Dynamical Analysis of a New Chaotic Fractional Discrete-Time System and Its Control
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Solution Bounds, Stability and Attractors' Estimates of Some Nonlinear Time-Varying Systems
1 Solution Bounds, Stability and Attractors’ Estimates of Some Nonlinear Time-Varying Systems Mark A. Pinsky and Steve Koblik Abstract. Estimation of solution norms and stability for time-dependent nonlinear systems is ubiquitous in numerous applied and control problems. Yet, practically valuable results are rare in this area. This paper develops a novel approach, which bounds the solution norms, derives the corresponding stability criteria, and estimates the trapping/stability regions for a broad class of the corresponding systems. Our inferences rest on deriving a scalar differential inequality for the norms of solutions to the initial systems. Utility of the Lipschitz inequality linearizes the associated auxiliary differential equation and yields both the upper bounds for the norms of solutions and the relevant stability criteria. To refine these inferences, we introduce a nonlinear extension of the Lipschitz inequality, which improves the developed bounds and estimates the stability basins and trapping regions for the corresponding systems. Finally, we conform the theoretical results in representative simulations. Key Words. Comparison principle, Lipschitz condition, stability criteria, trapping/stability regions, solution bounds AMS subject classification. 34A34, 34C11, 34C29, 34C41, 34D08, 34D10, 34D20, 34D45 1. INTRODUCTION. We are going to study a system defined by the equation n (1) xAtxftxFttt , , [0 , ), x , ft ,0 0 where matrix A nn and functions ft:[ , ) nn and F : n are continuous and bounded, and At is also continuously differentiable. It is assumed that the solution, x t, x0 , to the initial value problem, x t0, x 0 x 0 , is uniquely defined for tt0 . Note that the pertained conditions can be found, e.g., in [1] and [2]. -

Strange Attractors and Classical Stability Theory
Nonlinear Dynamics and Systems Theory, 8 (1) (2008) 49–96 Strange Attractors and Classical Stability Theory G. Leonov ∗ St. Petersburg State University Universitetskaya av., 28, Petrodvorets, 198504 St.Petersburg, Russia Received: November 16, 2006; Revised: December 15, 2007 Abstract: Definitions of global attractor, B-attractor and weak attractor are introduced. Relationships between Lyapunov stability, Poincare stability and Zhukovsky stability are considered. Perron effects are discussed. Stability and instability criteria by the first approximation are obtained. Lyapunov direct method in dimension theory is introduced. For the Lorenz system necessary and sufficient conditions of existence of homoclinic trajectories are obtained. Keywords: Attractor, instability, Lyapunov exponent, stability, Poincar´esection, Hausdorff dimension, Lorenz system, homoclinic bifurcation. Mathematics Subject Classification (2000): 34C28, 34D45, 34D20. 1 Introduction In almost any solid survey or book on chaotic dynamics, one encounters notions from classical stability theory such as Lyapunov exponent and characteristic exponent. But the effect of sign inversion in the characteristic exponent during linearization is seldom mentioned. This effect was discovered by Oscar Perron [1], an outstanding German math- ematician. The present survey sets forth Perron’s results and their further development, see [2]–[4]. It is shown that Perron effects may occur on the boundaries of a flow of solutions that is stable by the first approximation. Inside the flow, stability is completely determined by the negativeness of the characteristic exponents of linearized systems. It is often said that the defining property of strange attractors is the sensitivity of their trajectories with respect to the initial data. But how is this property connected with the classical notions of instability? For continuous systems, it was necessary to remember the almost forgotten notion of Zhukovsky instability. -

