Below I Present the Most Common Types of Signal Modulation: the Pulse, Amplitude and Frequency Modulations. I Also Discuss Situa
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Additive Synthesis, Amplitude Modulation and Frequency Modulation
Additive Synthesis, Amplitude Modulation and Frequency Modulation Prof Eduardo R Miranda Varèse-Gastprofessor [email protected] Electronic Music Studio TU Berlin Institute of Communications Research http://www.kgw.tu-berlin.de/ Topics: Additive Synthesis Amplitude Modulation (and Ring Modulation) Frequency Modulation Additive Synthesis • The technique assumes that any periodic waveform can be modelled as a sum sinusoids at various amplitude envelopes and time-varying frequencies. • Works by summing up individually generated sinusoids in order to form a specific sound. Additive Synthesis eg21 Additive Synthesis eg24 • A very powerful and flexible technique. • But it is difficult to control manually and is computationally expensive. • Musical timbres: composed of dozens of time-varying partials. • It requires dozens of oscillators, noise generators and envelopes to obtain convincing simulations of acoustic sounds. • The specification and control of the parameter values for these components are difficult and time consuming. • Alternative approach: tools to obtain the synthesis parameters automatically from the analysis of the spectrum of sampled sounds. Amplitude Modulation • Modulation occurs when some aspect of an audio signal (carrier) varies according to the behaviour of another signal (modulator). • AM = when a modulator drives the amplitude of a carrier. • Simple AM: uses only 2 sinewave oscillators. eg23 • Complex AM: may involve more than 2 signals; or signals other than sinewaves may be employed as carriers and/or modulators. • Two types of AM: a) Classic AM b) Ring Modulation Classic AM • The output from the modulator is added to an offset amplitude value. • If there is no modulation, then the amplitude of the carrier will be equal to the offset. -

Amplitude Modulation(AM)
Introduction to Modulation: Amplitude Modulation(AM) Sharlene Katz James Flynn Overview Modulation Overview Basics of Amplitude Modulation (AM) AM Demonstration GRC Exercise 2 Flynn/Katz 7/8/10 Why do we need Modulation/Demodulation? Example: Radio transmission Voice Microphone Transmitter Electric signal, Antenna: 20 Hz – 20 Size requirement KHz > 1/10 wavelength c 3×108 Antenna too large! 5 Use modulation to At 3 KHz: λ = = 3 =10 =100km f 3×10 transfer ⇒ .1λ =10km information to a higher frequency 3 Flynn/Katz 7/8/10 Why do we need Modulation/Demodulation? (cont’d) Frequency Assignment Reduction of noise/interference Multiplexing Bandwidth limitations of equipment Frequency characteristics of antennas Atmospheric/cable properties 4 Flynn/Katz 7/8/10 Basic Concept of Modulation The information source Typically a low frequency signal Referred to as the “baseband signal” X(f) x(t) t f Carrier A higher frequency sinusoid baseband Modulated Modulator Example: cos(2π10000t) carrier signal Modulated Signal Some parameter of the carrier (amplitude, frequency, phase) is varied in accordance with the baseband signal 5 Flynn/Katz 7/8/10 Types of Modulation Analog Modulation Amplitude Modulation, AM Frequency Modulation, FM Double and Single Sideband, DSB and SSB Digital Modulation Phase Shift Keying: BPSK, QPSK, MSK Frequency Shift Keying, FSK Quadrature Amplitude Modulation, QAM 6 Flynn/Katz 7/8/10 Amplitude Modulation (AM) Block Diagram x(t) m x + xAM(t)=Ac [1+mx(t)]cos wct Ac cos wct Time Domain Signal information -

Federal Communications Commission § 73.1590
