Tennis Boundary Ball Detection ECE 445 Fall 2016 Design Review Team 12
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

T7lb Ilh W=1~ IA F I
L;L 7 T7lb Ilh W=1~ IA F I NEWSPAPER OF THE UNDERGRADUATES_ OF THE MASSACHUSETTS INSTITUTE__ OF TECHNOLOGY .V0L. LXXX No. 18I8 CAMBRIDGE, MASSACHUSETTS, FRIDAY, APRIL 29, 1960 $ Cents Dorm tories and Fraternitzes s Drs. Wiesner, Luris of MIT Elected To !iPlan Full and Festive Weekerads National Academy of Sciences; Total Now 36 The apex of the Tech social season will come on May 6 and 7 with the IFC Two of MIT's most distinguished faculty members have just been elected to membership in the National Acad- and Dormitory Weekends. All Tech students are invited by Henry McCCarl, Co- emy of Sciences, the highest honor in American science. `Chairman of the Dorm Weekend, and Bob Dulsky, Chairman of the IF(C Week- The new members are Dr. Jerome B. Wiesner, dilrector of thle Research Laboratory of Electronics, and Dr. Sal- ,end to bring their dates and have "an especially good time." vador E. Luris, international authority on viruses and genetics. Dorm Weekend begins on Friday night, May 6, with cocktail paarties in With their election, MIT now has a total of 36 faculty and corporation member s who are members of the Nation- Talbot Lounge in East Campus. A semi formal dance will highlight the eve- al Academy. ning in The Parker House, spirited by music from the lively Jerry Daviss Combo. Dr. Wiesner received his doctoral degree in 1950 flrom the Univelrsity of Michigan, where he assisted in devel- Saturday afternoon, students and their dates are invited to attend a Beach oping modern electronic techniques for speech correction. -

GLYNN COUNTY GEORGIA Saint Simons Tennis Court Resurfacing
Glynn County BOC Saint Simons Tennis Court Resurfacing IFB #01186 GLYNN COUNTY GEORGIA Saint Simons Tennis Court Resurfacing PROJECT 2021 INVITATION FOR BID IFB #01186 BIDS DUE: January 6, 2021 1 | Page Glynn County BOC Saint Simons Tennis Court Resurfacing IFB #01186 Table of Contents INVITATION FOR BID ............................................................................................................................................................... 3 INSTRUCTION TO BIDDERS ...................................................................................................................................................... 4 GENERAL TERMS AND CONDITIONS ....................................................................................................................................... 8 BID FEE SHEET ....................................................................................................................................................................... 55 REPRESENTATION ................................................................................................................................................................. 59 GEORGIA SECURITY AND IMMIGRATION CONTRACTOR AFFIDAVIT..................................................................................... 61 GEORGIA SECURITY AND IMMIGRATION SUBCONTRACTOR AFFIDAVIT .............................................................................. 63 EQUAL EMPLOYMENT OPPORTUNITY (EEO) PRACTICE ....................................................................................................... -

