011 BMW X5 M and X6 M. X5 M X6 M Sport Activity Vehicle Sports Activity Coupe 10.01.2010 Automatic 6 Speed Automatic 6 Speed Body No of doors / seats - 5 / 5 5 / 4 Vehicle length mm / inch 4851 / 191 4876 / 192 Vehicle width mm / inch 1994 / 78.5 1983 / 78.1 Vehicle height, unloaded mm / inch 1764 / 69.4 1684 / 66.3 Wheelbase mm / inch 2933 / 115.5 2933 / 115.5 Turning cicle m / ft 12.8 / 42.0 12.8 / 42.0 Track, front mm / inch 1660 / 65.4 1660 / 65.4 Track, rear mm / inch 1672 / 65.8 1672 / 65.8 Width at shoulderheight, front mm / inch 1523 / 60 1521 / 59.9 Width at shoulderheight, rear mm / inch 1474 / 58 1448 / 57.0 Eff leg room, front mm / inch 1015 / 40.0 1025 / 40.4 Eff leg room, rear mm / inch 929 / 36.6 912 / 35.9 Eff head room, front mm / inch 998 / 39.3 973 / 38.3 Eff head room, rear mm / inch 991 / 39.0 946 / 37.2 Trunk volume acc SAE1100 ft³ 35.8/75.2 25.6/59.7 Approx tank capacity L / gal 85 / 22.5 85 / 22.5 Unladen weight kg / lbs 2435 / 5368 2415 / 5324 Weight distribution Front/Rear % 51.7 / 48.3 52.4 / 47.6 Gross vehicle weight kg / lbs 2935 / 6471 2840 / 6261 Payload kg / lbs 500 / 1102 425 / 937 Axle load limit, front kg / lbs 1430 / 3153 1430 / 3153 Axle load limit, -

The New Bmw X5
The Ultimate Driving Machine THE NEW BMW X5. BMW EFFICIENTDYNAMICS. LESS EMISSIONS. MORE DRIVING PLEASURE. THE NEW BMW X5. 18 Equipment highlights 20 Exterior colours 22 Interior colours 24 Wheels and tyres EVERYTHING. MULTIPLIED BY X. A CHALLENGE. TO ALL THE OTHERS. ENTRY AT THE HIGHEST LEVEL. ABSOLUTE CONTROL. DOESN’T ASK, JUST ACTS. ALWAYS LOOKING AHEAD. POWERFUL PRESENCE IN EXTERIOR DESIGN FORWARD-LOOKING APPEARANCE WITH STRIKING SIDE CONTOUR || OPTIONAL BMW LASERLIGHTS WITH ILLUMINATED X SIGNATURE || A CHOICE OF OPTIONAL 22" LIGHT ALLOY WHEELS (STANDARD FOR M5d). ADVANCED DRIVER ASSISTANCE AND CONNECTIVITY DRIVING ASSISTANT PROFESSIONAL OPTION SUPPORTS EXTENSIVE SAFETY AND COMFORT FEATURES || CUSTOMISABLE BMW LIVE COCKPIT PROFESSIONAL WITH TWO 12.3" DISPLAYS. LUXURIOUS AND COMFORTABLE WELCOME LIGHT CARPET || AMBIENT LIGHTING WITH DYNAMIC FUNCTION || OPTIONAL SKY LOUNGE PANORAMIC GLASS SUNROOF || MARK GOALS AUTOMATIC TAILGATE. OUTSTANDING DRIVING DYNAMICS ON ANY SURFACE BMW xDRIVE || ADAPTIVE TWO-AXLE AIR SUSPENSION FOR xLINE AND M SPORT MODELS || ADAPTIVE M SUSPENSION FOR M5d || OPTIONAL xOFFROAD PACKAGE AND INTEGRAL WITH AN X. ACTIVE STEERING || ACTIVE AIR STREAM KIDNEY GRILLE || EFFICIENT LIGHTWEIGHT. KNOW YOU CAN – THE NEW BMW X5. Equipment 18 | 19 EQUIPMENT HIGHLIGHTS. Standard equipment Optional equipment In laser high-beam mode, BMW Laserlights are a unique X design that BMW Live Cockpit Professional consists of a 12.3" Control Display and Ambient light creates a relaxed lighting atmosphere and includes a Enhanced Bluetooth with The harman/kardon illuminate a range of up to 5m, nearly twice as far as that of conventional a fully digital 12.3" instrument display. choice of six pre-designed light designs including dynamic function. -

