Technical Report on EV Laboratory Tests Ghent
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

2012 MODEL VIN CODES This VIN Chart Is Available Online At
2012 MODEL VIN CODES This VIN chart is available online at www.mitsubishicars.com. Select “Owners”, ⇒ “Support”, ⇒ “VIN Information”, then select the appropriate year. Use this chart to decode Vehicle Identification Numbers for 2012 model year MMNA vehicles. VEHICLE IDENTIFICATION NUMBER 4 A 3 1 K 2 D F * C E 123456 1. Country of Mfg. 12 − 17 Plant Sequence No. 4 = USA (MMNA) J = Japan (MMC) 2. Manufacturer 11. Assembly Plant A = Mitsubishi E = Normal (USA) U = Mizushima 3. Vehicle Type Z = Okazaki 3 = Passenger Car 4 = Multi−Purpose Vehicle 10. Model Year 4. Restraint System C = 2012 All with Front Driver and Passenger Air Bags Passenger Car 1 = 1st Row Curtain + Seat Air Bags 9. Check Digit 2 = 1st & 2nd Row Curtain + Seat Air Bags 7 = Seat Mounted Air Bags MPV up to 5,000 lbs GVWR 8. Engine/Electric Motor A = 1st & 2nd Row Curtain + Seat Air Bags F = 2.4L SOHC MIVEC (4G69) MPV over 5,000 lbs GVWR S = 3.8L SOHC (6G75) J = 1st & 2nd Row Curtain + Seat Air Bags T = 3.8L SOHC MIVEC (6G75) U = 2.0L DOHC MIVEC (4B11) 5 & 6. Make, Car Line & Series V = 2.0L DOHC TC/IC MIVEC (4B11) B2 = Mitsubishi Galant FE (Fleet Package) W = 2.4L DOHC MIVEC (4B12) B3 = Mitsubishi Galant ES/SE X = 3.0L MIVEC (6B31) H3 = Mitsubishi RVR ES/SE (FWD) (Canada only) J3 = Mitsubishi RVR SE (4WD) (Canada only) 1 = 49Kw Electric Motor (Y4F1) J4 = Mitsubishi RVR GT (4WD) (Canada only) K2 = Mitsubishi Eclipse GS (M/T) 7. Type K3 = Mitsubishi Eclipse GT A = 5−door Wagon/SUV (Outlander, Outlander Sport) K5 = Mitsubishi Eclipse GS (A/T) / GS Sport / SE D = 3−door Hatchback -

(2016) Driving Electric Vehicles at Highway Speeds: the Effect of Higher Driving Speeds on Energy Consumption and Driving Range for Electric Vehicles in Australia
MURDOCH RESEARCH REPOSITORY This is the author’s final version of the work, as accepted for publication following peer review but without the publisher’s layout or pagination. The definitive version is available at http://researchrepository.murdoch.edu.au/31284/ Wager, G., Whale, J. and Bräunl, T. (2016) Driving electric vehicles at highway speeds: The effect of higher driving speeds on energy consumption and driving range for electric vehicles in Australia. Renewable and Sustainable Energy Reviews, 63. pp. 158-165. http://researchrepository.murdoch.edu.au/31284/ Copyright: © 2016 Elsevier Ltd. Driving Electric Vehicles at Highway Speeds The effect of higher driving speeds on energy consumption and driving range for electric vehicles in Australia Guido Wager a*, Jonathan Whale b, Thomas Braunl a aThe University of Western Australia, School of Electrical Electronic and Computer Engineering Address: School of Electrical, Electronic and Computer Engineering The University of Western Australia (M018) 35 Stirling Highway CRAWLEY Western Australia 6009 Australia Phone: +61 8 6488 1763 [email protected], [email protected] bMurdoch University, School of Engineering and Information Technology, Department of Electrical Engineering, Energy & Physics, Address: School of Engineering and Information Technology Murdoch University 90 South Street MURDOCH, Western Australia 6150 Australia [email protected] *Corresponding Author Wager, Guido E-Mail: [email protected] Keywords: Electric vehicles, Fast-DC charging, battery management system, cell balance, drivable range. 1 Abstract Electric vehicles (EVs) have the potential to operate emission free and thus overcome many environmental and health issues associated with cars run on fossil fuels. Recharging time and driving range are amongst the biggest hurdles for the mainstream acceptance and implementation of EV technology. -