Tennis Courts: a Construction and Maintenance Manual
DOCUMENT RESUME ED 433 677 EF 005 376 TITLE Tennis Courts: A Construction and Maintenance Manual. INSTITUTION United States Tennis Court & Track Builders Association.; United States Tennis Association. PUB DATE 1998-00-00 NOTE 246p.; Colored photographs may not reproduce clearly. AVAILABLE FROM U.S. Tennis Court & Track Builders Association, 3525 Ellicott Mills Dr., Suite N., Ellicott City, MD 21043-4547. Tel: 410-418-4800; Fax: 410-418-4805; Web site: <http://www.ustctba.com>. PUB TYPE Guides - Non-Classroom (055) -- Reports Descriptive (141) EDRS PRICE MF01/PC10 Plus Postage. DESCRIPTORS *Construction (Process); *Facility Guidelines; Facility Improvement; Facility Planning; *Maintenance; *Tennis IDENTIFIERS *Athletic Facilities ABSTRACT This manual addresses court design and planning; the construction process; court surface selection; accessories and amenities; indoor tennis court design and renovation; care and maintenance tips; and court repair, reconstruction, and renovation. General and membership information is provided on the U.S. Tennis Court and Track Builders Association and the U.S. Tennis Association, along with lists of certified tennis court builders and award winning tennis courts from past years. Numerous design and layout drawings are also included, along with Tennis Industry Magazine's maintenance planner. Sources of information and a glossary of terms conclude the manual. (GR) ******************************************************************************** Reproductions supplied by EDRS are the best that can be made -
Project Physics Reader 4, Light and Electromagnetism
DOM/KEITRESUME ED 071 897 SE 015 534 TITLE Project Physics Reader 4,Light and Electromagnetism. INSTITUTION Harvard 'Jail's, Cambridge,Mass. Harvard Project Physics. SPONS AGENCY Office of Education (DREW), Washington, D.C. Bureau of Research. BUREAU NO BR-5-1038 PUB DATE 67 CONTRACT 0M-5-107058 NOTE . 254p.; preliminary Version EDRS PRICE MF-$0.65 HC-49.87 DESCRIPTORS Electricity; *Instructional Materials; Li ,t; Magnets;, *Physics; Radiation; *Science Materials; Secondary Grades; *Secondary School Science; *Supplementary Reading Materials IDENTIFIERS Harvard Project Physics ABSTRACT . As a supplement to Project Physics Unit 4, a collection. of articles is presented.. in this reader.for student browsing. The 21 articles are. included under the ,following headings: _Letter from Thomas Jefferson; On the Method of Theoretical Physics; Systems, Feedback, Cybernetics; Velocity of Light; Popular Applications of.Polarized Light; Eye and Camera; The laser--What it is and Doe0; A .Simple Electric Circuit: Ohmss Law; The. Electronic . Revolution; The Invention of the Electric. Light; High Fidelity; The . Future of Current Power Transmission; James Clerk Maxwell, ., Part II; On Ole Induction of Electric Currents; The Relationship of . Electricity and Magnetism; The Electromagnetic Field; Radiation Belts . .Around the Earth; A .Mirror for the Brain; Scientific Imagination; Lenses and Optical Instruments; and "Baffled!." Illustrations for explanation use. are included. The work of Harvard. roject Physics haS ...been financially supported by: the Carnegie Corporation ofNew York, the_ Ford Foundations, the National Science Foundation.the_Alfred P. Sloan Foundation, the. United States Office of Education, and Harvard .University..(CC) Project Physics Reader An Introduction to Physics Light and Electromagnetism U S DEPARTMENT OF HEALTH. -

December 2018 Meeting Documents 3
AMENDED AND RESTATED LICENSE AGREEMENT BETWEEN SPORTIME CLUBS, LLC FKA ISLAND TENNIS, L.P. d/b/a SPORTIMESM AND RANDALL’S ISLAND PARK ALLIANCE, INC. FKA RANDALL’S ISLAND SPORTS FOUNDATION, INC. AND CITY OF NEW YORK PARKS & RECREATION for CONSTRUCTION, EXPANSION, RENOVATION, OPERATION, MAINTENANCE AND MANAGEMENT OF A YEAR-ROUND TENNIS FACILITY AT RANDALL’S ISLAND PARK MANHATTAN, NEW YORK M104-IT DATED: , 2018 TABLE OF CONTENTS TITLE PAGE GRANT OF LICENSE ................................................................................................................................................ 2 DEFINITIONS ............................................................................................................................................................. 3 TERM OF LICENSE .................................................................................................................................................. 9 PAYMENT TO RIPA ............................................................................................................................................... 17 RIGHT TO AUDIT ................................................................................................................................................... 25 CAPITAL IMPROVEMENTS ................................................................................................................................. 25 ALTERATIONS ....................................................................................................................................................... -

