Microprocessors
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Intel® IA-64 Architecture Software Developer's Manual
Intel® IA-64 Architecture Software Developer’s Manual Volume 1: IA-64 Application Architecture Revision 1.1 July 2000 Document Number: 245317-002 THIS DOCUMENT IS PROVIDED “AS IS” WITH NO WARRANTIES WHATSOEVER, INCLUDING ANY WARRANTY OF MERCHANTABILITY, NONINFRINGEMENT, FITNESS FOR ANY PARTICULAR PURPOSE, OR ANY WARRANTY OTHERWISE ARISING OUT OF ANY PROPOSAL, SPECIFICATION OR SAMPLE. Information in this document is provided in connection with Intel products. No license, express or implied, by estoppel or otherwise, to any intellectual property rights is granted by this document. Except as provided in Intel's Terms and Conditions of Sale for such products, Intel assumes no liability whatsoever, and Intel disclaims any express or implied warranty, relating to sale and/or use of Intel products including liability or warranties relating to fitness for a particular purpose, merchantability, or infringement of any patent, copyright or other intellectual property right. Intel products are not intended for use in medical, life saving, or life sustaining applications. Intel may make changes to specifications and product descriptions at any time, without notice. Designers must not rely on the absence or characteristics of any features or instructions marked "reserved" or "undefined." Intel reserves these for future definition and shall have no responsibility whatsoever for conflicts or incompatibilities arising from future changes to them. Intel® IA-64 processors may contain design defects or errors known as errata which may cause the product to deviate from published specifications. Current characterized errata are available on request. Copies of documents which have an order number and are referenced in this document, or other Intel literature, may be obtained by calling 1-800- 548-4725, or by visiting Intel’s website at http://developer.intel.com/design/litcentr. -
Microprocessori
Microprocessori R.k.e. edizioni Antonio Pucci Microprocessori R.k.e. edizioni Indice Introduzione Cpu o microprocessore pagina 7 Il primo processore pagina 8 Elenco dei processori per anno pagina 11 Elenco dei processori per codice pagina 27 Net-o-grafia pagina 61 5 Introduzione CPU o microprocessore Un microprocessore spesso abbreviato con µP è esempio di microprocessore un componente elettronico digitale formato da permise di ridurre transistor racchiuso in uno significativamente i costi dei o più circuiti integrati. calcolatori. Uno o più processori sono Dagli anni 80 in poi i utilizzati come Cpu da un microprocessori sono sistema di elaborazione praticamente l’unica digitale come può essere un implementazione di Cpu. personal computer, un palmare, un telefono cellulare o un altro dispositivo digitale. La costruzione dei microprocessori fu resa possibile dall’avvento della tecnologia Lsi: integrando una Cpu completa in un solo chip 7 Il primo processore L’ obbiettivo del progetto era pre-programmate. Comunque sia nel 1971 equipaggiare il nuovo F-14 Il 17 settembre 1971 che nel 1976 Intel e Ti Tomcat che allora era in annunciò il modello Tms stipularono un accordo sviluppo. 1802 Nc, programmabile, in cui Intel pagava a Ti Il progetto venne che poteva essere i diritti per l’utilizzo del completato nel 1970 e utilizzato per implementare suo brevetto. Un riassunto utilizzava integrati mos per un calcolatore. della storia e contenuto nella il core della Cpu. L’ Intel 4004, processore a documentazione che Intel Il microprocessore Il proggetto era semplice e 4 Bit, venne presentato il 15 presentò in tribunale quando apparve appena la tecnologia innovativo e novembre 1971 e fu fu chiamata in giudizio da lo consentì dato che l’idea vinse sui competitori sviluppato da Federico Cyrix per violazione dei di integrare i componenti elettromeccanici Faggin. -
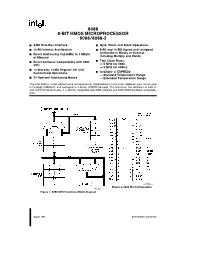
8088 8-Bit Hmos Microprocessor 8088 8088-2
8088 8-BIT HMOS MICROPROCESSOR 8088/8088-2 Y 8-Bit Data Bus Interface Y Byte, Word, and Block Operations Y 16-Bit Internal Architecture Y 8-Bit and 16-Bit Signed and Unsigned Arithmetic in Binary or Decimal, Y Direct Addressing Capability to 1 Mbyte of Memory Including Multiply and Divide Y Two Clock Rates: Y Direct Software Compatibility with 8086 CPU Ð 5 MHz for 8088 Ð 8 MHz for 8088-2 Y 14-Word by 16-Bit Register Set with Symmetrical Operations Y Available in EXPRESS Ð Standard Temperature Range Y 24 Operand Addressing Modes Ð Extended Temperature Range The Intel 8088 is a high performance microprocessor implemented in N-channel, depletion load, silicon gate technology (HMOS-II), and packaged in a 40-pin CERDIP package. The processor has attributes of both 8- and 16-bit microprocessors. It is directly compatible with 8086 software and 8080/8085 hardware and periph- erals. 231456±2 Figure 2. 8088 Pin Configuration 231456±1 Figure 1. 8088 CPU Functional Block Diagram August 1990 Order Number: 231456-006 8088 Table 1. Pin Description The following pin function descriptions are for 8088 systems in either minimum or maximum mode. The ``local bus'' in these descriptions is the direct multiplexed bus interface connection to the 8088 (without regard to additional bus buffers). Symbol Pin No. Type Name and Function AD7±AD0 9±16 I/O ADDRESS DATA BUS: These lines constitute the time multiplexed memory/IO address (T1) and data (T2, T3, Tw, T4) bus. These lines are active HIGH and float to 3-state OFF during interrupt acknowledge and local bus ``hold acknowledge''. -

