DESIGN and ANALYSIS of HIGH ALTITUDE PSEUDO SATELLITE (HAPS) Dr
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Proceedings of Spie
Volume holographic lens spectrum-splitting photovoltaic system for high energy yield with direct and diffuse solar illumination Item Type Article Authors Chrysler, Benjamin D.; Wu, Yuechen; Kostuk, Raymond K.; Yu, Zhengshan Citation Benjamin D. Chrysler, Yuechen Wu, Zhengshan Yu, Raymond K. Kostuk, "Volume holographic lens spectrum-splitting photovoltaic system for high energy yield with direct and diffuse solar illumination", Proc. SPIE 10368, Next Generation Technologies for Solar Energy Conversion VIII, 103680G (25 August 2017); doi: 10.1117/12.2273204; https://doi.org/10.1117/12.2273204 DOI 10.1117/12.2273204 Publisher SPIE-INT SOC OPTICAL ENGINEERING Journal NEXT GENERATION TECHNOLOGIES FOR SOLAR ENERGY CONVERSION VIII Rights © 2017 SPIE. Download date 28/09/2021 10:32:44 Item License http://rightsstatements.org/vocab/InC/1.0/ Version Final published version Link to Item http://hdl.handle.net/10150/627188 PROCEEDINGS OF SPIE SPIEDigitalLibrary.org/conference-proceedings-of-spie Volume holographic lens spectrum- splitting photovoltaic system for high energy yield with direct and diffuse solar illumination Benjamin D. Chrysler, Yuechen Wu, Zhengshan Yu, Raymond K. Kostuk Benjamin D. Chrysler, Yuechen Wu, Zhengshan Yu, Raymond K. Kostuk, "Volume holographic lens spectrum-splitting photovoltaic system for high energy yield with direct and diffuse solar illumination," Proc. SPIE 10368, Next Generation Technologies for Solar Energy Conversion VIII, 103680G (25 August 2017); doi: 10.1117/12.2273204 Event: SPIE Optical Engineering + Applications, 2017, San Diego, California, United States Downloaded From: https://www.spiedigitallibrary.org/conference-proceedings-of-spie on 3/30/2018 Terms of Use: https://www.spiedigitallibrary.org/terms-of-use Volume holographic lens spectrum-splitting photovoltaic system for high energy yield with direct and diffuse solar illumination Benjamin D. -

III-V-Based Optoelectronics with Low-Cost Dynamic Hydride Vapor Phase Epitaxy
crystals Article III-V-Based Optoelectronics with Low-Cost Dynamic Hydride Vapor Phase Epitaxy John Simon *, Kevin L. Schulte, Kelsey A. W. Horowitz, Timothy Remo, David L. Young and Aaron J. Ptak National Renewable Energy Laboratory, Golden, CO 80401, USA; [email protected] (K.L.S.); [email protected] (K.A.W.H.); [email protected] (T.R.); [email protected] (D.L.Y.); [email protected] (A.J.P.) * Correspondence: [email protected] Received: 27 September 2018; Accepted: 14 December 2018; Published: 20 December 2018 Abstract: Silicon is the dominant semiconductor in many semiconductor device applications for a variety of reasons, including both performance and cost. III-V materials exhibit improved performance compared to silicon, but currently, they are relegated to applications in high-value or niche markets, due to the absence of a low-cost, high-quality production technique. Here we present an advance in III-V materials synthesis, using a hydride vapor phase epitaxy process that has the potential to lower III-V semiconductor deposition costs, while maintaining the requisite optoelectronic material quality that enables III-V-based technologies to outperform Si. We demonstrate the impacts of this advance by addressing the use of III-Vs in terrestrial photovoltaics, a highly cost-constrained market. Keywords: HVPE; III-V semiconductors 1. Introduction Silicon as a semiconductor technology is beginning to run into significant technical limits. The death of Moore’s Law has been predicted for decades, but there is now a clear evidence that transistor size limits have been reached, and improvements are only being realized through increases in complexity and cost. -