Intelligent Design with Chromogenic Materials
Journal of the International Colour Association (2014): 13, 54-66 Ferrara & Bengisu Intelligent design with chromogenic materials Marinella Ferrara1 and Murat Bengisu2 1Design Department, Politecnico di Milano, Italy 2Department of Industrial Design, Izmir University of Economics, Turkey Emails: [email protected]; [email protected] This paper introduces the new qualitative dimensions that smart materials bring in industrial and product design with the aim of stimulating designers to take a more proactive attitude in the choice and application of these materials. Chromogenic materials enable designers to make visible, by emitting colour signals, what is happening under certain environmental conditions, normally invisible to our eyes. This allows the increase of comfort and safety of the designed environment. The possibility to create kinetic elements and dynamic products that change their expression over time allows design to contribute to a pleasant user-product interaction. Received 2 July 2014; accepted 24 July 2014 Published online: 8 December 2014 Introduction Various reports on key technologies for the near future address the critical role that will be played by smart materials. Smart materials and systems are expected to play a key role in the improvement of quality of life, productivity, economic welfare, and sustainability. The implementation of smart materials is usually intertwined with other critical technologies such as nanotechnology, new manufacturing processes, microelectronics, robotics, and biotechnology [1-3]. Many smart material solutions have already been commercialised successfully. Self-cleaning textiles, self-healing components for construction, smart drug delivery, and smart windows are some examples [2,4]. 54 http://www.aic-colour-journal.org/ ISSN 2227-1309 Journal of the International Colour Association (2014): 13, 54-66 Ferrara & Bengisu At the current moment of promising smart material applications, it is necessary to prevent the trivialisation of this radical innovation. -
Scrapping the Pain of Wrong Decisions
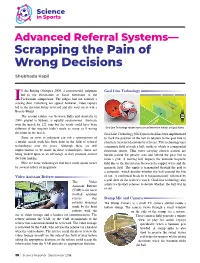
Science in Sports Advanced Referral Systems— Scrapping the Pain of Wrong Decisions Shubhada Kapil N the Beijing Olympics 2008, a controversial judgment Goal Line Technology led to the elimination of Sarah Stevenson in the ITaekwondo competition. The judges had not counted a scoring shot. Following her appeal, however, video replays led to the decision being reversed and she went on to win a Bronze Medal. The second cricket test between India and Australia in 2008, played in Sydney, is equally controversial. Australia won the match by 122 runs but the result could have been different if the umpires hadn’t made as many as 9 wrong Goal Line Technology system based around sensors in the ball and goal frame decisions in the match. Goal Line Technology (GLT) in football has been implemented Since an error in judgment can rob a sportsperson of to track the position of the ball in relation to the goal line to a medal, much work has been done in the field of referral eliminate incorrect decisions by referees. This technology uses technologies over the years. Although there are still a magnetic field to track a ball, inside of which is a suspended improvements to be made in these technologies, these are electronic sensor. Thin wires carrying electric current are being looked upon as an advantage as they promote correct buried around the penalty area and behind the goal line to decision making. form a grid. A moving ball impacts the uniform magnetic Here are some technologies that have made sports richer field due to the interference between the copper wires and the by several orders of magnitude. -

