A Velocity Prediction Procedure for Sailing Yachts with a Hydrodynamic
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Spring 1988 International Sunfish® Class Association Vol
windwardle The Official Newsletter of the Spring 1988 International Sunfish® Class Association Vol. II, No. 6 · ~ : . .I RETROSPECT: Jack Evans Looks Back (Part 1) ~ by Charlot Ras-A/lard It's hard to believe that the Sunfish (and its predecessor, the Sailfish) dates back 40 years. Twenty five North American champions have been crowned, and countless sailors from the America's Cup on down have raced the 'Fish at some point. Few had the vantage points that Jack Evans had. The scoreboard shows he garnered four Sailfish national titles between 1967 and 1970, was runner up at the 1974 Force 5 North Americans, won the first Super Sunfish North American Championship in 1975, sailed the C-Ciass catamaran, Weathercock, at the 1972 Little America's Cup in Australia, and, of course, earned the right to sail with a silver Sunfish on his sail at the 1972 North Americans at Sayville. Evans gained another perspective through his work " wearing many hats" at Alcort from 1969-1977, most notably as Class Secretary from 1969-1975. He later went on to: design and market the Phantom, become a Regional Sales Representative for Hobie, write the book " Techniques of One-Design Rac ing, " and testify in a Congressional hearing on the merits of Micron 33 while working at International Paint, Inc. Currently, he is employed by Beckson Marine, Inc. in Bridgeport, Connecticut. ) caught up with Jack at the 1988 New York Boat Show and later at his home in Guilford, Connecticut, reuniting after a "few" years. In part 1, I take a look back at the Sunfish and its past. -

Seacare Authority Exemption
EXEMPTION 1—SCHEDULE 1 Official IMO Year of Ship Name Length Type Number Number Completion 1 GIANT LEAP 861091 13.30 2013 Yacht 1209 856291 35.11 1996 Barge 2 DREAM 860926 11.97 2007 Catamaran 2 ITCHY FEET 862427 12.58 2019 Catamaran 2 LITTLE MISSES 862893 11.55 2000 857725 30.75 1988 Passenger vessel 2001 852712 8702783 30.45 1986 Ferry 2ABREAST 859329 10.00 1990 Catamaran Pleasure Yacht 2GETHER II 859399 13.10 2008 Catamaran Pleasure Yacht 2-KAN 853537 16.10 1989 Launch 2ND HOME 856480 10.90 1996 Launch 2XS 859949 14.25 2002 Catamaran 34 SOUTH 857212 24.33 2002 Fishing 35 TONNER 861075 9714135 32.50 2014 Barge 38 SOUTH 861432 11.55 1999 Catamaran 55 NORD 860974 14.24 1990 Pleasure craft 79 199188 9.54 1935 Yacht 82 YACHT 860131 26.00 2004 Motor Yacht 83 862656 52.50 1999 Work Boat 84 862655 52.50 2000 Work Boat A BIT OF ATTITUDE 859982 16.20 2010 Yacht A COCONUT 862582 13.10 1988 Yacht A L ROBB 859526 23.95 2010 Ferry A MORNING SONG 862292 13.09 2003 Pleasure craft A P RECOVERY 857439 51.50 1977 Crane/derrick barge A QUOLL 856542 11.00 1998 Yacht A ROOM WITH A VIEW 855032 16.02 1994 Pleasure A SOJOURN 861968 15.32 2008 Pleasure craft A VOS SANTE 858856 13.00 2003 Catamaran Pleasure Yacht A Y BALAMARA 343939 9.91 1969 Yacht A.L.S.T. JAMAEKA PEARL 854831 15.24 1972 Yacht A.M.S. 1808 862294 54.86 2018 Barge A.M.S. -

Barry's Still Making Waves.Pdf
Barry's still making waves By DAVID BRASCH “We got flogged by a boat BARRY Russell would called Venom, designed pardon the pun, but he’s and sailed by Bob Miller been sailing along since he who later changed his took up greyhound racing name to Ben Lexcen. 20 years ago. Lexcen would go on to be Russell, 68, his wife a great 12-metre Maureen and sons Darren designer,” said Barry. and Andrew, have Even though the world achieved more than their title opposition in fair share of success with Brisbane was too tough gallopers like Tears For for Russell, he caught the Jupiter, Tough Hombre, eye. “I got a phone call Huge Day Hughie etc. just after that from Frank But Barry has been sailing McKnoulty, a great 18ft along all his life ... sailor, to try out for the 12 literally. metres.” A born and bred Balmain Packer was putting boy, Barry boasts a sailing together Australia’s first career which took him to America’s Cup challenge. the ultimate of ocean He made the crew and for racing, the 12 metre months sailed a US boat America’s Cup challenge, called Vim which Packer and took him there twice. had leased to train his Barry was part of the Sir team. Frank Packerbacked challenge by Gretel in 1962 Barry went to Newport on Rhode Island just and Gretel II in 1970, challenges which north of New York to take on the invincible eventually paved the way for Allan Bond’s Yanks. Australia II to win the thing in 1983. -