III-V-Based Optoelectronics with Low-Cost Dynamic Hydride Vapor Phase Epitaxy John Simon, Kelsey Horowitz, Kevin L
III-V-based optoelectronics with low-cost dynamic hydride vapor phase epitaxy John Simon, Kelsey Horowitz, Kevin L. Schulte, Timothy Remo, David L. Young, and Aaron J. Ptak National Renewable Energy Laboratory, Golden, CO 80401, USA Silicon is the dominant semiconductor in many semiconductor device applications for a variety of reasons, including both performance and cost. III-V materials have improved performance compared to silicon, but currently they are relegated to applications in high-value or niche markets due to the absence of a low-cost, high-quality production technique. Here we present an advance in III-V materials synthesis using hydride vapor phase epitaxy that has the potential to lower III-V semiconductor deposition costs while maintaining the requisite optoelectronic material quality that enables III-V-based technologies to outperform Si. We demonstrate the impacts of this advance by addressing the use of III-Vs in terrestrial photovoltaics, a highly cost-constrained market. Silicon as a semiconductor technology is beginning to run into significant technical limits. The death of Moore’s Law has been predicted for decades, but there is now clear evidence that transistor size limits have been reached, and improvements are only being realized through increases in complexity and cost. Si is also rapidly approaching the practical limit for solar conversion efficiency with current best performance sitting at 26.6%1. In contrast to Si, III-V materials such as GaAs and GaInP have some of the best electronic and optical properties of any semiconductor materials. III-Vs have higher electron mobilities than Si, enabling transistors operating at high frequencies for wireless communication applications, and direct bandgaps that lead to extremely efficient absorption and emission of light. -

25Th Space Photovoltaic Research and Technology Conference
NASA/CP—2019-220051 25th Space Photovoltaic Research and Technology Conference Jeremiah S. McNatt, Compiler Glenn Research Center, Cleveland, Ohio February 2019 NASA STI Program . in Profi le Since its founding, NASA has been dedicated • CONTRACTOR REPORT. Scientifi c and to the advancement of aeronautics and space science. technical fi ndings by NASA-sponsored The NASA Scientifi c and Technical Information (STI) contractors and grantees. Program plays a key part in helping NASA maintain this important role. • CONFERENCE PUBLICATION. Collected papers from scientifi c and technical conferences, symposia, seminars, or other The NASA STI Program operates under the auspices meetings sponsored or co-sponsored by NASA. of the Agency Chief Information Offi cer. It collects, organizes, provides for archiving, and disseminates • SPECIAL PUBLICATION. Scientifi c, NASA’s STI. The NASA STI Program provides access technical, or historical information from to the NASA Technical Report Server—Registered NASA programs, projects, and missions, often (NTRS Reg) and NASA Technical Report Server— concerned with subjects having substantial Public (NTRS) thus providing one of the largest public interest. collections of aeronautical and space science STI in the world. Results are published in both non-NASA • TECHNICAL TRANSLATION. English- channels and by NASA in the NASA STI Report language translations of foreign scientifi c and Series, which includes the following report types: technical material pertinent to NASA’s mission. • TECHNICAL PUBLICATION. Reports of For more information about the NASA STI completed research or a major signifi cant phase program, see the following: of research that present the results of NASA programs and include extensive data or theoretical • Access the NASA STI program home page at analysis. -

Audi Models with a Solar Roof: Car Manufacturer Cooperates with Hanergy
Audi MediaInfo Corporate Communications Elise Pham Press Spokeswoman Procurement Telephone: +49 841 89 48168 E-mail: [email protected] www.audi-mediacenter.com Audi models with a solar roof: Car manufacturer cooperates with Hanergy Audi and Alta Devices, subsidiary of Hanergy, integrate thin-film solar cells into panoramic glass roofs Board of Management Member for Procurement Dr. Bernd Martens: “Solar technology extends the range of our electric vehicles and is also sustainable” First joint prototype by the end of 2017 Ingolstadt/Beijing/Sunnyvale, August 23, 2017 – Thin-film solar cells in panoramic glass roofs of Audi models: Audi and Alta Devices, a subsidiary of the Chinese solar-cell specialist, Hanergy, are working together on this development project. With this cooperation, the partners aim to generate solar energy to increase the range of electric vehicles. The first prototype is to be built by the end of 2017. As the first step, Audi and Hanergy want to integrate Alta Devices’ thin-film solar cells into a panoramic glass roof. In the future, almost the entire roof surface is to be covered with solar cells. The electricity they generate will flow into the car’s electrical system and can supply for example the air-conditioning system or the seat heaters – a gain in efficiency that has a direct positive impact on the range of an electric vehicle. “The range of electric cars plays a decisive role for our customers. Together with Hanergy, we plan to install innovative solar technology in our electric cars that will extend their range and is also sustainable,” stated Audi Board of Management Member for Procurement Dr. -