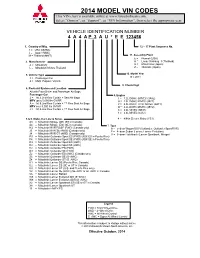
2014 MODEL VIN CODES This VIN Chart Is Available Online At
2014 MODEL VIN CODES This VIN chart is available online at www.mitsubishicars.com. Select “Owners”, ⇒ “Support”, ⇒ “VIN Information”, then select the appropriate year. VEHICLE IDENTIFICATION NUMBER 4 A 4 A P 3 A U * E E 123456 1. Country of Mfg. 12 − 17 Plant Sequence No. 4 = USA (MMNA) J = Japan (MMC) M = Thailand (MMT) 11. Assembly Plant E = Normal (USA) 2. Manufacturer H = Laem Chabang−3 (Thailand) A = Mitsubishi U = Mizushima (Japan) L = Mitsubishi Motors Thailand Z = Okazaki (Japan) 3. Vehicle Type 10. Model Year 3 = Passenger Car E = 2014 4 = Multi−Purpose Vehicle 9. Check Digit 4. Restraint System and Location All with Front Driver and Passenger Air Bags Passenger Car 8. Engine/Electric Motor 2 = 1st & 2nd Row Curtain + Seat Air Bags J = 1.2L DOHC (MIVEC (3A92) MPV up to 5,000 lbs GVWR U = 2.0L DOHC MIVEC (4B11) st A = 1st & 2nd Row Curtain + 1 Row Seat Air Bags V = 2.0L DOHC TC/IC MIVEC (4B11) MPV over 5,000 lbs GVWR W = 2.4L DOHC MIVEC (4B12) st J = 1st & 2nd Row Curtain + 1 Row Seat Air Bags X = 3.0L MIVEC (6B31) 3 = 2.4L MIVEC (4J12) 5 & 6. Make, Car Line & Series 4 = 49Kw Electric Motor (Y51) A3 = Mitsubishi Mirage (DE) (ES in Canada) A4 = Mitsubishi Mirage (ES) (SE in Canada) 7. Type H3 = Mitsubishi RVR ES/SE (FWD) (Canada only) A = 5−door Wagon/SUV (Outlander, Outlander Sport/RVR) J3 = Mitsubishi RVR SE (4WD) (Canada only) F = 4−door Sedan (Lancer, Lancer Evolution) J4 = Mitsubishi RVR GT (4WD) (Canada only) H = 5−door Hatchback (Lancer Sportback, Mirage) “i” MiEV P3 = Mitsubishi Outlander Sport ES (FWD) (ASX ES in Puerto Rico) P4 = Mitsubishi Outlander Sport SE (FWD) (ASX SE in Puerto Rico) R3 = Mitsubishi Outlander Sport ES (AWC) R4 = Mitsubishi Outlander Sport SE (AWC) D2 = Mitsubishi Outlander ES (FWD) D3 = Mitsubishi Outlander SE (FWD) Z2 = Mitsubishi Outlander ES (AWC) (Canada only) Z3 = Mitsubishi Outlander SE (S−AWC) Z4 = Mitsubishi Outlander GT (S−AWC) U1 = Mitsubishi Lancer DE (Puerto Rico, Canada) U2 = Mitsubishi Lancer ES (SE or GT in Canada) U8 = Mitsubishi Lancer GT (U.S. -
I-Miev FAQ (Frequently Asked Questions)
i-MiEV FAQ (Frequently Asked Questions) TABLE OF CONTENTS General 1 Battery & Charging 3 Performance 8 Maintenance 9 Price, Availability & Purchasing 9 Notes 10 General HOW FAR CAN THE MITSUBISHI I GO ON A SINGLE CHARGE? Based on independent EPA testing, the Mitsubishi i can travel 62 miles1 on a full charge, in typical driving conditions. Incidentally, the EPA’s MPGe ratings came in at 126 City and 99 Highway for a combined 112 MPGe—making the Mitsubishi i one of the most efficient electric vehicle in its class.2 HOW DO I KNOW IF THIS CAR IS RIGHT FOR ME? When considering whether or not the all-electric Mitsubishi is right for you, it’s important to remember that it’s designed for shorter city commutes. You should also keep in mind that the i-MiEV requires a parking area with access to a dedicated 120V / 15A power outlet for charging that’s been inspected by a certified electrician. If you have those two things covered, the Mitsubishi i could be your ideal commuter car. CAN I TAKE THE MITSUBISHI I ON LONGER TRIPS? The public charging infrastructure is developing to the point where we foresee that possibility. In fact, thousands of public quick-chargers are currently under development across the nation. So in the near future, you may be able to take your Mitsubishi i on longer journeys. CAN I USE IT AS MY PRIMARY VEHICLE? The Mitsubishi i could be used as a primary vehicle if all of your round trips are within the 62-mile range3 of the car. -