Federal Communications Commission § 73.1590 the licensee must notify the FCC of the (2) FM stations. The total modulation date that normal operation was re- must not exceed 100 percent on peaks stored. If causes beyond the control of of frequent reoccurrence referenced to the licensee prevent restoration of the 75 kHz deviation. However, stations authorized power within 30 days, a re- providing subsidiary communications quest for Special Temporary Authority services using subcarriers under provi- (see § 73.1635) must be made to the FCC sions of § 73.319 concurrently with the in Washington, DC for additional time broadcasting of stereophonic or as may be necessary. monophonic programs may increase the peak modulation deviation as fol- [44 FR 58734, Oct. 11, 1979, as amended at 49 lows: FR 22093, May 25, 1984; 49 FR 29069, July 18, 1984; 49 FR 47610, Dec. 6, 1984; 50 FR 26568, (i) The total peak modulation may be June 27, 1985; 50 FR 40015, Oct. 1, 1985; 63 FR increased 0.5 percent for each 1.0 per- 33877, June 22, 1998; 65 FR 30004, May 10, 2000; cent subcarrier injection modulation. 67 FR 13232, Mar. 21, 2002] (ii) In no event may the modulation of the carrier exceed 110 percent (82.5 § 73.1570 Modulation levels: AM, FM, kHz peak deviation). TV and Class A TV aural. (3) TV and Class A TV stations. In no (a) The percentage of modulation is case shall the total modulation of the to be maintained at as high a level as aural carrier exceed 100% on peaks of is consistent with good quality of frequent recurrence, unless some other transmission and good broadcast serv- peak modulation level is specified in an ice, with maximum levels not to exceed instrument of authorization. -

Saleh Faruque Radio Frequency Modulation Made Easy
SPRINGER BRIEFS IN ELECTRICAL AND COMPUTER ENGINEERING Saleh Faruque Radio Frequency Modulation Made Easy 123 SpringerBriefs in Electrical and Computer Engineering More information about this series at http://www.springer.com/series/10059 Saleh Faruque Radio Frequency Modulation Made Easy 123 Saleh Faruque Department of Electrical Engineering University of North Dakota Grand Forks, ND USA ISSN 2191-8112 ISSN 2191-8120 (electronic) SpringerBriefs in Electrical and Computer Engineering ISBN 978-3-319-41200-9 ISBN 978-3-319-41202-3 (eBook) DOI 10.1007/978-3-319-41202-3 Library of Congress Control Number: 2016945147 © The Author(s) 2017 This work is subject to copyright. All rights are reserved by the Publisher, whether the whole or part of the material is concerned, specifically the rights of translation, reprinting, reuse of illustrations, recitation, broadcasting, reproduction on microfilms or in any other physical way, and transmission or information storage and retrieval, electronic adaptation, computer software, or by similar or dissimilar methodology now known or hereafter developed. The use of general descriptive names, registered names, trademarks, service marks, etc. in this publication does not imply, even in the absence of a specific statement, that such names are exempt from the relevant protective laws and regulations and therefore free for general use. The publisher, the authors and the editors are safe to assume that the advice and information in this book are believed to be true and accurate at the date of publication. Neither the publisher nor the authors or the editors give a warranty, express or implied, with respect to the material contained herein or for any errors or omissions that may have been made. -
ETS 300 750 TELECOMMUNICATION May 1996 STANDARD
DRAFT EUROPEAN pr ETS 300 750 TELECOMMUNICATION May 1996 STANDARD Source: EBU/CENELEC/ETSI JTC Reference: DE/JTC-00VHFTXHU ICS: 33.060.20 Key words: broadcasting, radio, transmitter, FM, VHF, audio European Broadcasting Union Union Européenne de Radio-Télévision EBU UER Radio broadcasting systems; Very High Frequency (VHF), frequency modulated, sound broadcasting transmitters in the 66 to 73 MHz band ETSI European Telecommunications Standards Institute ETSI Secretariat Postal address: F-06921 Sophia Antipolis CEDEX - FRANCE Office address: 650 Route des Lucioles - Sophia Antipolis - Valbonne - FRANCE X.400: c=fr, a=atlas, p=etsi, s=secretariat - Internet: [email protected] Tel.: +33 92 94 42 00 - Fax: +33 93 65 47 16 Copyright Notification: No part may be reproduced except as authorized by written permission. The copyright and the * foregoing restriction extend to reproduction in all media. © European Telecommunications Standards Institute 1996. © European Broadcasting Union 1996. All rights reserved. Page 2 Draft prETS 300 750: May 1996 Whilst every care has been taken in the preparation and publication of this document, errors in content, typographical or otherwise, may occur. If you have comments concerning its accuracy, please write to "ETSI Editing and Committee Support Dept." at the address shown on the title page. Page 3 Draft prETS 300 750: May 1996 Contents Foreword .......................................................................................................................................................5 1 Scope -

