Context-Sensitive Fencing: Securing Speculative Execution Via Microcode Customization
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
IEEE Paper Template in A4
Vasantha.N.S. et al, International Journal of Computer Science and Mobile Computing, Vol.6 Issue.6, June- 2017, pg. 302-306 Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology ISSN 2320–088X IMPACT FACTOR: 6.017 IJCSMC, Vol. 6, Issue. 6, June 2017, pg.302 – 306 Enhancing Performance in Multiple Execution Unit Architecture using Tomasulo Algorithm Vasantha.N.S.1, Meghana Kulkarni2 ¹Department of VLSI and Embedded Systems, Centre for PG Studies, VTU Belagavi, India ²Associate Professor Department of VLSI and Embedded Systems, Centre for PG Studies, VTU Belagavi, India 1 [email protected] ; 2 [email protected] Abstract— Tomasulo’s algorithm is a computer architecture hardware algorithm for dynamic scheduling of instructions that allows out-of-order execution, designed to efficiently utilize multiple execution units. It was developed by Robert Tomasulo at IBM. The major innovations of Tomasulo’s algorithm include register renaming in hardware. It also uses the concept of reservation stations for all execution units. A common data bus (CDB) on which computed values broadcast to all reservation stations that may need them is also present. The algorithm allows for improved parallel execution of instructions that would otherwise stall under the use of other earlier algorithms such as scoreboarding. Keywords— Reservation Station, Register renaming, common data bus, multiple execution unit, register file I. INTRODUCTION The instructions in any program may be executed in any of the 2 ways namely sequential order and the other is the data flow order. The sequential order is the one in which the instructions are executed one after the other but in reality this flow is very rare in programs. -
Data Storage the CPU-Memory
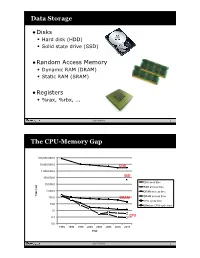
Data Storage •Disks • Hard disk (HDD) • Solid state drive (SSD) •Random Access Memory • Dynamic RAM (DRAM) • Static RAM (SRAM) •Registers • %rax, %rbx, ... Sean Barker 1 The CPU-Memory Gap 100,000,000.0 10,000,000.0 Disk 1,000,000.0 100,000.0 SSD Disk seek time 10,000.0 SSD access time 1,000.0 DRAM access time Time (ns) Time 100.0 DRAM SRAM access time CPU cycle time 10.0 Effective CPU cycle time 1.0 0.1 CPU 0.0 1985 1990 1995 2000 2003 2005 2010 2015 Year Sean Barker 2 Caching Smaller, faster, more expensive Cache 8 4 9 10 14 3 memory caches a subset of the blocks Data is copied in block-sized 10 4 transfer units Larger, slower, cheaper memory Memory 0 1 2 3 viewed as par@@oned into “blocks” 4 5 6 7 8 9 10 11 12 13 14 15 Sean Barker 3 Cache Hit Request: 14 Cache 8 9 14 3 Memory 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Sean Barker 4 Cache Miss Request: 12 Cache 8 12 9 14 3 12 Request: 12 Memory 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Sean Barker 5 Locality ¢ Temporal locality: ¢ Spa0al locality: Sean Barker 6 Locality Example (1) sum = 0; for (i = 0; i < n; i++) sum += a[i]; return sum; Sean Barker 7 Locality Example (2) int sum_array_rows(int a[M][N]) { int i, j, sum = 0; for (i = 0; i < M; i++) for (j = 0; j < N; j++) sum += a[i][j]; return sum; } Sean Barker 8 Locality Example (3) int sum_array_cols(int a[M][N]) { int i, j, sum = 0; for (j = 0; j < N; j++) for (i = 0; i < M; i++) sum += a[i][j]; return sum; } Sean Barker 9 The Memory Hierarchy The Memory Hierarchy Smaller On 1 cycle to access CPU Chip Registers Faster Storage Costlier instrs can L1, L2 per byte directly Cache(s) ~10’s of cycles to access access (SRAM) Main memory ~100 cycles to access (DRAM) Larger Slower Flash SSD / Local network ~100 M cycles to access Cheaper Local secondary storage (disk) per byte slower Remote secondary storage than local (tapes, Web servers / Internet) disk to access Sean Barker 10. -