Clean Energy Vehicles Available in BC
Clean Energy Vehicles Available in BC Visit www.cevforbc.ca to learn more about clean energy vehicle incentives available to BC residents for 28 eligible vehicles. Follow us on twitter @cevforbc For events and test drives, follow facebook facebook.com/emotivebc Program administered by the New Car Dealers Association of BC on behalf of the Province of BC. If you have an old car you want to Electric vehicles (EVs) displaying scrap, all vehicles qualify for additional an official decal are allowed in high incentives through the BC Scrap-It occupancy vehicle (HOV) lanes in BC. Program: www.scrapit.ca. BEV - Battery Electric Vehicle FCV - Fuel Cell Vehicle PHEV - Plug-in Hybrid Electric Vehicle ER-EV - Extended Range Electric Vehicle Audi A3 e-tron BMW i3 BMW 330e** MSRP $40,900* MSRP $47,500 MSRP $52,100 PHEV Electric range: 26km BEV/ER-EV Electric range: 183km PHEV Electric range: 24km Full range: 605km Full range: 183-303km Full range: 580km CEVforBC™ incentive: $2,500 CEVforBC™ incentive: $5,000 CEVforBC™ incentive: $2,500 BMW X5 xDrive40e BMW 530e xDrive Chevrolet BOLT*** MSRP $74,950 MSRP $66,000 MSRP $42,795 PHEV Electric range: 23km BEV Electric range: 50km BEV Electric range: 383km Full range: 886km CEVforBC™ incentive: $2,500 Full range: 383km CEVforBC™ incentive: $2,500 CEVforBC™ incentive: $5,000 Chevrolet VOLT Chrysler Pacifica Hybrid*** Ford C-Max Energi MSRP $38,490 MSRP $56,495 MSRP $29,828 ER-EV Electric range: 85km PHEV Electric range: 53km PHEV Electric range: 33km Full range: 676km Full range: 911km Full range: 917km CEVforBC™ incentive: $5,000 CEVforBC™ incentive: $5,000 CEVforBC™ incentive: $2,500 Ford Focus EV Ford Fusion Energi Honda Clarity PHEV MSRP $33,698 MSRP $35,268 MSRP $39,900 BEV Electric range: 185km PHEV Electric range: 35km PHEV Electric range: 76km Full range: 185km Full range: 982km Full range: 547km CEVforBC™ incentive: $5,000 CEVforBC™ incentive: $2,500 CEVforBC™ incentive: $5,000 Vehicle list current as of June 2017. -

2019 MITSUBISHI OUTLANDER Updated Plug-In Hybrid
CARGAZING 2019 MITSUBISHI OUTLANDER Updated Plug-In Hybrid PRESS RELEASE he world’s first plug-in BY THE NUMBERS hybrid (PHEV) cross- Base price: $24,695 Tover and the best-sell- Wheelbase: 105.1 in. ing plug-in hybrid returns Length: 184.8 in. for 2019 with a host of new Width: 71.3 in. features and upgrades. Height: 67.3 in. Highlights include: Motor: 2.4L MIVEC • New exterior design SOHC 16-valve Inline enhancements to headlamp, 4-cylinder (ES, SE, SEL); front upper/lower grille, 3.0L MIVEC SOHC lower bumper skid plate/ 24-valve V6 (GT) garnish and 18-inch alloy Transmission: wheels. Continuously Variable • Front seats that provide Transmission (CVT) or more support and comfort. 