Communication Systems Amplitude Modulation (AM)
16.002 Lecture (8) Communication Systems Amplitude Modulation (AM) April 9, 2008 Today’s Topics 1. Amplitude modulation of signals 2. Application issues Take Away Fourier Transform methods facilitate the understanding of modulation in communication systems Required Reading O&W-8.0, 8.1, 8.2, 8.3, 8.7 Communication systems typically transmit information that has content at relatively low frequencies by encoding it, in one fashion or another, onto carrier signals at much higher frequencies. For example, amplitude modulated (AM) commercial radio broadcasting systems typically transmit voice and music signals using electromagnetic waves that pass readily through the atmosphere. The voice and music signals have frequency content typically in the range of about 20 Hz (cycles per second) up to about 20 kHz (thousands of cycles per second). The physical characteristics of the atmosphere make it very difficult for signals at these frequencies to be transmitted at distances beyond a few meters. Rather, these signals are encoded onto high frequency sinusoidal carrier signals that are in the range of 520 kHz up to 1.75 MHz (millions of cycles per second), by modulating the amplitude of the carrier wave. Typically the frequency of the carrier is one or more orders of magnitude greater than the frequency of the signal it is “carrying”. Fourier transform methods are an ideal means for understanding the workings of these kinds of communication systems. Amplitude Modulation We will start our study of communications systems by first analyzing the AM method of communicating signals. The two most common forms of amplitude modulation use either a complex carrier or a single sinusoidal carrier. -

The AM Signalling System, AMSS
RADIO BROADCASTING TheAMSS AM Signalling System: — does your radio know what it’s listening to? Andrew Murphy and Ranulph Poole BBC Research & Development, UK The AM Signalling System (AMSS) adds a small amount of digital information to existing analogue AM broadcasts on short-, medium- and long-wave, giving similar functionality to that provided by the Radio Data System (RDS) on the FM bands. The system has been designed within the Digital Radio Mondiale (DRM) consortium, primarily to ease the transition from analogue to digital broadcasting. A suitably-equipped receiver will allow selection of the AM service by name as well as the choice of re-tuning to other frequencies carrying analogue or digital versions of the same or a related service. Several AMSS transmissions are already on air and some, if not all, of the first consumer DRM receivers will incorporate AMSS decoding. If you’re listening to an AM broadcast on the short-, medium- or long-wave bands, the answer to the question in the title has traditionally been a resounding “no”. Currently, the only way for a listener to identify an AM broadcast is to wait for a station’s ident or jingle to be played. Without an up-to-date copy of the World TV and Radio Handbook or Passport to World Band Radio to hand, or an Internet connection available, it can be difficult to identify an AM station from the plethora available. With increasing numbers of broadcasters switching on Digital Radio Mondiale (DRM) [1] broadcasts, the DRM consortium started to think about how the transition for broadcasters and listeners from AM to DRM could be eased. -

Amplitude Modulation