December 2018 Meeting Documents 1
CITY OF NEW YORK FRANCHISE AND CONCESSION REVIEW COMMITTEE (Cal. No. __ ) RESOLVED, that the Franchise and Concession Review Committee (“FCRC”) hereby approves and authorizes the New York City Department of Parks & Recreation (“Parks”) to utilize a different procedure, pursuant to Section 1-16 of the Concession Rules of the City of New York, to enter into an amended and restated license agreement (“License Agreement”) between the City of New York, acting by and through the Department of Parks & Recreation (“Parks”); and Randall’s Island Park Alliance, Inc. (“RIPA”), formerly known as Randall’s Island Sports Foundation. Inc.; and Sportime Clubs LLC, formerly known as Island Tennis L.P., d/b/a Sportime (“Sportime”), for the construction, expansion, renovation, operation, maintenance, and management of a year-round tennis facility at Randall’s Island Park, Manhattan. The License Agreement, among other things, provides for the renovation and expansion of the current Licensed Premises to include, after construction, ten (10) additional full-size tennis courts adjacent to the current Licensed Premises, and related amenities, and extends the term by twenty-five (25) years from the date the expanded facility opens. Compensation under the License Agreement will be as follows: Until the August 31st immediately following the Effective Date, Sportime shall pay to RIPA license fees consisting of the higher of a minimum annual fee of Three Hundred Thirty-Three Thousand Nine Hundred Twenty-Three Dollars ($333,923), or the sum of twenty percent (20%) of Gross Receipts derived from Permitted Sponsorship Activity plus ten percent (10%) of all other Gross Receipts. From the September 1st immediately following the Effective Date until the Phase II Commencement Date, Sportime shall pay to RIPA license fees consisting of the higher of a minimum annual fee of Five Hundred Thousand Dollars ($500,000), or the sum of twenty percent (20%) of Gross Receipts derived from Permitted Sponsorship Activity plus ten percent (10%) of all other Gross Receipts. -

Stand Up, Fight Back!
Stand Up, Fight Back! The Stand Up, Fight Back campaign is a way for Help Support Candidates Who Stand With Us! the IATSE to stand up to attacks on our members from For our collective voice to be heard, IATSE’s members anti-worker politicians. The mission of the Stand Up, must become more involved in shaping the federal legisla- Fight Back campaign is to increase IATSE-PAC con- tive and administrative agenda. Our concerns and inter- tributions so that the IATSE can support those politi- ests must be heard and considered by federal lawmakers. cians who fight for working people and stand behind But labor unions (like corporations) cannot contribute the policies important to our membership, while to the campaigns of candidates for federal office. Most fighting politicians and policies that do not benefit our prominent labor organizations have established PAC’s members. which may make voluntary campaign contributions to The IATSE, along with every other union and guild federal candidates and seek contributions to the PAC from across the country, has come under attack. Everywhere from Wisconsin to Washington, DC, anti-worker poli- union members. To give you a voice in Washington, the ticians are trying to silence the voices of American IATSE has its own PAC, the IATSE Political Action Com- workers by taking away their collective bargaining mittee (“IATSE-PAC”), a federal political action commit- rights, stripping their healthcare coverage, and doing tee designed to support candidates for federal office who away with defined pension plans. promote the interests of working men and women. The IATSE-PAC is unable to accept monies from Canadian members of the IATSE. -
2018Wttrulesguide.Pdf
2018 WORLD TEAMTENNIS OFFICIAL RULES GUIDE 1 2018 WORLD TEAMTENNIS OFFICIAL RULES GUIDE PHOTOS: Fred & Susan Mullane/CAMERAWORK USA The World TeamTennis Official Rules Guide is published by World TeamTennis, LLC 247 W. 30th St 5th floor New York, NY 10001 All contents in this guide are copyrighted 2018 by World TeamTennis, LLC. Reproduction of any portion of the World TeamTennis Official Rules Guide is not permitted without prior written consent of World TeamTennis. World TeamTennis, LLC Mark Ein, Co-Owner/Chairman Fred Luddy, Co-Owner Billie Jean King, Co-Founder/Minority Owner Staff: Ilana S. Kloss, CEO/Commissioner Rosie Crews, Senior Vice President, Communications Nancy Falconer, Office Manager Matt Fitzgerald, Vice President, Digital & Manager, Player Operations Bryan Hicks, Director of Officiating Austin Nunn, Player Recruiting & Marketing Jason Spitz, Senior Vice President, Marketing Media Contact: Rosie Crews – [email protected] – O: (817) 684-0366 – C: (817) 691-5424 FOR INQUIRIES REGARDING THE RULES GUIDE CONTACT: Bryan Hicks – [email protected] – (203) 589-5482 Except where otherwise stated in this Rules Guide all rules apply to both genders. Original Publication – February 9, 2018 2 TABLE OF CONTENTS SECTION 1 DEFINITIONS .....................................................4 SECTION 2 LEAGUE ADMINISTRATION .............................7 SECTION 3 PLAYERS ......................................................... 16 SECTION 4 DRAFT .............................................................. 26 SECTION 5 MATCH OPERATIONS ..................................... 34 SECTION 6 PLAYING RULES ............................................. 48 SECTION 7 APPEALS, FINES AND CONDUCT ................. 65 SECTION 8 TERMS OF PARTICIPATION ........................... 77 INDEX ................................................................................... 85 3 SECTION 1 DEFINITIONS 4 101 WORLD TEAMTENNIS, LLC (WTT) is the owner and administrator of the World TeamTennis League. WTT has the right to revise these rules periodically at its sole discretion. -