6-speed Sportronic® • New window switch illu- automatic transmission mination on all doors and with paddle shifters auto up/down switch for all EPA mileage: 25 city, windows from driver side. • Available premium 30 highway leather‐appointed seats. • Combination soft‐touch tric motor is positioned seats. transaxle-style on the left • Power driver and pas- side of the gas engine and senger seats. has an output of 60 kW. The • Electric Park Brake with front motor is smaller and Auto Hold. lighter with a higher output • Enhanced quality interi- enhanced version of the or panel and door trim permanent magnet syn- accents. The Mitsubishi Outlander features a plethora of new features and upgrades to the only PHEV crossover with all-wheel chronous electric motor • Rear air vents and USB drive in its class. used in the Mitsubishi i-Mi- ports. E V. -

Audi-Skoda-Seat-Volkswagen …………………
CAT.NO.81014/E 2014 INDEX ACURA …………………………………………………………. 001-002 AUDI-SKODA-SEAT-VOLKSWAGEN ………………….. 003-063 BMW …………………………………………………………… 064-075 CHRYSLER …………………………………………………….. 076-081 CITROEN-PEUGEOT ………………………………………….. 082-096 DACIA ………………………………………………………….. 097-097 DAIHATSU …………………………………………………….. 098-100 DODGE ……………………………………………………….. 101-101 FIAT …………………………………………………………… 102-103 FORD ………………………………………………………….. 104-119 BUICK-CHEVROLET-GENERAL MOTORS …………… 120-134 GREAT WALL……………………………………………………. 135-135 HONDA ……………………………………………………….. 136-167 HYUNDAI …………………………………………………….. 168-185 INFINITI ………………………………………………………. 186-194 ISUZU ………………………………………………………… 195-197 KIA ……………………………………………………………. 198-202 LADA ………………………………………………………….. 203-203 LAND ROVER ………………………………………………… 204-207 LEXUS ………………………………………………………… 208-222 MAN …………………………………………………………… 223-223 MAZDA ……………………………………………………….. 224-245 MERCEDES BENZ ……………………………………………. 246-272 MITSUBISHI ………………………………………………….. 273-306 NISSAN ……………………………………………………….. 307-345 OPEL-DAEWOO ……………………………………………… 346-355 PORSCHE ……………………………………………………… 356-356 RENAULT ……………………………………………………… 357-370 SSANGYONG …………………………………………………. 371-372 SUBARU ………………………………………………………. 373-380 SUZUKI ……………………………………………………….. 381-388 TOYOTA ……………………………………………………….. 389-447 VOLVO ………………………………………………………… 448-449 ACURA GSP NO OE NO Description Illustration Application 516103 51393-S0X-A02 Bushing ACURA MDX YD1 2001-2006 516232 52345-SOX-A01 Control arm bushing ACURA MDX YD1 2001-2006 516387 53685-S3N-013 Control arm bushing ACURA MDX YD1 2001-2006 516475 51350-STX-A07 -

2012 MITSUBISHI I-Miev
2012 MITSUBISHI i-MiEV The Mitsubishi i-MiEV is an all-electric four-passenger vehicle, with “i” identifying the model and MiEV signifying “Mitsubishi innovative Electric Vehicle”. Its dimensions—larger than the Scion iQ but smaller than the Nissan Leaf—land it squarely between two vehicle size categories. The i-MiEV is a rear-wheel drive with a rear-mounted motor. Interior and trunk Since the vehicle is relatively tall, front access is easy. The seats are quite firm and not all that comfortable, with a rather short cushion and a bulge in the seatback that does not suit all body types. Given that the i-MiEV’s driving range is not conducive to long trips, the seats are tolerable for short periods. The driving position is far from optimal, with a fixed steering column and insufficient seat travel for tall people. The height-adjustment lever for the driver’s seat is rather flimsy. The driver’s seat has a seat warmer, and 2013 models will get one for the passenger seat. Narrow rear doors make it difficult to get in and harder still to get out. There is room for two, in relative comfort given the firmness of the seat. The seatback is split 60/40 and both sides recline to different angles. The rear head restraints must be removed to fold the backrests flat to the floor with the front seats pushed back. Headroom is relatively generous, but legroom is tight when the front seats are pushed back. Trunk space is rather modest with 52 cm from the sill to the back of the rear seat, but it gets quite interesting when the seatback is folded. -