Small Boats on a Big Lake: Underwater Archaeological Investigations of Wisconsin’S Trading Fleet 2007-2009
Small Boats on a Big Lake: Underwater Archaeological Investigations of Wisconsin’s Trading Fleet 2007-2009 State Archaeology and Maritime Preservation Technical Report Series #10-001 Keith N. Meverden and Tamara L. Thomsen ii Funded by grants from the University of Wisconsin Sea Grant Institute, National Sea Grant College Program, and the Wisconsin Department of Transportation’s Transportation Economics Assistance program. This report was prepared by the Wisconsin Historical Society. The statements, findings, conclusions, and recommendations are those of the authors and do not necessarily reflect the views of the University of Wisconsin Sea Grant Institute, the National Sea Grant College Program, or the Wisconsin Department of Transportation. The Big Bay Sloop was listed on the National Register of Historic Places on 14 January 2009. The Schooner Byron was listed on the National Register of Historic Places on 20 May 2009. The Green Bay Sloop was listed on the National Register of Historic Places On 18 November 2009. Nominations for the Schooners Gallinipper, Home, and Northerner are pending listing on the National Register of Historic Places. Cover photo: Wisconsin Historical Society archaeologists survey the wreck of the schooner Northerner off Port Washington, Wisconsin. Copyright © 2010 by Wisconsin Historical Society All rights reserved iii CONTENTS ILLUSTRATIONS…………………..………………………….. iv ACKNOWLEDGEMENTS…………………………………….. vii Chapter 1. INTRODUCTION………………………………………. ….. 1 Research Design and Methodology……………………… 3 2. LAKESHORING, TRADING, AND LAKE MICHIGAN MERCHANT SAIL………………………………………….. 5 Sloops…………………………………………………… 7 Schooners……………………………………………….. 8 Merchant Sail on Lake Michigan………………………. 12 3. THE BIG BAY SLOOP……………………………………... 14 The Mackinaw Boat……………………………………. 14 Site Description………………………………………… 16 4. THE GREEN BAY SLOOP………………………………… 26 Site Description………………………………………… 27 5. THE SCHOONER GALLINIPPER ………………………… 35 Site Description………………………………………… 44 6. -

You Are Invited to Attend
You are invited to attend THE AUSTRALIA II “Australia II winning Hear never before told stories 26th September 2013 of this monumental sporting feat 12:00PM - 3:00PM the America’s Cup in THE HILTON SYDNEY and how it all unfolded. 1983 was undoubtedly Tickets A unique panel featuring one of the greatest $297 PER TICKET Skipper John Bertrand and 12 $2970 PER TABLE OF TEN achievements in of the legendary Australia II crew Australian sporting To book together with Syndicate Chairman COMPLETE AND RETURN A BOOKING FORM ENQUIRIES: ALANA EMBLEN, history” Alan Bond. THE HURRICANE EVENT GROUP - PHONE: 02 9356 2900 Ocial Media Partner WARREN JONES FOUNDATION INC. FUNDS RAISED AT THIS LUNCHEON WILL SUPPORT JUNIOR ELITE ATHLETES AND WILL BE SPLIT BETWEEN THE AUSTRALIAN SAILING TEAM - THE WARREN JONES FOUNDATION - THE SPORT AUSTRALIA HALL OF FAME SCHOLARSHIP & MENTORING PROGRAM. THE AUSTRALIA II ORDER FORM / TAX INVOICE The Hurricane Event Group Pty Ltd (ABN 65 099 766 677) 109/ 8 Clarke St, Crows Nest NSW 2065 BOOKING DETAILS Company Name Contact Name Address Phone Email --------------------------------------------------------------------------------------------- LUNCHEON DETAILS TICKETS The Australia II 30 Year Celebration Lunch Tables of Ten: 26th September 2013 - From 12:00pm – 3:00pm (10) Guests $2,970 inc GST The Hilton Grand Ballroom Individual Tickets: 488 George Street, Sydney NSW $297 Inc GST --------------------------------------------------------------------------------------------- CORPORATE BOOKINGS SPORTS SUPPORTERS BOOKINGS ______ x -