Intel 8080 Datasheet
infel.. 8080A/8080A-1/8080A-2 8-BIT N-CHANNEL MICROPROCESSOR • TTL Drive Capability • Decimal, Binary, and Double Precision • 2,..,s (-1:1.3,..,s, -2:1.5 ,..,s) Instruction Arithmetic Cycle • Ability to Provide Priority Vectored • Powerful Problem Solving Instruction Interrupts Set • 512 Directly Addressed 110 Ports 6 General Purpose Registers and an Available In EXPRESS • Accumulator • - Standard Temperature Range 16-Blt Program Counter for Directly Available In 4Q-Lead Cerdlp and Plastic • Addressing up to 64K Bytes of Memory • Packages 16-Blt Stack Pointer and Stack (See Packaging Spec. Order #231369) • Manipulation Instructions for Rapid Switching of the Program Environment • The Intel 8080A is a complete 8-bit parallel central processing unit (CPU). It is fabricated on a single LSI chip using Intel's n-channel silicon gate MOS process. This offers the user a high performance solution to control and processing applications. The 8080A contains 6 8-bit general purpose working registers and an accumulator. The 6 general purpose registers may be addressed individually or in pairs providing both single and double precision operators. Arithmetic and logical instructions set or reset 4 testable flags. A fifth flag provides decimal arithmetic opera tion. The 8080A has an external stack feature wherein any portion of memory may be used as a last in/first out stack to store/retrieve the contents of the accumulator, flags, program counter, and all of the 6 general purpose registers. The 16-bit stack pointer controls the addressing of this external stack. This stack gives the 8080A the ability to easily handle multiple level priority interrupts by rapidly storing and restoring processor status. -