Computer Science 246 Computer Architecture Spring 2010 Harvard University
Computer Science 246 Computer Architecture Spring 2010 Harvard University Instructor: Prof. David Brooks [email protected] Dynamic Branch Prediction, Speculation, and Multiple Issue Computer Science 246 David Brooks Lecture Outline • Tomasulo’s Algorithm Review (3.1-3.3) • Pointer-Based Renaming (MIPS R10000) • Dynamic Branch Prediction (3.4) • Other Front-end Optimizations (3.5) – Branch Target Buffers/Return Address Stack Computer Science 246 David Brooks Tomasulo Review • Reservation Stations – Distribute RAW hazard detection – Renaming eliminates WAW hazards – Buffering values in Reservation Stations removes WARs – Tag match in CDB requires many associative compares • Common Data Bus – Achilles heal of Tomasulo – Multiple writebacks (multiple CDBs) expensive • Load/Store reordering – Load address compared with store address in store buffer Computer Science 246 David Brooks Tomasulo Organization From Mem FP Op FP Registers Queue Load Buffers Load1 Load2 Load3 Load4 Load5 Store Load6 Buffers Add1 Add2 Mult1 Add3 Mult2 Reservation To Mem Stations FP adders FP multipliers Common Data Bus (CDB) Tomasulo Review 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 LD F0, 0(R1) Iss M1 M2 M3 M4 M5 M6 M7 M8 Wb MUL F4, F0, F2 Iss Iss Iss Iss Iss Iss Iss Iss Iss Ex Ex Ex Ex Wb SD 0(R1), F0 Iss Iss Iss Iss Iss Iss Iss Iss Iss Iss Iss Iss Iss M1 M2 M3 Wb SUBI R1, R1, 8 Iss Ex Wb BNEZ R1, Loop Iss Ex Wb LD F0, 0(R1) Iss Iss Iss Iss M Wb MUL F4, F0, F2 Iss Iss Iss Iss Iss Ex Ex Ex Ex Wb SD 0(R1), F0 Iss Iss Iss Iss Iss Iss Iss Iss Iss M1 M2 -

Dynamic Scheduling
Dynamically-Scheduled Machines ! • In a Statically-Scheduled machine, the compiler schedules all instructions to avoid data-hazards: the ID unit may require that instructions can issue together without hazards, otherwise the ID unit inserts stalls until the hazards clear! • This section will deal with Dynamically-Scheduled machines, where hardware- based techniques are used to detect are remove avoidable data-hazards automatically, to allow ‘out-of-order’ execution, and improve performance! • Dynamic scheduling used in the Pentium III and 4, the AMD Athlon, the MIPS R10000, the SUN Ultra-SPARC III; the IBM Power chips, the IBM/Motorola PowerPC, the HP Alpha 21264, the Intel Dual-Core and Quad-Core processors! • In contrast, static multiple-issue with compiler-based scheduling is used in the Intel IA-64 Itanium architectures! • In 2007, the dual-core and quad-core Intel processors use the Pentium 5 family of dynamically-scheduled processors. The Itanium has had a hard time gaining market share.! Ch. 6, Advanced Pipelining-DYNAMIC, slide 1! © Ted Szymanski! Dynamic Scheduling - the Idea ! (class text - pg 168, 171, 5th ed.)" !DIVD ! !F0, F2, F4! ADDD ! !F10, F0, F8 !- data hazard, stall issue for 23 cc! SUBD ! !F12, F8, F14 !- SUBD inherits 23 cc of stalls! • ADDD depends on DIVD; in a static scheduled machine, the ID unit detects the hazard and causes the basic pipeline to stall for 23 cc! • The SUBD instruction cannot execute because the pipeline has stalled, even though SUBD does not logically depend upon either previous instruction! • suppose the machine architecture was re-organized to let the SUBD and subsequent instructions “bypass” the previous stalled instruction (the ADDD) and proceed with its execution -> we would allow “out-of-order” execution! • however, out-of-order execution would allow out-of-order completion, which may allow RW (Read-Write) and WW (Write-Write) data hazards ! • a RW and WW hazard occurs when the reads/writes complete in the wrong order, destroying the data. -