THE LORENZ SYSTEM Math118, O. Knill GLOBAL EXISTENCE
THE LORENZ SYSTEM Math118, O. Knill GLOBAL EXISTENCE. Remember that nonlinear differential equations do not necessarily have global solutions like d=dtx(t) = x2(t). If solutions do not exist for all times, there is a finite τ such that x(t) for t τ. j j ! 1 ! ABSTRACT. In this lecture, we have a closer look at the Lorenz system. LEMMA. The Lorenz system has a solution x(t) for all times. THE LORENZ SYSTEM. The differential equations Since we have a trapping region, the Lorenz differential equation exist for all times t > 0. If we run time _ 2 2 2 ct x_ = σ(y x) backwards, we have V = 2σ(rx + y + bz 2brz) cV for some constant c. Therefore V (t) V (0)e . − − ≤ ≤ y_ = rx y xz − − THE ATTRACTING SET. The set K = t> Tt(E) is invariant under the differential equation. It has zero z_ = xy bz : T 0 − volume and is called the attracting set of the Lorenz equations. It contains the unstable manifold of O. are called the Lorenz system. There are three parameters. For σ = 10; r = 28; b = 8=3, Lorenz discovered in 1963 an interesting long time behavior and an EQUILIBRIUM POINTS. Besides the origin O = (0; 0; 0, we have two other aperiodic "attractor". The picture to the right shows a numerical integration equilibrium points. C = ( b(r 1); b(r 1); r 1). For r < 1, all p − p − − of an orbit for t [0; 40]. solutions are attracted to the origin. At r = 1, the two equilibrium points 2 appear with a period doubling bifurcation. -

Chapter 8 Stability Theory
Chapter 8 Stability theory We discuss properties of solutions of a first order two dimensional system, and stability theory for a special class of linear systems. We denote the independent variable by ‘t’ in place of ‘x’, and x,y denote dependent variables. Let I ⊆ R be an interval, and Ω ⊆ R2 be a domain. Let us consider the system dx = F (t, x, y), dt (8.1) dy = G(t, x, y), dt where the functions are defined on I × Ω, and are locally Lipschitz w.r.t. variable (x, y) ∈ Ω. Definition 8.1 (Autonomous system) A system of ODE having the form (8.1) is called an autonomous system if the functions F (t, x, y) and G(t, x, y) are constant w.r.t. variable t. That is, dx = F (x, y), dt (8.2) dy = G(x, y), dt Definition 8.2 A point (x0, y0) ∈ Ω is said to be a critical point of the autonomous system (8.2) if F (x0, y0) = G(x0, y0) = 0. (8.3) A critical point is also called an equilibrium point, a rest point. Definition 8.3 Let (x(t), y(t)) be a solution of a two-dimensional (planar) autonomous system (8.2). The trace of (x(t), y(t)) as t varies is a curve in the plane. This curve is called trajectory. Remark 8.4 (On solutions of autonomous systems) (i) Two different solutions may represent the same trajectory. For, (1) If (x1(t), y1(t)) defined on an interval J is a solution of the autonomous system (8.2), then the pair of functions (x2(t), y2(t)) defined by (x2(t), y2(t)) := (x1(t − s), y1(t − s)), for t ∈ s + J (8.4) is a solution on interval s + J, for every arbitrary but fixed s ∈ R. -