Computer Organization and Architecture Designing for Performance Ninth Edition
COMPUTER ORGANIZATION AND ARCHITECTURE DESIGNING FOR PERFORMANCE NINTH EDITION William Stallings Boston Columbus Indianapolis New York San Francisco Upper Saddle River Amsterdam Cape Town Dubai London Madrid Milan Munich Paris Montréal Toronto Delhi Mexico City São Paulo Sydney Hong Kong Seoul Singapore Taipei Tokyo Editorial Director: Marcia Horton Designer: Bruce Kenselaar Executive Editor: Tracy Dunkelberger Manager, Visual Research: Karen Sanatar Associate Editor: Carole Snyder Manager, Rights and Permissions: Mike Joyce Director of Marketing: Patrice Jones Text Permission Coordinator: Jen Roach Marketing Manager: Yez Alayan Cover Art: Charles Bowman/Robert Harding Marketing Coordinator: Kathryn Ferranti Lead Media Project Manager: Daniel Sandin Marketing Assistant: Emma Snider Full-Service Project Management: Shiny Rajesh/ Director of Production: Vince O’Brien Integra Software Services Pvt. Ltd. Managing Editor: Jeff Holcomb Composition: Integra Software Services Pvt. Ltd. Production Project Manager: Kayla Smith-Tarbox Printer/Binder: Edward Brothers Production Editor: Pat Brown Cover Printer: Lehigh-Phoenix Color/Hagerstown Manufacturing Buyer: Pat Brown Text Font: Times Ten-Roman Creative Director: Jayne Conte Credits: Figure 2.14: reprinted with permission from The Computer Language Company, Inc. Figure 17.10: Buyya, Rajkumar, High-Performance Cluster Computing: Architectures and Systems, Vol I, 1st edition, ©1999. Reprinted and Electronically reproduced by permission of Pearson Education, Inc. Upper Saddle River, New Jersey, Figure 17.11: Reprinted with permission from Ethernet Alliance. Credits and acknowledgments borrowed from other sources and reproduced, with permission, in this textbook appear on the appropriate page within text. Copyright © 2013, 2010, 2006 by Pearson Education, Inc., publishing as Prentice Hall. All rights reserved. Manufactured in the United States of America. -

Lecture Notes in Assembly Language
Lecture Notes in Assembly Language Short introduction to low-level programming Piotr Fulmański Łódź, 12 czerwca 2015 Spis treści Spis treści iii 1 Before we begin1 1.1 Simple assembler.................................... 1 1.1.1 Excercise 1 ................................... 2 1.1.2 Excercise 2 ................................... 3 1.1.3 Excercise 3 ................................... 3 1.1.4 Excercise 4 ................................... 5 1.1.5 Excercise 5 ................................... 6 1.2 Improvements, part I: addressing........................... 8 1.2.1 Excercise 6 ................................... 11 1.3 Improvements, part II: indirect addressing...................... 11 1.4 Improvements, part III: labels............................. 18 1.4.1 Excercise 7: find substring in a string .................... 19 1.4.2 Excercise 8: improved polynomial....................... 21 1.5 Improvements, part IV: flag register ......................... 23 1.6 Improvements, part V: the stack ........................... 24 1.6.1 Excercise 12................................... 26 1.7 Improvements, part VI – function stack frame.................... 29 1.8 Finall excercises..................................... 34 1.8.1 Excercise 13................................... 34 1.8.2 Excercise 14................................... 34 1.8.3 Excercise 15................................... 34 1.8.4 Excercise 16................................... 34 iii iv SPIS TREŚCI 1.8.5 Excercise 17................................... 34 2 First program 37 2.1 Compiling, -

Over View of Microprocessor 8085 and Its Application
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-ISSN: 2278-2834,p- ISSN: 2278-8735.Volume 10, Issue 6, Ver. II (Nov - Dec .2015), PP 09-14 www.iosrjournals.org Over view of Microprocessor 8085 and its application Kimasha Borah Assistant Professor, Centre for Computer Studies Centre for Computer Studies, Dibrugarh University, Dibrugarh, Assam, India Abstract: Microprocessor is a program controlled semiconductor device (IC), which fetches, decode and executes instructions. It is versatile in application and is flexible to some extent. Nowadays, modern microprocessors can perform extremely sophisticated operations in areas such as meteorology, aviation, nuclear physics and engineering, and take up much less space as well as delivering superior performance Here is a brief review of microprocessor and its various application Key words: Semi Conductor, Integrated Circuits, CPU, NMOS ,PMOS, VLSI I. Introduction: Microprocessor is derived from two words micro and processor. Micro means small, tiny and processor means which processes something. It is a single Very Large Scale of Integration (VLSI) chip that incorporates all functions of central processing unit (CPU) fabricated on a single Integrated Circuits (ICs) (1).Some other units like caches, pipelining, floating point processing arithmetic and superscaling units are additionally present in the microprocessor and that results in increasing speed of operation.8085,8086,8088 are some examples of microprocessors(2). The technology used for microprocessor is N type metal oxide semiconductor(NMOS)(3). Basic operations of microprocessor are fetching instructions from memory ,decoding and executing them ie it takes data or operand from input device, perform arithmetic and logical operations and store results in required location or send result to output devices(1).Word size identifies the microprocessor.E.g. -