Tennis Rules a Full Desciption
Tennis Rules A full desciption PDF generated using the open source mwlib toolkit. See http://code.pediapress.com/ for more information. PDF generated at: Wed, 05 Jan 2011 16:30:35 UTC Tennis 1 Tennis The US Open is a prestigious Grand Slam tournament. Highest governing body International Tennis Federation First played 19th century (U.K.) Characteristics Contact No Team members Single or doubles Categorization Racquet sport Equipment Tennis ball, tennis racquet Olympic 1896-1924, 1988-present Tennis is a sport usually played between two players (singles) or between two teams of two players each (doubles). Each player uses a racket that is strung to strike a hollow rubber ball covered with felt over a net into the opponent's court. The modern game of tennis originated in the United Kingdom in the late 19th century as "lawn tennis" which has close connections to various field/lawn games as well as to the ancient game of real tennis. Until then, "tennis" referred to the latter sport: for example, in Disraeli's novel Sybil (1845), Lord Eugene De Vere announces that he will "go down to Hampton Court and play tennis. As it is the Derby [classic horse race], nobody will be there".[1] After its creation, lawn tennis spread throughout the upper-class English-speaking population before spreading around the world.[2] Tennis is an Olympic sport and is played at all levels of society at all ages. The sport can be played by anyone who can hold a racket, including people in wheelchairs. The rules of tennis have not changed much since the 1890s. -

Newsline News from the American Sports Builders Association April 2018
Newsline News from the American Sports Builders Association April 2018 Inside Winter Meeting: The Perfect Way to Get Away This Issue and Get Things Done for ASBA Page 2 Board of Directors Page 3 Chairman’s Message Page 4 ASBA Technical Publications Page 4 Call for Photos Page 5 This year, ASBA’s Winter Meeting took a program issues, develop ideas for position papers, ASBA Sponsorship detour. Instead of hitting the islands, Florida or suggest topics for Technical Meeting presentations the Southeastern U.S., our meeting went west to and help with the work of the Certification Commit- Page 5 California’s Wine Country. And what we found was tee. New Members a great location, excellent opportunities and fun Afternoons were devoted to a variety of pursuits. diversions – all under sunny skies. Attendees were able to participate in a tennis outing, Page 6 The meeting, which took place February 23-25, go wine tasting and explore the area. In addition, the Bermudagrass 2018, at the Meritage Resort and Spa in Napa, of- Meritage’s full-service spa and amenities including Expectations fered some excellent changes to get away from it all pool, restaurants, fitness club and more, beckoned. – and stay connected to ASBA. The enjoyable half-day outings included a wine Page 7 Among the options for attendees who attended tour, in which attendees learned about viticulture, ASBA Awards the sessions (conveniently held in the first part of grape selection and the process of wine-making. The the day) were the opportunity to work on awards continued on page 2 Page 8 Position Papers ASBA Regional Meeting: Bringing the Meeting to the Members Page 9 Technical Meeting ASBA’s second annual “Regional Meeting,” Varsity Tennis Complex Post-Tensioned Project: A held in Kansas City, was another success.