BMW X5 E70 IHKA to IHKA with FKA (4-Zone Climate Control)
BMW X5 E70 IHKA to IHKA with FKA (4‐zone climate control) Do it yourself retrofit Mechanical parts listing....(searched with some success on E‐bay and then found a place in Laredo, Texas for the remaining BMW Parts Inc.) Rear Seat Console Blower Motor Fan HVAC Heat AC Unit: 64116947554 Dash to rear A/C heater air vent rear duct: 64226958743 Fresh rear air vent center grill: 6954954 Rear console climate control trim panel: 6954957 Interior pocket tray trim panel (if NO rear DVD player): 6963379 Bracket for rear blower (VERY IMPORTANT): 64116947555 FKA Rear air conditioning control unit: 64119215514 Rear Seat Console Blower regulator & heater, rear blower: 64116949645 Left driver side rear heat floor Vent: 64116954487 Right passenger side rear heat floor Vent: 64116954488 Left driver side B pillar air duct channel: 51477148533 Right passenger side B pillar air duct channel: 51477148534 Left driver side B pillar lower air duct channel trim cover: 6963457 Right passenger side B pillar lower air duct channel trim cover: 6963458 Foam floor insert, rear left: 51476954933 Foam floor insert, rear right: 51479137764 Electrical parts listing.... 5amp mini fuse x1 15amp ATO regular fuse x1 30amp ATO regular fuse x2 Wiring harness from donor vehicle (with S4NBA option) to remove necessary wires and connectors to create a secondary wiring harness for rear climate controls. ‐‐Front seat removal. ‐‐WHILE BATTERY IS CONNECTED, remove seat rail to floor bolt plastic covers and bolts (2 each side, ahead and behind each seat). This requires moving the seats forwards and backwards for access. ****DISCONNECT BATTERY and only AFTER BATTERY IS DISCONNECTED remove electric seat/seat air bag connectors!!!**** Remove 4 torx seat bolts (2 each side, ahead and behind each seat) from the vehicle with seat belts attached.....move seats out of the vehicle, short "leash" distance away, but very “doable” without having to disconnect seat belt mounting bolts from mounts. -

BMW U.S. Media Information Technical Data 2017 BMW X5
BMW U.S. Media Information Technical Data 2017 BMW X5 Sports Activity Vehicle X5 sDrive35i X5 xDrive35i X5 xDrive50i X5 xDrive35d X5 xDrive40e Transmission type automatic automatic automatic automatic automatic Body Seats -- 5 5 5 5 5 Number of Doors -- 5 5 5 5 5 drive type -- RWD AWD AWD AWD AWD Veh. length inch 193.2 193.2 193.2 193.2 193.2 Veh. width inch 76.3 76.3 76.3 76.3 76.3 Width incl mirrors inch 86 86 86 86 86 Veh. height inch 69.4 69.4 69.4 69.4 69.4 Wheelbase inch 115.5 115.5 115.5 115.5 115.5 Overhang front inch 35.9 35.9 35.9 35.9 35.9 Rear overhang inch 41.9 41.9 41.9 41.9 41.9 Ground clearance inch 8.2 8.2 8.2 8.2 8.2 Turning circle ft 41.7 41.7 41.7 41.7 41.7 Legroom front inch 40.4 40.4 40.4 40.4 40.4 Legroom 2nd row inch 36.6 36.6 36.6 36.6 36.6 Shoulder room front inch 60.5 60.5 60.5 60.5 60.5 Shoulder room rear inch 58.3 58.3 58.3 58.3 58.3 Headroom front inch 40.5 40.5 40.5 40.5 40.5 Maximum headroom 2nd row inch 38.8 38.8 38.8 38.8 38.8 Headroom front with moonroof inch 39.8 39.8 39.8 39.8 39.8 Maximum headroom 2nd row with moonroof inch 38.3 38.3 38.3 38.3 38.3 Front Seat Volume ft³ 57.3 57.3 57.3 57.3 57.3 Rear Seat Volume ft³ 47.9 47.9 47.9 47.9 47.9 Approach angle front ° 22.2 22.2 22.2 22.2 22.2 Departure angle rear ° 20.4 20.4 20.4 20.4 20.4 Ramp angle ° 17.3 17.3 17.3 17.3 17.3 Axle clearance front inch 7.2 7.2 7.2 7.2 7.2 Axle clearance rear inch 7.6 7.6 7.6 7.6 7.6 fording depth (without auxiliary heating) inch 19.7 19.7 19.7 19.7 19.7 climbing ability % 50 50 50 50 50 climbing ability starting % 32 32 -

Flexray Static Segment Scheduling
FlexRay Static Segment Scheduling Martin Lukasiewycz, Michael Glaß, Jurgen¨ Teich, and Paul Milbredt 1 Introduction The FlexRay protocol was introduced by an international consortium including sev- eral car manufacturers to cope with growing real-time requirements of advanced driver assistance functions and safety functions in the automotive domain. The FlexRay protocol offers a static and dynamic segment with a high data rate of 10 Mbit/s. While the event-triggered dynamic segment is used mainly for diagno- sis, maintenance, and calibration data, the time-triggered static segment might be used for critical data with strict real-time requirements. In addition to standard lin- ear bus and star topologies, the FlexRay bus allows hybrid topologies including a dual channel mode to increase the reliability. However, in contrast to the prevail- ing CAN bus [4] in the automotive domain, the configuration of the FlexRay bus is significantly more complex: It requires a large set of parameters and a predefined schedule. This chapter introduces a scheduling concept for the static segment of the FlexRay based on the transformation to a two-dimensional bin packing problem. Martin Lukasiewycz TU Munich, Germany, e-mail: [email protected] Michael Glaß University of Erlangen-Nuremberg, Germany, e-mail: [email protected] Jurgen¨ Teich University of Erlangen-Nuremberg, Germany, e-mail: [email protected] Paul Milbredt AUDI AG, Germany, e-mail: [email protected] 1 2 Martin Lukasiewycz, Michael Glaß, Jurgen¨ Teich, and Paul Milbredt 1.1 FlexRay Protocol The FlexRay communication is organized in cycles, as illustrated in Figure 1. -