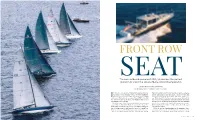
The New Outboard-Powered MJM 53Z Provides the Perfect Platform To
FRONT ROW TheSEAT new outboard-powered MJM 53z provides the perfect platform to watch the 2019 12 Metre World Championship STORY BY PIM VAN HEMMEN PHOTOGRAPHY BY ONNE VAN DER WAL t’s almost 10 a.m. and the 12 Metres have headed out to the like Bob’s going to back in and execute a reverse 90-degree racecourse for the third day of the 2019 World Champion- turn in tight quarters. But instead, he enters bow first and I ships. Except for a lone tender, the docks at Fort Adams noses the 53z right up to the black RIB at the inside cor- in Newport, Rhode Island, are empty. Then, MJM Yachts CEO ner. With about 5 feet of spare operating room, Bob jockeys Bob Johnstone pulls up in Breeze, the builder’s first 53z and Breeze’s 56-foot-long hull back and forth until her stern clears the company’s new flagship. the tip of dock 7B. Then, he backs her into the slip. He brings The day before, a lack of wind had delayed the races and her in close enough so the dockhand can grab the sternline caused Bob and his wife, Mary, to spend 10 hours on the without having to bend over, and then brings the bow in so I water. Mary, an expert boater in her own right, is taking the can grab the bowline. day off from racing to find herself a dress for tonight’s 12 l tie it off, and as I finish making up the springline, Bob’s Metre social event at Marble House mansion. -

The Gift of Freedom War, Debt, and Other Refugee Passages the Gift of Freedom
MIMI THI NGUYEN The Gift of Freedom WAR, DEBT, And OTHER REFUGEE PASSAGES The Gift of Freedom NEXT WAVE: NEW DIRECTIONS IN WOMEN’S STUDIES A series edited by Inderpal Grewal, Caren Kaplan, and Robyn Wiegman MIMI THI NGUYEN The Gift of Freedom WAR, DEBT, AND OTHER REFUGEE PASSAGES Duke University Press Durham and London 2012 ∫ 2012 Duke University Press All rights reserved Printed in the United States of America on acid-free paper ! Designed by C. H. Westmoreland Typeset in Minion with Stone Sans display by Keystone Typesetting, Inc. Library of Congress Cataloging-in- Publication Data appear on the last printed page of this book. FOR MY PARENTS, HIEP AND LIEN, AND MY BROTHER, GEORGE CONTENTS Preface ix Acknowledgments xiii Introduction. The Empire of Freedom 1 1. The Refugee Condition 33 2. Grace, the Gift of the Girl in the Photograph 83 3. Race Wars, Patriot Acts 133 Epilogue. Refugee Returns 179 Notes 191 Bibliography 239 Index 267 PREFACE Rebuilding Iraq will require a sustained commitment from many nations, in- cluding our own: we will remain in Iraq as long as necessary, and not a day more. America has made and kept this kind of commitment before—in the peace that followed a world war. After defeating enemies, we did not leave behind occupy- ing armies, we left constitutions and parliaments. We established an atmosphere of safety, in which responsible, reform-minded local leaders could build lasting institutions of freedom. In societies that once bred fascism and militarism, liberty found a permanent home. —GEORGE W. BUSH, February ≤∏, ≤≠≠≥ And there we are, ready to run the great Yankee risk. -

AYC Trophies
1 Perpetual Trophies WEDNESDAY NIGHT SERIES TROPHIES Charles Dell Trophy Presented by Past Commodore Charles Dell. Best Performance in Fleet, Wednesday Night Series. 1975 S. Thomas Wheatley 1996 Robert Reeves A Train 1976 not awarded 1997 Brad Parker Sugar 1977 Kenneth Jones Copasetic 1998 Caple/Hughes Syn. Zulu Warrior 1978 not awarded 1999 Peter Schellie Freedom 1979 Arthur C. Holmes Sherlock 2000 John Sherwood Grace 1980 not awarded 2001 Jeff Todd Hot Toddy 1981 Chuck Millican Class 2002 Jim Konigsberg Inigo 1982 C. R. Smith, Jr. Uh Oh 2003-2004 not awarded 1983 Larry Leonard, Jr. Down Under 2005 Peter Schellie Freedom 1984 Lauck Lanahan Seawitch 2006 Steve Bardelman Valhalla 1985 David Saunders Air Mail 2007 Kevin McNeil Frequent Flyer 1986 Ben Michaelson Quintessence 2008 Tom Walsh Four Little Ducks 1987 Ladd/Muller