Tom W B Kibble Frank H Ber
Classical Mechanics 5th Edition Classical Mechanics 5th Edition Tom W.B. Kibble Frank H. Berkshire Imperial College London Imperial College Press ICP Published by Imperial College Press 57 Shelton Street Covent Garden London WC2H 9HE Distributed by World Scientific Publishing Co. Pte. Ltd. 5 Toh Tuck Link, Singapore 596224 USA office: Suite 202, 1060 Main Street, River Edge, NJ 07661 UK office: 57 Shelton Street, Covent Garden, London WC2H 9HE Library of Congress Cataloging-in-Publication Data Kibble, T. W. B. Classical mechanics / Tom W. B. Kibble, Frank H. Berkshire, -- 5th ed. p. cm. Includes bibliographical references and index. ISBN 1860944248 -- ISBN 1860944353 (pbk). 1. Mechanics, Analytic. I. Berkshire, F. H. (Frank H.). II. Title QA805 .K5 2004 531'.01'515--dc 22 2004044010 British Library Cataloguing-in-Publication Data A catalogue record for this book is available from the British Library. Copyright © 2004 by Imperial College Press All rights reserved. This book, or parts thereof, may not be reproduced in any form or by any means, electronic or mechanical, including photocopying, recording or any information storage and retrieval system now known or to be invented, without written permission from the Publisher. For photocopying of material in this volume, please pay a copying fee through the Copyright Clearance Center, Inc., 222 Rosewood Drive, Danvers, MA 01923, USA. In this case permission to photocopy is not required from the publisher. Printed in Singapore. To Anne and Rosie vi Preface This book, based on courses given to physics and applied mathematics stu- dents at Imperial College, deals with the mechanics of particles and rigid bodies. -
Robot Dynamics and Control Lecture 8: Basic Lyapunov Stability Theory
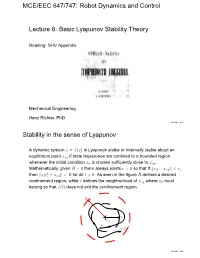
MCE/EEC 647/747: Robot Dynamics and Control Lecture 8: Basic Lyapunov Stability Theory Reading: SHV Appendix Mechanical Engineering Hanz Richter, PhD MCE503 – p.1/17 Stability in the sense of Lyapunov A dynamic system x˙ = f(x) is Lyapunov stable or internally stable about an equilibrium point xeq if state trajectories are confined to a bounded region whenever the initial condition x0 is chosen sufficiently close to xeq. Mathematically, given R> 0 there always exists r > 0 so that if ||x0 − xeq|| <r, then ||x(t) − xeq|| <R for all t> 0. As seen in the figure R defines a desired confinement region, while r defines the neighborhood of xeq where x0 must belong so that x(t) does not exit the confinement region. R r xeq x0 x(t) MCE503 – p.2/17 Stability in the sense of Lyapunov... Note: Lyapunov stability does not require ||x(t)|| to converge to ||xeq||. The stronger definition of asymptotic stability requires that ||x(t)|| → ||xeq|| as t →∞. Input-Output stability (BIBO) does not imply Lyapunov stability. The system can be BIBO stable but have unbounded states that do not cause the output to be unbounded (for example take x1(t) →∞, with y = Cx = [01]x). The definition is difficult to use to test the stability of a given system. Instead, we use Lyapunov’s stability theorem, also called Lyapunov’s direct method. This theorem is only a sufficient condition, however. When the test fails, the results are inconclusive. It’s still the best tool available to evaluate and ensure the stability of nonlinear systems. -

Symmetric Encryption Algorithms Using Chaotic and Non-Chaotic Generators: a Review
Journal of Advanced Research (2016) 7, 193–208 Cairo University Journal of Advanced Research REVIEW Symmetric encryption algorithms using chaotic and non-chaotic generators: A review Ahmed G. Radwan a,b,*, Sherif H. AbdElHaleem a, Salwa K. Abd-El-Hafiz a a Engineering Mathematics Department, Faculty of Engineering, Cairo University, Giza 12613, Egypt b Nanoelectronics Integrated Systems Center (NISC), Nile University, Cairo, Egypt GRAPHICAL ABSTRACT ARTICLE INFO ABSTRACT Article history: This paper summarizes the symmetric image encryption results of 27 different algorithms, which Received 27 May 2015 include substitution-only, permutation-only or both phases. The cores of these algorithms are Received in revised form 24 July 2015 based on several discrete chaotic maps (Arnold’s cat map and a combination of three general- Accepted 27 July 2015 ized maps), one continuous chaotic system (Lorenz) and two non-chaotic generators (fractals Available online 1 August 2015 and chess-based algorithms). Each algorithm has been analyzed by the correlation coefficients * Corresponding author. Tel.: +20 1224647440; fax: +20 235723486. E-mail address: [email protected] (A.G. Radwan). Peer review under responsibility of Cairo University. Production and hosting by Elsevier http://dx.doi.org/10.1016/j.jare.2015.07.002 2090-1232 ª 2015 Production and hosting by Elsevier B.V. on behalf of Cairo University. 194 A.G. Radwan et al. between pixels (horizontal, vertical and diagonal), differential attack measures, Mean Square Keywords: Error (MSE), entropy, sensitivity analyses and the 15 standard tests of the National Institute Permutation matrix of Standards and Technology (NIST) SP-800-22 statistical suite. The analyzed algorithms Symmetric encryption include a set of new image encryption algorithms based on non-chaotic generators, either using Chess substitution only (using fractals) and permutation only (chess-based) or both. -