Outlander PHEV 17MY Brochure
OUTLANDER PHEV 2017 THE UK’S BEST-SELLING PLUG-IN HYBRID “Detail changes on the outside help make what was already a thoroughly modern-looking SUV appear sleeker still, but it’s the interior that will have prospective owners jumping for joy.” Car magazine “The Outlander is now an entirely competent modern SUV, just one with the potential for a zero-emissions commute.” TopGear 2 THE ALL-ROUNDER WITH AN ACE UP ITS SLEEVE The Mitsubishi Outlander is, quite simply, a great all-round vehicle. it’s safe, providing a comprehensive package of active safety It’s just the right size, offering all the advantages of an SUV features to match just about any car at any price. But the without being too big around town. It’s exceedingly quiet and Mitsubishi Outlander PHEV also has a not-so-secret card up its exceptionally comfortable, enveloping you in a supportive hug no sleeve: it’s Britain’s most successful plug-in hybrid electric vehicle, matter how long the journey. It’s luxurious: even in the entry level taking over 60% of the plug-in hybrid segment in 2015 and model equipment is impressive, whilst the top of the range cars with over 25,000 PHEVs now on UK roads. It uses tomorrow’s list Nappa leather, heated seats all round (with a toasty leather technology today, helping to conserve our world’s finite resources; steering wheel to match), great lighting and a 360° camera. And and it can also save you money too – not just a little, but a lot! 3 “It’s a question of whether the slipper fits. -

Gints Birzietis, Janis Mistris, Aivars Birkavs Latvia University of Agriculture [email protected], [email protected], [email protected]
ENGINEERING FOR RURAL DEVELOPMENT Jelgava, 24.-25.05.2012. ELECTRIC VEHICLES FROM CAR MANUFACTURERS AND COMPARISON OF THEIR TECHNICAL CHARACTERISTICS Gints Birzietis, Janis Mistris, Aivars Birkavs Latvia University of Agriculture [email protected], [email protected], [email protected] Abstract. Nowadays, the electric vehicles are used more and more often. The spread of such vehicles is clearly facilitated by the rise of fossil fuel prices and environmental pollution resulting from the use of these fuels. In recent years all major automakers are seriously resorted to this issue by including in their model range also electric vehicles. Different solutions are applied in the design of electric vehicles that generally affect the overall characteristics of the vehicles. The aim of the present study is to analyze the technical characteristics of electric vehicles available already in the market and the performance of these vehicles depending on the technical parameters. The published technical information from electric vehicle manufacturer was used as a source information in this study. Keywords: electric vehicles, performance, technical characteristics. Introduction During the development of motor vehicle market there have been several attempts to put into production and sale the personal vehicles, which energy source is an electric battery. Starting from 2009 almost every car producer has presented conceptual models of their own electric vehicles in the world’s largest motor shows. In 2010, some carmakers began to offer in the market commercially available electric vehicles. Now it is possible to buy many newly designed electric vehicles from the car manufacturers, for example, “Mitsubishi i-MiEV”, “Nissan LEAF” and “Tesla Roadster” (Figure 1). -