Timberwolf 2009 Jim Konigsburg Inigo 1988 Bruce Johnson Pussycat 2010 Walsh/Potvin Slam Duck 1989-1990 Muller/Staley Only Child 2011-2012 S. Kaminer/J. Christofel Aunt Jean 1991 Ben Michaelson Quintessence 2013-2017 Salvesen/Lewis Synd. Mirage 1992 Len Eastman Hilite 2018 Gisela Shaughnessy Swiss Miss 1993 B. Miles Sidekick 2019 Lewis/Salvesen Mirage 1994 Steve Hiltabidle Crescendo 2020 T. Carter / A. Libby DogHouse 1995 Arthur Libby Results Harvey Clap Memorial Trophy Presented by Mrs. Harvey Clapp. Wednesday Night Series, IMS First Place. Rededicated in 2005 for Best Performance in the Etchells Fleet, Wednesday Night Series. 1985 Alan Harquail Blue Fish 2008 B & T Syndicate 1153 1986 Ben Michaelson Quintessence 2009-2011 Jose Fuentes Caramba 1987 Bert Jabin Ramrod 2012-2013 Ed Holt Special Ed 1988 Halle/MacQuill Leading Edge 2014 Jose Fuentes Caramba 1989-1990 Closs/Closs Fun 2015 C. -
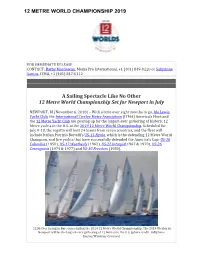
12 METRE WORLD CHAMPIONSHIP 2019 a Sailing Spectacle Like No
12 METRE WORLD CHAMPIONSHIP 2019 FOR IMMEDIATE RELEASE CONTACT: Barby MacGowan, Media Pro International, +1 (401) 849-0220 or SallyAnne Santos, ITMA, +1 (401) 847-0112 A Sailing Spectacle Like No Other 12 Metre World Championship Set for Newport in July NEWPORT, RI (November 6, 2018) – With a little over eight months to go, Ida Lewis Yacht Club, the International Twelve Metre Association (ITMA) America’s Fleet and the 12 Metre Yacht Club are gearing up for the largest-ever gathering of historic 12 Metre yachts in the U.S. at the 2019 12 Metre World Championship. Scheduled for July 8-13, the regatta will host 24 teams from seven countries, and the fleet will include Italian Patrizio Bertelli’s US-12 Nyala, which is the defending 12 Metre World Champion, and five yachts that have successfully defended the America’s Cup: US-16 Columbia (1958), US-17 Weatherly (1962), US-22 Intrepid(1967 & 1970), US-26 Courageous (1974 & 1977) and US-30 Freedom (1980). 12 Metres racing in Barcelona during the 2014 12 Metre World Championship. The 2019 Worlds in Newport will be the largest-ever gathering of 12 Metres in the U.S. (photo credit: SallyAnne Santos/Windlass Creative) 12 METRE WORLD CHAMPIONSHIP 2019 “The last 12 Metre World Championship was in Barcelona, Spain in 2014,” said Event Chair Peter Gerard, “so there is some pent-up energy for sure. Over the last two years, there has been an emphasis on developing new teams, training for the worlds and getting these iconic yachts into the best possible condition for competition.” Making the trip to Newport from overseas are teams from the Northern Europe and Southern Europe Fleets. -

12 Metre World Championship 2019
12 METRE WORLD CHAMPIONSHIP 2019 FOR IMMEDIATE RELEASE CONTACT: Barby MacGowan, Media Pro International, +1 (401) 849-0220 or SallyAnne Santos, ITMA, +1 (401) 847-0112 12 Metre Worlds Will Harken Back to America’s Cup Days in Newport NEWPORT, RI (March 21, 2019) – When the 12 Metre World Championship comes to Newport, R.I. this summer (July 8-13), the significance of the venue will not be lost on sailing buffs, or for that matter, on sports historians in general. The America’s Cup, one of the most famous competitions between countries, was held here in Newport 12 times from 1930 to 1983, and for nine of those times, from 1958 to 1983, the sailboat used to determine the winners was the 12 Metre, a single-masted sloop of approximately 68 feet (21 metres) in length. Scenes from the docks after Australia II won the 1983 America’s Cup (Photos by Gilles Martin-Raget) Click photo to download During the 12 Metre Cup years, thousands of sailors, support teams, families and spectators from around the world swarmed lower Thames Street and wharves such as Bannister’s where the 12 Metres and their teams headquartered during races that determined a final defender and challenger destined to spar one- on-one for the coveted silver ewer that was “The Cup”. The most memorable Cup in Newport was unfortunately its last; 1983 marked the first winning challenge to the New York Yacht Club, which had 12 METRE WORLD CHAMPIONSHIP 2019 successfully defended the Cup over a period of 132 years. An Australian syndicate representing the Royal Perth Yacht Club wrested the precious trophy from its decades-old resting place, breaking a winning streak that was the longest on record in any sport. -