United States Patent (19) 11 Patent Number: 5,680,565 Glew Et Al
USOO568.0565A United States Patent (19) 11 Patent Number: 5,680,565 Glew et al. 45 Date of Patent: Oct. 21, 1997 (54) METHOD AND APPARATUS FOR Diefendorff, "Organization of the Motorola 88110 Super PERFORMING PAGE TABLE WALKS INA scalar RISC Microprocessor.” IEEE Micro, Apr. 1996, pp. MCROPROCESSOR CAPABLE OF 40-63. PROCESSING SPECULATIVE Yeager, Kenneth C. "The MIPS R10000 Superscalar Micro INSTRUCTIONS processor.” IEEE Micro, Apr. 1996, pp. 28-40 Apr. 1996. 75 Inventors: Andy Glew, Hillsboro; Glenn Hinton; Smotherman et al. "Instruction Scheduling for the Motorola Haitham Akkary, both of Portland, all 88.110" Microarchitecture 1993 International Symposium, of Oreg. pp. 257-262. Circello et al., “The Motorola 68060 Microprocessor.” 73) Assignee: Intel Corporation, Santa Clara, Calif. COMPCON IEEE Comp. Soc. Int'l Conf., Spring 1993, pp. 73-78. 21 Appl. No.: 176,363 "Superscalar Microprocessor Design" by Mike Johnson, Advanced Micro Devices, Prentice Hall, 1991. 22 Filed: Dec. 30, 1993 Popescu, et al., "The Metaflow Architecture.” IEEE Micro, (51) Int. C. G06F 12/12 pp. 10-13 and 63–73, Jun. 1991. 52 U.S. Cl. ........................... 395/415: 395/800; 395/383 Primary Examiner-David K. Moore 58) Field of Search .................................. 395/400, 375, Assistant Examiner-Kevin Verbrugge 395/800, 414, 415, 421.03 Attorney, Agent, or Firm-Blakely, Sokoloff, Taylor & 56 References Cited Zafiman U.S. PATENT DOCUMENTS 57 ABSTRACT 5,136,697 8/1992 Johnson .................................. 395/586 A page table walk is performed in response to a data 5,226,126 7/1993 McFarland et al. 395/.394 translation lookaside buffer miss based on a speculative 5,230,068 7/1993 Van Dyke et al. -

Identifying Bottlenecks in a Multithreaded Superscalar
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by KITopen Identifying Bottlenecks in a Multithreaded Sup erscalar Micropro cessor Ulrich Sigmund and Theo Ungerer VIONA DevelopmentGmbH Karlstr D Karlsruhe Germany University of Karlsruhe Dept of Computer Design and Fault Tolerance D Karlsruhe Germany Abstract This pap er presents a multithreaded sup erscalar pro cessor that p ermits several threads to issue instructions to the execution units of a wide sup erscalar pro cessor in a single cycle Instructions can simul taneously b e issued from up to threads with a total issue bandwidth of instructions p er cycle Our results show that the threaded issue pro cessor reaches a throughput of instructions p er cycle Intro duction Current micropro cessors utilize instructionlevel parallelism by a deep pro cessor pip eline and by the sup erscalar technique that issues up to four instructions p er cycle from a single thread VLSItechnology will allow future generations of micropro cessors to exploit instructionlevel parallelism up to instructions p er cycle or more However the instructionlevel parallelism found in a conventional instruction stream is limited The solution is the additional utilization of more coarsegrained parallelism The main approaches are the multipro cessor chip and the multithreaded pro ces pro cessors on a sor The multipro cessor chip integrates two or more complete single chip Therefore every unit of a pro cessor is duplicated and used indep en dently of its copies on the chip -