Chaos: the Mathematics Behind the Butterfly Effect
Chaos: The Mathematics Behind the Butterfly E↵ect James Manning Advisor: Jan Holly Colby College Mathematics Spring, 2017 1 1. Introduction A butterfly flaps its wings, and a hurricane hits somewhere many miles away. Can these two events possibly be related? This is an adage known to many but understood by few. That fact is based on the difficulty of the mathematics behind the adage. Now, it must be stated that, in fact, the flapping of a butterfly’s wings is not actually known to be the reason for any natural disasters, but the idea of it does get at the driving force of Chaos Theory. The common theme among the two is sensitive dependence on initial conditions. This is an idea that will be revisited later in the paper, because we must first cover the concepts necessary to frame chaos. This paper will explore one, two, and three dimensional systems, maps, bifurcations, limit cycles, attractors, and strange attractors before looking into the mechanics of chaos. Once chaos is introduced, we will look in depth at the Lorenz Equations. 2. One Dimensional Systems We begin our study by looking at nonlinear systems in one dimen- sion. One of the important features of these is the nonlinearity. Non- linearity in an equation evokes behavior that is not easily predicted due to the disproportionate nature of inputs and outputs. Also, the term “system”isoftenamisnomerbecauseitoftenevokestheideaof asystemofequations.Thiswillbethecaseaswemoveourfocuso↵ of one dimension, but for now we do not want to think of a system of equations. In this case, the type of system we want to consider is a first-order system of a single equation. -

The Lorenz System
The Lorenz system James Hateley Contents 1 Formulation 2 2 Fixed points 4 3 Attractors 4 4 Phase analysis 5 4.1 Local Stability at The Origin....................................5 4.2 Global Stability............................................6 4.2.1 0 < ρ < 1...........................................6 4.2.2 1 < ρ < ρh ..........................................6 4.3 Bifurcations..............................................6 4.3.1 Supercritical pitchfork bifurcation: ρ = 1.........................7 4.3.2 Subcritical Hopf-Bifurcation: ρ = ρh ............................8 4.4 Strange Attracting Sets.......................................8 4.4.1 Homoclinic Orbits......................................9 4.4.2 Poincar´eMap.........................................9 4.4.3 Dynamics at ρ∗ ........................................9 4.4.4 Asymptotic Behavior..................................... 10 4.4.5 A Few Remarks........................................ 10 5 Numerical Simulations and Figures 10 5.1 Globally stable , 0 < ρ < 1...................................... 10 5.2 Pitchfork Bifurcation, ρ = 1..................................... 12 5.3 Homoclinic orbit........................................... 12 5.4 Transient Chaos........................................... 12 5.5 Chaos................................................. 14 5.5.1 A plot for ρh ......................................... 14 5.6 Other Notable Orbits........................................ 16 5.6.1 Double Periodic Orbits................................... 16 5.6.2 Intermittent -

Analysis of ODE Models
Analysis of ODE Models P. Howard Fall 2009 Contents 1 Overview 1 2 Stability 2 2.1 ThePhasePlane ................................. 5 2.2 Linearization ................................... 10 2.3 LinearizationandtheJacobianMatrix . ...... 15 2.4 BriefReviewofLinearAlgebra . ... 20 2.5 Solving Linear First-Order Systems . ...... 23 2.6 StabilityandEigenvalues . ... 28 2.7 LinearStabilitywithMATLAB . .. 35 2.8 Application to Maximum Sustainable Yield . ....... 37 2.9 Nonlinear Stability Theorems . .... 38 2.10 Solving ODE Systems with matrix exponentiation . ......... 40 2.11 Taylor’s Formula for Functions of Multiple Variables . ............ 44 2.12 ProofofPart1ofPoincare–Perron . ..... 45 3 Uniqueness Theory 47 4 Existence Theory 50 1 Overview In these notes we consider the three main aspects of ODE analysis: (1) existence theory, (2) uniqueness theory, and (3) stability theory. In our study of existence theory we ask the most basic question: are the ODE we write down guaranteed to have solutions? Since in practice we solve most ODE numerically, it’s possible that if there is no theoretical solution the numerical values given will have no genuine relation with the physical system we want to analyze. In our study of uniqueness theory we assume a solution exists and ask if it is the only possible solution. If we are solving an ODE numerically we will only get one solution, and if solutions are not unique it may not be the physically interesting solution. While it’s standard in advanced ODE courses to study existence and uniqueness first and stability 1 later, we will start with stability in these note, because it’s the one most directly linked with the modeling process. -