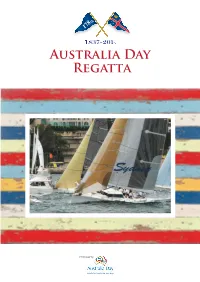
Open in New Window
8th 17 1837-2014 Australia Day Regatta Endorsed by Celebrating 92 YEARS OF BUILDING SUCCESS www.awedwards.com.au White Bay Cruise Terminal RAS Main Arena (Skoda Stadium) Newington College Liverpool Courthouse 8th 17 From the President This has been a time of double celebration for Sydney Harbour. In early October 2013, the International Fleet Review, which hosted ships from twenty nations, was a spectacular celebration of the 100th anniversary of the establishment of the Royal Australian Navy and commemorated the arrival of the first seven ships on 4 October 1913. Today’s celebration on Australia Day reminds us of our history, honours those who contributed to that history and celebrates the foundation of our nation. In doing so, we acknowledge the first Australians and pay respect to the Gadigal and Cammeragil people, recognising them as having been fine custodians of Sydney Harbour. On this 178th Australia Day Regatta on Sydney Harbour, hundreds of sailors and their families will participate in a wonderful spectacle on one of the world’s greatest waterways. The Anniversary Regatta, as it was then known, commenced in 1837 just one year after South Australia was proclaimed a colony and before Victoria, Queensland or Tasmania (it was still called Van Diemen’s Land) were formally declared provinces. There is no better way to mark the birth of a nation surrounded by sea and developed through our great maritime heritage than by participating in the Australia Day Regatta. We welcome all those who have entered their craft, large or small, old or new. With the support of our host clubs they will celebrate Australia Day on more than 20 different waterways. -

Seagrass Communities of the Gulf Coast of Florida: Status and Ecology
CLINTON J. DAWES August 2004 RONALD C. PHILLIPS GEROLD MORRISON CLINTON J. DAWES University of South Florida Tampa, Florida, USA RONALD C. PHILLIPS Institute of Biology of the Southern Seas Sevastopol, Crimea, Ukraine GEROLD MORRISON Environmental Protection Commission of Hillsborough County Tampa, Florida, USA August 2004 COPIES This document may be obtained from the following agencies: Tampa Bay Estuary Program FWC Fish and Wildlife Research Institute 100 8th Avenue SE 100 8th Avenue SE Mail Station I-1/NEP ATTN: Librarian St. Petersburg, FL 33701-5020 St. Petersburg, FL 33701-5020 Tel 727-893-2765 Fax 727-893-2767 Tel 727-896-8626 Fax 727-823-0166 www.tbep.org http://research.MyFWC.com CITATION Dawes, C.J., R.C. Phillips, and G. Morrison. 2004. Seagrass Communities of the Gulf Coast of Florida: Status and Ecology. Florida Fish and Wildlife Conservation Commission Fish and Wildlife Research Institute and the Tampa Bay Estuary Program. St. Petersburg, FL. iv + 74 pp. AUTHORS Clinton J. Dawes, Ph.D. Distinguished University Research Professor University of South Florida Department of Biology Tampa, FL 33620 [email protected] Ronald C. Phillips, Ph.D. Associate Institute of Biology of the Southern Seas 2, Nakhimov Ave. Sevastopol 99011 Crimea, Ukraine [email protected] Gerold Morrison, Ph.D. Director, Environmental Resource Management Environmental Protection Commission of Hillsborough County 3629 Queen Palm Drive Tampa, FL 33619 813-272-5960 ext 1025 [email protected] ii TABLE of CONTENTS iv Foreword and Acknowledgements 1 Introduction 6 Distribution, Status, and Trends 15 Autecology and Population Genetics 28 Ecological Roles 42 Natural and Anthropogenic Effects 49 Appendix: Taxonomy of Florida Seagrasses 55 References iii FOREWORD The waters along Florida’s Gulf of Mexico coastline, which stretches from the tropical Florida Keys in the south to the temperate Panhandle in the north, contain the most extensive and diverse seagrass meadows in the United States.