BMW PHEV Faqs Gear up for Client Questions
BMW PHEV FAQs Gear Up for Client Questions BMW plug-in hybrid vehicles (PHEV) consist of a powerful electric motor and an efficient combustion engine that work in tandem for ultimate performance. BMW 330e (sDrive and xDrive) BMW 530e (sDrive and xDrive) BMW 745e xDrive BMW X5 xDrive45e BMW X3 30e General Q: Where is my tachometer? A: A simple tachometer could not do the job as we have to take into account the gas engine and the electric motor that run at different speeds. So instead of a tachometer, you’ll see a power meter that shows you how much power you are using at the moment, and how much power you have left. This power meter shows you the combined possible output of the gasoline engine and the electric motor in one gauge. Q: How do the different drive modes work? A: You can determine combinations between “drive modes” (e.g. Sport, Hybrid, Electric) and Battery Control — on the 330e, 530e, 745e and X5 45e to tailor the vehicle’s behavior to your needs. For the X3 30e, the eDrive button switches between Auto e, Max eDrive and SAVE Battery. • Hybrid (default setting): This is the most efficient setting, with both the engine and electric motor working efficiently in tandem. The intelligent operating strategy determines the most efficient drive combination at all times and switches to it automatically. On the X3 30e, a similar mode is called “Auto e” • Electric (all-electric driving mode): The vehicle is powered solely by the electric motor. This mode is designed for comfortable driving with zero local emissions without the engine being started. -
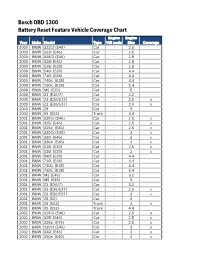
OBD 1300 Battery Reset Vehicle Coverage Chart
Bosch OBD 1300 Battery Reset Feature Vehicle Coverage Chart Engine Engine Year Make Model Type VIN code Size Coverage 2000 BMW 323Ci (E46) Car - 2.5 2000 BMW 323i (E46) Car - 2.5 2000 BMW 328Ci (E46) Car - 2.8 2000 BMW 328i (E46) Car - 2.8 2000 BMW 528i (E39) Car - 2.8 2000 BMW 540i (E39) Car - 4.4 2000 BMW 740i (E38) Car - 4.4 2000 BMW 740iL (E38) Car - 4.4 2000 BMW 750iL (E38) Car - 5.4 2000 BMW M5 (E39) Car - 5 2000 BMW Z3 (E36/7) Car - 3.2 2000 BMW Z3 (E36/E37) Car - 2.5 x 2000 BMW Z3 (E36/E37) Car - 2.8 x 2000 BMW Z8 Car - 5 2000 BMW X5 (E53) Truck - 4.4 2001 BMW 325Ci (E46) Car - 2.5 x 2001 BMW 325i (E46) Car - 2.5 x 2001 BMW 325xi (E46) Car - 2.5 x 2001 BMW 330Ci (E46) Car - 3 x 2001 BMW 330i (E46) Car - 3 x 2001 BMW 330xi (E46) Car - 3 x 2001 BMW 525i (E39) Car - 2.5 x 2001 BMW 530i (E39) Car - 3 x 2001 BMW 540i (E39) Car - 4.4 2001 BMW 740i (E38) Car - 4.4 2001 BMW 740iL (E38) Car - 4.4 2001 BMW 750iL (E38) Car - 5.4 2001 BMW M3 (E46) Car - 3.2 2001 BMW M5 (E39) Car - 5 2001 BMW Z3 (E36/7) Car - 3.2 2001 BMW Z3 (E36/E37) Car - 2.5 x 2001 BMW Z3 (E36/E37) Car - 3 x 2001 BMW Z8 (52) Car - 5 2001 BMW X5 (E53) Truck - 3 x 2001 BMW X5 (E53) Truck - 4.4 2002 BMW 325Ci (E46) Car - 2.5 x 2002 BMW 325i (E46) Car - 2.5 x 2002 BMW 325xi (E46) Car - 2.5 x 2002 BMW 330Ci (E46) Car - 3 x 2002 BMW 330i (E46) Car - 3 x 2002 BMW 330xi (E46) Car - 3 x 2002 BMW 525i (E39) Car - 2.5 x 2002 BMW 530i (E39) Car - 3 x 2002 BMW 540i (E39) Car - 4.4 2002 BMW 745i (E65) Car - 4.4 x 2002 BMW 745Li (E66) Car - 4.4 x 2002 BMW M3 (E46) Car - 3.2 2002 BMW M5