Vehicle-Integrated Photovoltaics (VIPV) As a Core Source for Electricity in Road Transport
VIPV POSITION PAPER Vehicle-integrated Photovoltaics (VIPV) as a core source for electricity in road transport www.etip-pv.eu Table of Contents 1. POLITICAL CONTEXT . 5 2. INTRODUCTION TO THE VIPV MARKET. 6 Edited by 2.1. Passenger Cars . 7 Kaining Ding, Forschungszentrum Jülich GmbH 2.2. Light- and Heavy-Duty Vehicles . 9 Written by 3. THE MOTIVATION FOR VIPV. 11 Olga Kanz, Forschungszentrum Jülich GmbH 3.1. General Benefits of VIPV. 11 Bianca Lim, Institut für Solarenergieforschung GmbH 3.2 VIPV Energy Flow Model . 13 3.3 Environmental Benefits in Comparison to the German Grid Mix. 14 Acknowledgement for Input by 4. REQUIREMENTS AND TO-DOS FOR VIPV . 16 Martin Heinrich (FhG-ISE) 4.1. Important Selection Criteria for VIPV . 16 Bonna Newman (TNO) 4.2 Technological Requirements of the Integration Process . 17 Eduardo Román (TECNALIA) 4.3 To-Dos for R&D . 18 Uwe Rau (JÜLICH) 4.4 Strategic Targets. 19 Rutger Schlatmann (HZB) 5. CONCLUSIONS. 20 Layout and Printing Secretariat of the European Technology and Innovation Platform for Photovoltaics Tel: +49-89-720 12 722 Fax: +49-89-720 12 791 [email protected] Disclaimer The opinions expressed in this document are the sole responsibility of the European Photovoltaic Technology and Innovation Platform and do not necessarily represent the official position of the European Commission. “The project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 825669” 2 3 SCOPE AND MISSION POLITICAL CONTEXT SCOPE AND MISSION 1. POLITICAL CONTEXT The growing awareness of the global need for sustainable mobility empowers the application of new technological innovations to the road transport sector. -

Outdoor Performance of a Thin-Film Gallium-Arsenide Photovoltaic Module
NREL/CP-5200-57902. Presented at the 39th IEEE Photovoltaic Specialists Conference. Outdoor Performance of a Thin-Film Gallium-Arsenide Photovoltaic Module Timothy J Silverman∗, Michael G. Deceglie∗, Bill Marion∗, Sam Cowley†, Brendan Kayes†, Sarah Kurtz∗ ∗National Renewable Energy Laboratory, Golden, Colorado, 80401, United States †Alta Devices, Inc., Sunnyvale, California, 94085, United States Abstract—We deployed a 855 cm2 thin-film, single-junction the defect concentration, but amorphous silicon products have gallium arsenide (GaAs) photovoltaic (PV) module outdoors. usually had efficiencies < 10%. In contrast, it is expected Due to its fundamentally different cell technology compared to that PV technologies that operate near the theoretical limit silicon (Si), the module responds differently to outdoor conditions. On average during the test, the GaAs module produced more for efficiency should have lower operating temperature and power when its temperature was higher. We show that its smaller performance sensitivity to temperature. maximum-power temperature coefficient, while actually negative, In this work, we present for the first time an analysis is several times smaller in magnitude than that of a Si module of the outdoor behavior of a terrestrial, non-concentrator used for comparison. The positive correlation of power with GaAs PV module. Throughout the work, results are illustrated temperature in GaAs is due to temperature-correlated changes in the incident spectrum. We show that a simple correction based by comparison with a monocrystalline Si module. First, we on precipitable water vapor (PWV) brings the photocurrent consider theoretical and measured variation in performance temperature coefficient into agreement with that measured by due to changes in temperature and incident spectrum. -
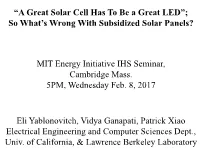
MIT Energy Initiative IHS Seminar, So What's Wrong with Subsidized
“A Great Solar Cell Has To Be a Great LED”; So What’s Wrong With Subsidized Solar Panels? MIT Energy Initiative IHS Seminar, Cambridge Mass. 5PM, Wednesday Feb. 8, 2017 Eli Yablonovitch, Vidya Ganapati, Patrick Xiao Electrical Engineering and Computer Sciences Dept., Univ. of California, & Lawrence Berkeley Laboratory 30 29 Alta Devices record, 28.8% 28 1-sun, single junction, 27 solar cell efficiency record: 26 Efficiency (%) Efficiency 25 24 1990 1995 2000 2005 2010 Year 1.15 Alta Devices record cell, 1.122 volts (Volts) 1.10 OC Open Circuit voltage for 1.05 record efficiency cells: 1.00 Open Circuit voltage V voltage Open Circuit 0.95 1990 1995 2000 2005 2010 Year GaAs solar cells are the preferred technology, where cost is no objection: Space The Epitaxial Liftoff Process: Courtesy of Alta Devices, Inc. Li Hejun h h h 25.1% e- efficiency + 1990-2007 h h h h hg h g 28.8% e- efficiency 2011-2012 h+ excellent reflector >>95% Shockley told us to generate the maximum possible external luminescence: qVoc = qVoc-ideal – kT|ln{ext}| The external luminescence yield Only external ext is what matters! Luminescence can balance the incoming radiation. 1 sun results from Alta Devices, Inc. Expected to reach 29.8% single junction For solar cells at 25%, good electron-hole transport is already a given. Further improvements of efficiency above 25% are all about the photon management! A great solar cell needs be a great LED! Counter-intuitively: Solar cells perform best when there is maximum external fluorescence yield ext. Miller et al, IEEE J. -