EE/TE 4385 Lab 4: AM (De)Modulation Lab Report Due: 9/27/06, 2PM, Amplitude (De)Modulation: LabVIEW Implementation Introduction: Modulation is a process by which characteristics of a high-frequency carrier signal are altered to convey information contained in a lower-frequency message. Though it is theoretically possible to transmit baseband signals (or information) without modulating the data, it is far more efficient to send messages by modulating the information onto a carrier wave. High frequency waveforms require smaller antennae for reception, efficiently use available bandwidth, and are flexible enough to carry different types of data. There are a variety of modulation schemes available for both analog and digital modulation. Background: Amplitude Modulation (AM) is an analog modulation scheme where the amplitude (A) of a fixed-frequency carrier signal is continuously modified to represent data in a message. The carrier signal is generally a high frequency sine wave used to “carry” the information on the envelope of the message. The result is a double-sideband signal, centered on the carrier frequency, with twice the bandwidth of the original signal. Figure 1 - Time domain of an AM signal Carrier Signal Modulated AM sidebands Figure 2 – Frequency domain of an AM signal The following algorithm is commonly used to represent amplitude modulation: Gathering like terms and simplifying the equation leaves: y(f) = A(1 + k sin( mt + ))sin( ct) The main advantage of using AM modulation is that it has a very simple circuit implementation (especially for reception), creating widespread adoption quickly. AM modulation however wastes power and bandwidth in a signal. -
Amplitude Modulation (AM), Frequency Modulation (FM), Phase Modulation (PM) 2
MODULE 5 COMMUNICATION SYSTEMS Quote of the day “Imagination is more important than knowledge. For knowledge is limited to all we now know and understand, while imagination embraces the entire world, and all there ever will be to know and understand” ―Albert Einstein. ANALOG TRANSMISSION OF DATA •Analog Transmission occurs when the signal sent over the transmission media continuously varies from one state to another in a wave-like pattern (e.g. Sine wave, triangular wave). • Before we get further into Analog transmission, we need to understand various characteristics of analog transmission. Periodic Signals Sine Wave • General Sine wave: s(t) Asin(2ft ) • Peak Amplitude (A) – maximum strength of signal – volts • Frequency (f) – Rate of change of signal – Hertz (Hz) or cycles per second – Period = time for one repetition (T) – T = 1/f • Phase () – Relative position in time, from 0-2*pi Varying Sine Waves Wavelength • Distance occupied by one cycle • = Wavelength • Assuming signal velocity v – = vT – f = v – c = 3*108 ms-1 (speed of light in free space) – = c/f Addition of Frequency Components Notes: 2nd freq a multiple of 1st 1st called fundamental freq Others called harmonics Period of combined = Period of the fundamental Frequency Domain Discrete Freq Rep: s(t) 4/[sin(2ft) 1/3sin(2(3 f )t)] Any continuous signal can be represented as the sum of sine waves! (May need an infinite number..) Discrete signals result in Continuous, Infinite Frequency Rep: s(t)=1 from –X/2 to X/2 Data Rate and Bandwidth • Any transmission system has a limited band of frequencies • This limits the data rate that can be carried • Spectrum – range of frequencies contained in signal • Absolute bandwidth – width of spectrum • Effective bandwidth – Often just bandwidth – Narrow band of frequencies containing most of the energy ELEMENTS OF COMMUNICATION SYSTEMS What is modulation? • Modulation is the process of putting information onto a high frequency carrier for transmission (frequency translation). -
Theory and Implementation of RF-Input Outphasing Power Amplification Taylor W
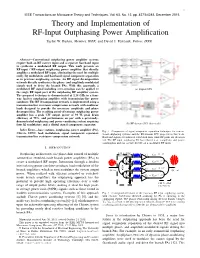
1 Theory and Implementation of RF-Input Outphasing Power Amplification Taylor W. Barton, Member, IEEE, and David J. Perreault, Fellow, IEEE Abstract—Conventional outphasing power amplifier systems require both an RF carrier input and a separate baseband input to synthesize a modulated RF output. This work presents an RF-input / RF-output outphasing power amplifier that directly amplifies a modulated RF input, eliminating the need for multiple costly IQ modulators and baseband signal component separation as in previous outphasing systems. An RF signal decomposition network directly synthesizes the phase- and amplitude-modulated signals used to drive the branch PAs. With this approach, a modulated RF signal including zero-crossings can be applied to (a) Digital SCS the single RF input port of the outphasing