Advanced Processor Designs
Advanced processor designs We’ve only scratched the surface of CPU design. Today we’ll briefly introduce some of the big ideas and big words behind modern processors by looking at two example CPUs. —The Motorola PowerPC, used in Apple computers and many embedded systems, is a good example of state-of-the-art RISC technologies. —The Intel Itanium is a more radical design intended for the higher-end systems market. April 9, 2003 ©2001-2003 Howard Huang 1 General ways to make CPUs faster You can improve the chip manufacturing technology. — Smaller CPUs can run at a higher clock rates, since electrons have to travel a shorter distance. Newer chips use a “0.13µm process,” and this will soon shrink down to 0.09µm. — Using different materials, such as copper instead of aluminum, can improve conductivity and also make things faster. You can also improve your CPU design, like we’ve been doing in CS232. — One of the most important ideas is parallel computation—executing several parts of a program at the same time. — Being able to execute more instructions at a time results in a higher instruction throughput, and a faster execution time. April 9, 2003 Advanced processor designs 2 Pipelining is parallelism We’ve already seen parallelism in detail! A pipelined processor executes many instructions at the same time. All modern processors use pipelining, because most programs will execute faster on a pipelined CPU without any programmer intervention. Today we’ll discuss some more advanced techniques to help you get the most out of your pipeline. April 9, 2003 Advanced processor designs 3 Motivation for some advanced ideas Our pipelined datapath only supports integer operations, and we assumed the ALU had about a 2ns delay. -

Cache-Aware Roofline Model: Upgrading the Loft
1 Cache-aware Roofline model: Upgrading the loft Aleksandar Ilic, Frederico Pratas, and Leonel Sousa INESC-ID/IST, Technical University of Lisbon, Portugal ilic,fcpp,las @inesc-id.pt f g Abstract—The Roofline model graphically represents the attainable upper bound performance of a computer architecture. This paper analyzes the original Roofline model and proposes a novel approach to provide a more insightful performance modeling of modern architectures by introducing cache-awareness, thus significantly improving the guidelines for application optimization. The proposed model was experimentally verified for different architectures by taking advantage of built-in hardware counters with a curve fitness above 90%. Index Terms—Multicore computer architectures, Performance modeling, Application optimization F 1 INTRODUCTION in Tab. 1. The horizontal part of the Roofline model cor- Driven by the increasing complexity of modern applica- responds to the compute bound region where the Fp can tions, microprocessors provide a huge diversity of compu- be achieved. The slanted part of the model represents the tational characteristics and capabilities. While this diversity memory bound region where the performance is limited is important to fulfill the existing computational needs, it by BD. The ridge point, where the two lines meet, marks imposes challenges to fully exploit architectures’ potential. the minimum I required to achieve Fp. In general, the A model that provides insights into the system performance original Roofline modeling concept [10] ties the Fp and the capabilities is a valuable tool to assist in the development theoretical bandwidth of a single memory level, with the I and optimization of applications and future architectures. -
ARM-Architecture Simulator Archulator
Embedded ECE Lab Arm Architecture Simulator University of Arizona ARM-Architecture Simulator Archulator Contents Purpose ............................................................................................................................................ 2 Description ...................................................................................................................................... 2 Block Diagram ............................................................................................................................ 2 Component Description .............................................................................................................. 3 Buses ..................................................................................................................................................... 3 µP .......................................................................................................................................................... 3 Caches ................................................................................................................................................... 3 Memory ................................................................................................................................................. 3 CoProcessor .......................................................................................................................................... 3 Using the Archulator ...................................................................................................................... -

Computer Architecture Out-Of-Order Execution
Computer Architecture Out-of-order Execution By Yoav Etsion With acknowledgement to Dan Tsafrir, Avi Mendelson, Lihu Rappoport, and Adi Yoaz 1 Computer Architecture 2013– Out-of-Order Execution The need for speed: Superscalar • Remember our goal: minimize CPU Time CPU Time = duration of clock cycle × CPI × IC • So far we have learned that in order to Minimize clock cycle ⇒ add more pipe stages Minimize CPI ⇒ utilize pipeline Minimize IC ⇒ change/improve the architecture • Why not make the pipeline deeper and deeper? Beyond some point, adding more pipe stages doesn’t help, because Control/data hazards increase, and become costlier • (Recall that in a pipelined CPU, CPI=1 only w/o hazards) • So what can we do next? Reduce the CPI by utilizing ILP (instruction level parallelism) We will need to duplicate HW for this purpose… 2 Computer Architecture 2013– Out-of-Order Execution A simple superscalar CPU • Duplicates the pipeline to accommodate ILP (IPC > 1) ILP=instruction-level parallelism • Note that duplicating HW in just one pipe stage doesn’t help e.g., when having 2 ALUs, the bottleneck moves to other stages IF ID EXE MEM WB • Conclusion: Getting IPC > 1 requires to fetch/decode/exe/retire >1 instruction per clock: IF ID EXE MEM WB 3 Computer Architecture 2013– Out-of-Order Execution Example: Pentium Processor • Pentium fetches & decodes 2 instructions per cycle • Before register file read, decide on pairing Can the two instructions be executed in parallel? (yes/no) u-pipe IF ID v-pipe • Pairing decision is based… On data -