Alta Devices, Inc
Final Technical Progress Report: High-Efficiency Low-Cost Thin-Film GaAs Photovoltaic Module Development Program July 14, 2010 — January 13, 2012 Laila Mattos Alta Devices, Inc. Santa Clara, California NREL is a national laboratory of the U.S. Department of Energy, Office of Energy Efficiency & Renewable Energy, operated by the Alliance for Sustainable Energy, LLC. Subcontract Report NREL/SR-5200-54398 March 2012 Contract No. DE-AC36-08GO28308 Final Technical Progress Report: High-Efficiency Low-Cost Thin-Film GaAs Photovoltaic Module Development Program July 14, 2010 — January 13, 2012 Laila Mattos Alta Devices, Inc. Santa Clara, California NREL Technical Monitor: Brian Keyes Prepared under Subcontract No. NAT-0-99013-02 NREL is a national laboratory of the U.S. Department of Energy, Office of Energy Efficiency & Renewable Energy, operated by the Alliance for Sustainable Energy, LLC. National Renewable Energy Laboratory Subcontract Report 1617 Cole Boulevard NREL/SR-5200-54398 Golden, Colorado 80401 March 2012 303-275-3000 • www.nrel.gov Contract No. DE-AC36-08GO28308 This publication received minimal editorial review at NREL. NOTICE This report was prepared as an account of work sponsored by an agency of the United States government. Neither the United States government nor any agency thereof, nor any of their employees, makes any warranty, express or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States government or any agency thereof. -

6 Thin-Film III–V Single Junction and Multijunction Solar Cells and Their
177 6 Thin-Film III–V Single Junction and Multijunction Solar Cells and Their Integration onto Heterogeneous Substrates He Ding1 and Xing Sheng2 1Beijing Institute of Technology, School of Optics and Photonics, 5 South Zhongguancun Street, Beijing, 100081, China 2Tsinghua University, Department of Electronic Engineering and Beijing National Research Center for Information Science and Technology, 30 Shuangqing Street, Beijing, 100084, China 6.1 Introduction Over the last decade, thanks to technology developments and economies of scale, the photovoltaic (PV) industry has been booming with growth rates well in excess of 30% per year and the PV system cost is continuously reduced by approxi- mately 20% each time the cumulative production doubled [1–3]. In spite of the high growth rate and the lower price, the PV industry is still dependent on sub- sidies in the major markets of the world, which is highly affected by govern- ment policies [3]. In order to further develop the PV market and attract more industrial companies, costs should be further reduced and solar cell efficiencies should be enhanced, in order to overcome grid parity [4]. Among all the PV tech- niques, III–V-based solar cells are the most successful technique for achieving the highest PV conversion efficiencies, mainly attributed to their unique char- acteristics such as high crystallinity and strong optical absorption. In particular, multijunction (MJ) III–V-based solar cells make the best use of the broadband solar spectrum by utilizing multiple optically and electrically coupled subcells with different bandgaps, and their performance is steadily improved by absolute ∼1% efficiency increase per year, with the recent record efficiency reaching 46% [1] (https://www.nrel.gov/pv/). -