RF amplifier system. The proposed technique is demonstrated at 2.14 GHz in a four- way lossless outphasing amplifier with transmission-line power combiner. The RF decomposition network is implemented using a transmission-line resistance compression network with nonlinear loads designed to provide the necessary amplitude and phase decomposition. The resulting proof-of-concept outphasing power amplifier has a peak CW output power of 93 W, peak drain efficiency of 70%, and performance on par with a previously- demonstrated outphasing and power combining system requiring four IQ modulators and a digital signal component separator. (b) RF-domain SCS (this work) Index Terms—base stations, outphasing, power amplifier (PA), Fig. 1. Comparison of signal component separation techniques for conven- Chireix, LINC, load modulation, signal component separator, tional outphasing systems and the RF-domain SCS proposed in this work. -
Radio Theory the Basics Radio Theory the Basics Radio Wave Propagation
Radio Theory The Basics Radio Theory The Basics Radio Wave Propagation Radio Theory The Basics Electromagnetic Spectrum Radio Theory The Basics Radio Theory The Basics • Differences between Very High Frequency (VHF) and Ultra High Frequency (UHF). • Difference between Amplitude Modulation (AM) and Frequency Modulation (FM). • Interference and the best methods to reduce it. • The purpose of a repeater and when it would be necessary. Radio Theory The Basics VHF - Very High Frequency • Range: 30 MHz - 300 MHz • Government and public service operate primarily at 150 MHz to 174 MHz for incidents • 150 MHz to 174 MHz used extensively in NIFC communications equipment • VHF has the advantage of being able to pass through bushes and trees • VHF has the disadvantage of not reliably passing through buildings • 2 watt VHF hand-held radio is capable of transmitting understandably up to 30 miles, line-of-sight Radio Theory The Basics VHF ABSOLUTE MAXIMUM RANGE OF LINE-OF-SITE PORTABLE RADIO COMMUNICATIONS 165 MHz CAN TRANSMIT ABOUT 200 MILES Radio Theory The Basics UHF - Ultra High Frequency • 300 MHz - 3,000 MHz • Government and public safety operate primarily at 400 MHz to 470 MHz for incidents Radio Theory The Basics UHF - Ultra High Frequency • 400 MHz to 420 MHz used in NIFC equipment primarily for logistical communications and linking • Advantage of being able to transmit great distances (2 watt UHF hand-held can transmit 50 miles maximum…line-of-sight in ideal conditions) • UHF signals tend to “bounce” off of buildings and objects, making them -

EE133 Winter 2004 1
Prelab 1 - AM Modulation - Prof. Dutton - EE133 Winter 2004 1 EE133 - Prelab 1 Amplitude Modulation and Demodulation 1 Introduction This week we will be taking a look at the amplitude modulation (AM) scheme. In this process, the amplitude of the carrier signal is varied so that it is proportional to the instantaneous amplitude of the modulating signal. With the invention of oscillators, this scheme quickly supplanted the first spark-gap transmitters. They did so because AM supported the easy transmission of voice while allowing more people to transmit without interfering with each other. For an oscillating electrical signal to be transmitted through the air, it must first be converted into elec- tromagnetic radiation. To maximize efficiency of transmission, the physical dimensions of the transmitting and receiving antennas must be on the same order of magnitude as the wavelength of the transmitted signal (often a quarter wavelength). For audio signals, whose frequencies range from 20 Hz to 20 kHz, this corre- sponds to wavelengths from 15 to 15000 km. As you can probably guess, an antenna of this length would be absurd for general applications. AM solves this problem by using a ’slow’ moving audio signal to modulate a fast moving, radio signal. The fast signal is called the carrier signal, and the audio frequency signal is typically called the modulating signal. Typical carrier frequencies range from 30 kHz to upwards of 30 GHz. By using a carrier frequency, users can ’tune’ into a particular transmitter. With the old spark-gap transmit- ters, every user heard all transmitters that were within range.