Powering the Electric Cars with Dynamos
IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) ISSN: 2278-1684 Volume 3, Issue 2 (Sep-Oct. 2012), PP 01-05 www.iosrjournals.org Powering the Electric Cars with Dynamos T. Allen Prasad1, Lokesh Ramesh2 1, 2(Mechanical Department, Sri Sairam Institute Of Technology, India) Abstract: Our main objective in this paper is to power up the electric cars with dynamos. The major disadvantage we are facing in the electric car is that the charge in the battery which gives the supply for motor gets discharge and hence it should be stopped or parked in the area where the current should be easily taken. But the biggest problem is that when the car get loses its full charge while driving in an area where the current could not be taken easily or there is no sort of current in that area then you can’t able to reach your palace .Hence to change this problem the dynamos are used to solve it. Dynamo is a device which is capable of changing mechanical energy into electrical energy .Hence by using this character of the dynamo the problem can be solved. The description of this technique is that by placing one dynamo in each wheel so that each dynamo will produce a charge through the rotatory motion given by the wheels of the car and these charges is stored in a separate battery and that can be used for the emergency purpose and this process is cyclic. When car losses its charge while running on the charge produced by the dynamo, the dynamo will not stops its work, it again produce a charge so that you can go for a longer distance. -
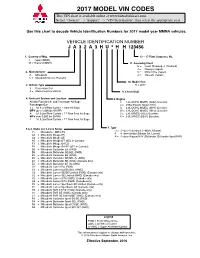
2017 MODEL VIN CODES This VIN Chart Is Available Online At
2017 MODEL VIN CODES This VIN chart is available online at www.mitsubishicars.com. Select “Owners” ⇒ “Support” ⇒ “VIN Information”, then select the appropriate year. Use this chart to decode Vehicle Identification Numbers for 2017 model year MMNA vehicles. VEHICLE IDENTIFICATION NUMBER J A 3 2 A 3 H U * H H 123456 1. Country of Mfg. 12 − 17 Plant Sequence No. J = Japan (MMC) M = Thailand (MMT) 11. Assembly Plant H = Laem Chabang−3 (Thailand) J = Nagoya (Japan) 2. Manufacturer U = Mizushima (Japan) A = Mitsubishi Z = Okazaki (Japan) L = Mitsubishi Motors Thailand 10. Model Year 3. Vehicle Type H = 2017 3 = Passenger Car 4 = Multi−Purpose Vehicle 9. Check Digit 4. Restraint System and Location 8. Engine All with Front Driver and Passenger Air Bags J = 1.2L DOHC MIVEC (3A92) Gasoline Passenger Car 4 = 49Kw Electric Motor (Y51) 2 = 1st & 2nd Row Curtain + Seat Air Bags U = 2.0L DOHC MIVEC (4B11) Gasoline MPV up to 5,000 lbs GVWR W = 2.4L DOHC MIVEC (4B12) Gasoline A = 1st & 2nd Row Curtain + 1st Row Seat Air Bags 3 = 2.4L MIVEC (4J12) Gasoline MPV over 5,000 lbs GVWR X = 3.0L MIVEC (6B31) Gasoline J = 1st & 2nd Row Curtain + 1st Row Seat Air Bags 5 & 6. Make, Car Line & Series 7. Type H = 5−door Hatchback (i−MiEV, Mirage) 15 = Mitsubishi i−MiEV ES F = 4−door Sedan (Mirage G4, Lancer) A3 = Mitsubishi Mirage ES A = 5−door Wagon/SUV (Outlander, Outlander Sport/RVR) A4 = Mitsubishi Mirage SE A5 = Mitsubishi Mirage GT (SEL in Canada) F3 = Mitsubishi Mirage G4 ES F4 = Mitsubishi Mirage G4 SE (SEL in Canada) D2 = Mitsubishi Outlander ES (FWD) D3