Study of Photovoltaic Cells Implantation in a Long-Endurance Airplane Drone
Open Archive Toulouse Archive Ouverte (OATAO ) OATAO is an open access repository that collects the wor of some Toulouse researchers and ma es it freely available over the web where possible. This is an author's version published in: https://oatao.univ-toulouse.fr/21707 Official URL : https://doi.org/10.1109/ICRERA.2018.8566931 To cite this version : Martinez, Viviana and Defaÿ, François and Salvetat, Laurent and Neuhaus, Kolja and Bressan, Michaël and Alonso, Corinne and Boitier, Vincent Study of Photovoltaic Cells Implantation in a Long-Endurance Airplane Drone. (2018) In: 2018 7th International Conference on Renewable Energy Research and Applications (ICRERA), 14 October 2018 - 17 October 2018 (Paris, France). Any correspondence concerning this service should be sent to the repository administrator: [email protected] Study of Photovoltaic Cells Implantation in a Long-Endurance Airplane Drone. Viviana Martinez1, F. Defaÿ1, L. Salvetat2, K. Neuhaus3, M. Bressan3 C. Alonso3, V. Boitier3, 1ISAE-SUPAERO, Université de Toulouse, DCAS, Toulouse, France 2Lycée d’Artagnan, Nogaro, France 3 LAAS-CNRS, Université de Toulouse, UPS, Toulouse, France [email protected], [email protected] Abstract: Applications of unmanned aerial vehicle (UAVs) the cells disposition on the wings, and the economic factor are expanding for long-endurance mission such as were also subject of study. Finally, a first version of the solar agricultural inspection, fire prevention and many others. panel was made. Photovoltaic cells can be added to the wing surface and First, a modelization of the contribution of the sun on the PV extend the global endurance of the UAV. -

Hybrid Solar Collector Using Nonimaging Optics and Photovoltaic Components Roland Winston *A, Eli Yablonovitch B, Lun Jiang A, Bennett K
Invited Paper Hybrid Solar Collector Using Nonimaging Optics and Photovoltaic Components Roland Winston *a, Eli Yablonovitch b, Lun Jiang a, Bennett K. Widyolar a, Mahmoud Abdelhamid a, Gregg Scranton b, David Cygan c, Aleksandr Kozlov c , a University of California- Merced, 5200 Lake Rd, Merced, CA USA 95343; b University of California- Berkeley, Berkeley, CA USA; c Gas Technology Institute, Des Plaines, Illinois, USA ABSTRACT The project team of University of California at Merced (UC-M), Gas Technology Institute, and Dr. Eli Yablonovitch of University of California at Berkeley developed a novel hybrid concentrated solar photovoltaic thermal (PV/T) collector using nonimaging optics and world record single-junction Gallium arsenide (GaAs) PV components integrated with particle laden gas as thermal transfer and storage media, to simultaneously generate electricity and high temperature dispatchable heat. The collector transforms a parabolic trough, commonly used in CSP plants, into an integrated spectrum-splitting device. This places a spectrum-sensitive topping element on a secondary reflector that is registered to the thermal collection loop. The secondary reflector transmits higher energy photons for PV topping while diverting the remaining lower energy photons to the thermal media, achieving temperatures of around 400°C even under partial utilization of the solar spectrum. The collector uses the spectral selectivity property of Gallium arsenide (GaAs) cells to maximize the exergy output of the system, resulting in an estimated exergy efficiency of 48%. The thermal media is composed of fine particles of high melting point material in an inert gas that increases heat transfer and effectively stores excess heat in hot particles for later on-demand use.