Multi-Tier Caching Technology™
Multi-Tier Caching Technology™ Technology Paper Authored by: How Layering an Application’s Cache Improves Performance Modern data storage needs go far beyond just computing. From creative professional environments to desktop systems, Seagate provides solutions for almost any application that requires large volumes of storage. As a leader in NAND, hybrid, SMR and conventional magnetic recording technologies, Seagate® applies different levels of caching and media optimization to benefit performance and capacity. Multi-Tier Caching (MTC) Technology brings the highest performance and areal density to a multitude of applications. Each Seagate product is uniquely tailored to meet the performance requirements of a specific use case with the right memory, NAND, and media type and size. This paper explains how MTC Technology works to optimize hard drive performance. MTC Technology: Key Advantages Capacity requirements can vary greatly from business to business. While the fastest performance can be achieved using Dynamic Random Access Memory (DRAM) cache, the data in the DRAM is not persistent through power cycles and DRAM is very expensive compared to other media. NAND flash data survives through power cycles but it is still very expensive compared to a magnetic storage medium. Magnetic storage media cache offers good performance at a very low cost. On the downside, media cache takes away overall disk drive capacity from PMR or SMR main store media. MTC Technology solves this dilemma by using these diverse media components in combination to offer different levels of performance and capacity at varying price points. By carefully tuning firmware with appropriate cache types and sizes, the end user can experience excellent overall system performance. -

CUDA 11 and A100 - WHAT’S NEW? Markus Hrywniak, 23Rd June 2020 TOPICS for TODAY
CUDA 11 AND A100 - WHAT’S NEW? Markus Hrywniak, 23rd June 2020 TOPICS FOR TODAY Ampere architecture – A100, powering DGX–A100, HGX-A100... and soon, FZ Jülich‘s JUWELS Booster New CUDA 11 Toolkit release Overview of features Talk next week: Third generation Tensor Cores GTC talks go into much more details. See references! 2 HGX-A100 4-GPU HGX-A100 8-GPU • 4 A100 with NVLINK • 8 A100 with NVSwitch 3 HIERARCHY OF SCALES Multi-System Rack Multi-GPU System Multi-SM GPU Multi-Core SM Unlimited Scale 8 GPUs 108 Multiprocessors 2048 threads 4 AMDAHL’S LAW serial section parallel section serial section Amdahl’s Law parallel section Shortest possible runtime is sum of serial section times Time saved serial section Some Parallelism Increased Parallelism Infinite Parallelism Program time = Parallel sections take less time Parallel sections take no time sum(serial times + parallel times) Serial sections take same time Serial sections take same time 5 OVERCOMING AMDAHL: ASYNCHRONY & LATENCY serial section parallel section serial section Split up serial & parallel components parallel section serial section Some Parallelism Task Parallelism Infinite Parallelism Program time = Parallel sections overlap with serial sections Parallel sections take no time sum(serial times + parallel times) Serial sections take same time 6 OVERCOMING AMDAHL: ASYNCHRONY & LATENCY CUDA Concurrency Mechanisms At Every Scope CUDA Kernel Threads, Warps, Blocks, Barriers Application CUDA Streams, CUDA Graphs Node Multi-Process Service, GPU-Direct System NCCL, CUDA-Aware MPI, NVSHMEM 7 OVERCOMING AMDAHL: ASYNCHRONY & LATENCY Execution Overheads Non-productive latencies (waste) Operation Latency Network latencies Memory read/write File I/O ..