45-Year CPU Evolution: One Law and Two Equations
45-year CPU evolution: one law and two equations Daniel Etiemble LRI-CNRS University Paris Sud Orsay, France [email protected] Abstract— Moore’s law and two equations allow to explain the a) IC is the instruction count. main trends of CPU evolution since MOS technologies have been b) CPI is the clock cycles per instruction and IPC = 1/CPI is the used to implement microprocessors. Instruction count per clock cycle. c) Tc is the clock cycle time and F=1/Tc is the clock frequency. Keywords—Moore’s law, execution time, CM0S power dissipation. The Power dissipation of CMOS circuits is the second I. INTRODUCTION equation (2). CMOS power dissipation is decomposed into static and dynamic powers. For dynamic power, Vdd is the power A new era started when MOS technologies were used to supply, F is the clock frequency, ΣCi is the sum of gate and build microprocessors. After pMOS (Intel 4004 in 1971) and interconnection capacitances and α is the average percentage of nMOS (Intel 8080 in 1974), CMOS became quickly the leading switching capacitances: α is the activity factor of the overall technology, used by Intel since 1985 with 80386 CPU. circuit MOS technologies obey an empirical law, stated in 1965 and 2 Pd = Pdstatic + α x ΣCi x Vdd x F (2) known as Moore’s law: the number of transistors integrated on a chip doubles every N months. Fig. 1 presents the evolution for II. CONSEQUENCES OF MOORE LAW DRAM memories, processors (MPU) and three types of read- only memories [1]. The growth rate decreases with years, from A. -

Appendix D an Alternative to RISC: the Intel 80X86
D.1 Introduction D-2 D.2 80x86 Registers and Data Addressing Modes D-3 D.3 80x86 Integer Operations D-6 D.4 80x86 Floating-Point Operations D-10 D.5 80x86 Instruction Encoding D-12 D.6 Putting It All Together: Measurements of Instruction Set Usage D-14 D.7 Concluding Remarks D-20 D.8 Historical Perspective and References D-21 D An Alternative to RISC: The Intel 80x86 The x86 isn’t all that complex—it just doesn’t make a lot of sense. Mike Johnson Leader of 80x86 Design at AMD, Microprocessor Report (1994) © 2003 Elsevier Science (USA). All rights reserved. D-2 I Appendix D An Alternative to RISC: The Intel 80x86 D.1 Introduction MIPS was the vision of a single architect. The pieces of this architecture fit nicely together and the whole architecture can be described succinctly. Such is not the case of the 80x86: It is the product of several independent groups who evolved the architecture over 20 years, adding new features to the original instruction set as you might add clothing to a packed bag. Here are important 80x86 milestones: I 1978—The Intel 8086 architecture was announced as an assembly language– compatible extension of the then-successful Intel 8080, an 8-bit microproces- sor. The 8086 is a 16-bit architecture, with all internal registers 16 bits wide. Whereas the 8080 was a straightforward accumulator machine, the 8086 extended the architecture with additional registers. Because nearly every reg- ister has a dedicated use, the 8086 falls somewhere between an accumulator machine and a general-purpose register machine, and can fairly be called an extended accumulator machine. -

Lecture 1: Course Introduction G Course Organization G Historical Overview G Computer Organization G Why the MC68000? G Why Assembly Language?
Lecture 1: Course introduction g Course organization g Historical overview g Computer organization g Why the MC68000? g Why assembly language? Microprocessor-based System Design 1 Ricardo Gutierrez-Osuna Wright State University Course organization g Grading Instructor n Exams Ricardo Gutierrez-Osuna g 1 midterm and 1 final Office: 401 Russ n Homework Tel:775-5120 g 4 problem sets (not graded) [email protected] n Quizzes http://www.cs.wright.edu/~rgutier g Biweekly Office hours: TBA n Laboratories g 5 Labs Teaching Assistant g Grading scheme Mohammed Tabrez Office: 339 Russ [email protected] Weight (%) Office hours: TBA Quizes 20 Laboratory 40 Midterm 20 Final Exam 20 Microprocessor-based System Design 2 Ricardo Gutierrez-Osuna Wright State University Course outline g Module I: Programming (8 lectures) g MC68000 architecture (2) g Assembly language (5) n Instruction and addressing modes (2) n Program control (1) n Subroutines (2) g C language (1) g Module II: Peripherals (9) g Exception processing (1) g Devices (6) n PI/T timer (2) n PI/T parallel port (2) n DUART serial port (1) g Memory and I/O interface (1) g Address decoding (2) Microprocessor-based System Design 3 Ricardo Gutierrez-Osuna Wright State University Brief history of computers GENERATION FEATURES MILESTONES YEAR NOTES Asia Minor, Abacus 3000BC Only replaced by paper and pencil Mech., Blaise Pascal, Pascaline 1642 Decimal addition (8 decimal figs) Early machines Electro- Charles Babbage Differential Engine 1823 Steam powered (3000BC-1945) mech. Herman Hollerith, -