SPATIOTEMPORAL CHAOS in COUPLED MAP LATTICE Itishree
SPATIOTEMPORAL CHAOS IN COUPLED MAP LATTICE By Itishree Priyadarshini Under the Guidance of Prof. Biplab Ganguli Department of Physics National Institute of Technology, Rourkela CERTIFICATE This is to certify that the project thesis entitled ” Spatiotemporal chaos in Cou- pled Map Lattice ” being submitted by Itishree Priyadarshini in partial fulfilment to the requirement of the one year project course (PH 592) of MSc Degree in physics of National Institute of Technology, Rourkela has been carried out under my super- vision. The result incorporated in the thesis has been produced by developing her own computer codes. Prof. Biplab Ganguli Dept. of Physics National Institute of Technology Rourkela - 769008 1 ACKNOWLEDGEMENT I would like to acknowledge my guide Prof. Biplab Ganguli for his help and guidance in the completion of my one-year project and also for his enormous moti- vation and encouragement. I am also very much thankful to research scholars whose encouragement and support helped me to complete my project. 2 ABSTRACT The sensitive dependence on initial condition, which is the essential feature of chaos is demonstrated through simple Lorenz model. Period doubling route to chaos is shown by analysis of Logistic map and other different route to chaos is discussed. Coupled map lattices are investigated as a model for spatio-temporal chaos. Diffusively coupled logistic lattice is studied which shows different pattern in accordance with the coupling constant and the non-linear parameter i.e. frozen random pattern, pattern selection with suppression of chaos , Brownian motion of the space defect, intermittent collapse, soliton turbulence and travelling waves. 3 Contents 1 Introduction 3 2 Chaos 3 3 Lorenz System 4 4 Route to Chaos 6 4.1 PeriodDoubling............................. -

Unstable Dimension Variability Structure in the Parameter Space of Coupled Hénon Maps
Applied Mathematics and Computation 286 (2016) 23–28 Contents lists available at ScienceDirect Applied Mathematics and Computation journal homepage: www.elsevier.com/locate/amc Unstable dimension variability structure in the parameter space of coupled Hénon maps ∗ Vagner dos Santos a, José D. Szezech Jr. a,b, , Murilo S. Baptista c, Antonio M. Batista a,b,d, Iberê L. Caldas d a Pós-Graduação em Ciências, Universidade Estadual de Ponta Grossa, 84030-900 Ponta Grossa, PR, Brazil b Departamento de Matemática e Estatística, Universidade Estadual de Ponta Grossa, 84030-900 Ponta Grossa, PR, Brazil c Institute for Complex Systems and Mathematical Biology, SUPA, University of Aberdeen, AB24 3UE Aberdeen, UK d Instituto de Física, Universidade de São Paulo, 05508-090 São Paulo, SP, Brazil a r t i c l e i n f o a b s t r a c t Keywords: Coupled maps have been investigated to model the applications of periodic and chaotic UDV dynamics of spatially extended systems. We have studied the parameter space of coupled Shrimp Hénon maps and showed that attractors possessing unstable dimension variability (UDV) Hénon map appear for parameters neighbouring the so called shrimp domains, representing param- Parameter-space Lyapunov exponents eters leading to stable periodic behaviour. Therefore, the UDV should be very likely to be found in the same large class of natural and man-made systems that present shrimp domains. ©2016 Elsevier Inc. All rights reserved. 1. Introduction In the early 1960s, Lorenz proposed three coupled nonlinear differential equations to model atmospheric convection [1] . The Lorenz equations have attracted great attention due to their interesting dynamical solutions, for instance, a chaotic at- tractor [2,3] .