Class-Action Lawsuit
Case 3:20-cv-00863-SI Document 1 Filed 05/29/20 Page 1 of 279 Steve D. Larson, OSB No. 863540 Email: [email protected] Jennifer S. Wagner, OSB No. 024470 Email: [email protected] STOLL STOLL BERNE LOKTING & SHLACHTER P.C. 209 SW Oak Street, Suite 500 Portland, Oregon 97204 Telephone: (503) 227-1600 Attorneys for Plaintiffs [Additional Counsel Listed on Signature Page.] UNITED STATES DISTRICT COURT DISTRICT OF OREGON PORTLAND DIVISION BLUE PEAK HOSTING, LLC, PAMELA Case No. GREEN, TITI RICAFORT, MARGARITE SIMPSON, and MICHAEL NELSON, on behalf of CLASS ACTION ALLEGATION themselves and all others similarly situated, COMPLAINT Plaintiffs, DEMAND FOR JURY TRIAL v. INTEL CORPORATION, a Delaware corporation, Defendant. CLASS ACTION ALLEGATION COMPLAINT Case 3:20-cv-00863-SI Document 1 Filed 05/29/20 Page 2 of 279 Plaintiffs Blue Peak Hosting, LLC, Pamela Green, Titi Ricafort, Margarite Sampson, and Michael Nelson, individually and on behalf of the members of the Class defined below, allege the following against Defendant Intel Corporation (“Intel” or “the Company”), based upon personal knowledge with respect to themselves and on information and belief derived from, among other things, the investigation of counsel and review of public documents as to all other matters. INTRODUCTION 1. Despite Intel’s intentional concealment of specific design choices that it long knew rendered its central processing units (“CPUs” or “processors”) unsecure, it was only in January 2018 that it was first revealed to the public that Intel’s CPUs have significant security vulnerabilities that gave unauthorized program instructions access to protected data. 2. A CPU is the “brain” in every computer and mobile device and processes all of the essential applications, including the handling of confidential information such as passwords and encryption keys. -

Professor Won Woo Ro, School of Electrical and Electronic Engineering Yonsei University the Intel® 4004 Microprocessor, Introdu
Professor Won Woo Ro, School of Electrical and Electronic Engineering Yonsei University The 1st Microprocessor The Intel® 4004 microprocessor, introduced in November 1971 An electronics revolution that changed our world. There were no customer‐ programmable microprocessors on the market before the 4004. It propelled software into the limelight as a key player in the world of digital electronics design. 4004 Microprocessor Display at New Intel Museum A Japanese calculator maker (Busicom) asked to design: A set of 12 custom logic chips for a line of programmable calculators. Marcian E. "Ted" Hoff Recognized the integrated circuit technology (of the day) had advanced enough to build a single chip, general purpose computer. Federico Faggin to turn Hoff's vision into a silicon reality. (In less than one year, Faggin and his team delivered the 4004, which was introduced in November, 1971.) The world's first microprocessor application was this Busicom calculator. (sold about 100,000 calculators.) Measuring 1/8 inch wide by 1/6 inch long, consisting of 2,300 transistors, Intel’s 4004 microprocessor had as much computing power as the first electronic computer, ENIAC. 2 inch 4004 and 12 inch Core™2 Duo wafer ENIAC, built in 1946, filled 3000‐cubic‐ feet of space and contained 18,000 vacuum tubes. The 4004 microprocessor could execute 60,000 operations per second Running frequency: 108 KHz Founders wanted to name their new company Moore Noyce. However the name sounds very much similar to “more noise”. "Only the paranoid survive". Moore received a B.S. degree in Chemistry from the University of California, Berkeley in 1950 and a Ph.D.