Overview of Iterative Linear System Solver Packages
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
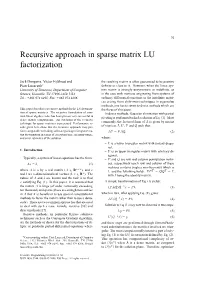
Recursive Approach in Sparse Matrix LU Factorization
51 Recursive approach in sparse matrix LU factorization Jack Dongarra, Victor Eijkhout and the resulting matrix is often guaranteed to be positive Piotr Łuszczek∗ definite or close to it. However, when the linear sys- University of Tennessee, Department of Computer tem matrix is strongly unsymmetric or indefinite, as Science, Knoxville, TN 37996-3450, USA is the case with matrices originating from systems of Tel.: +865 974 8295; Fax: +865 974 8296 ordinary differential equations or the indefinite matri- ces arising from shift-invert techniques in eigenvalue methods, one has to revert to direct methods which are This paper describes a recursive method for the LU factoriza- the focus of this paper. tion of sparse matrices. The recursive formulation of com- In direct methods, Gaussian elimination with partial mon linear algebra codes has been proven very successful in pivoting is performed to find a solution of Eq. (1). Most dense matrix computations. An extension of the recursive commonly, the factored form of A is given by means technique for sparse matrices is presented. Performance re- L U P Q sults given here show that the recursive approach may per- of matrices , , and such that: form comparable to leading software packages for sparse ma- LU = PAQ, (2) trix factorization in terms of execution time, memory usage, and error estimates of the solution. where: – L is a lower triangular matrix with unitary diago- nal, 1. Introduction – U is an upper triangular matrix with arbitrary di- agonal, Typically, a system of linear equations has the form: – P and Q are row and column permutation matri- Ax = b, (1) ces, respectively (each row and column of these matrices contains single a non-zero entry which is A n n A ∈ n×n x where is by real matrix ( R ), and 1, and the following holds: PPT = QQT = I, b n b, x ∈ n and are -dimensional real vectors ( R ). -

Abstract 1 Introduction
Implementation in ScaLAPACK of Divide-and-Conquer Algorithms for Banded and Tridiagonal Linear Systems A. Cleary Department of Computer Science University of Tennessee J. Dongarra Department of Computer Science University of Tennessee Mathematical Sciences Section Oak Ridge National Laboratory Abstract Described hereare the design and implementation of a family of algorithms for a variety of classes of narrow ly banded linear systems. The classes of matrices include symmetric and positive de - nite, nonsymmetric but diagonal ly dominant, and general nonsymmetric; and, al l these types are addressed for both general band and tridiagonal matrices. The family of algorithms captures the general avor of existing divide-and-conquer algorithms for banded matrices in that they have three distinct phases, the rst and last of which arecompletely paral lel, and the second of which is the par- al lel bottleneck. The algorithms have been modi ed so that they have the desirable property that they are the same mathematical ly as existing factorizations Cholesky, Gaussian elimination of suitably reordered matrices. This approach represents a departure in the nonsymmetric case from existing methods, but has the practical bene ts of a smal ler and more easily hand led reduced system. All codes implement a block odd-even reduction for the reduced system that al lows the algorithm to scale far better than existing codes that use variants of sequential solution methods for the reduced system. A cross section of results is displayed that supports the predicted performance results for the algo- rithms. Comparison with existing dense-type methods shows that for areas of the problem parameter space with low bandwidth and/or high number of processors, the family of algorithms described here is superior. -

Accelerating the LOBPCG Method on Gpus Using a Blocked Sparse Matrix Vector Product
Accelerating the LOBPCG method on GPUs using a blocked Sparse Matrix Vector Product Hartwig Anzt and Stanimire Tomov and Jack Dongarra Innovative Computing Lab University of Tennessee Knoxville, USA Email: [email protected], [email protected], [email protected] Abstract— the computing power of today’s supercomputers, often accel- erated by coprocessors like graphics processing units (GPUs), This paper presents a heterogeneous CPU-GPU algorithm design and optimized implementation for an entire sparse iter- becomes challenging. ative eigensolver – the Locally Optimal Block Preconditioned Conjugate Gradient (LOBPCG) – starting from low-level GPU While there exist numerous efforts to adapt iterative lin- data structures and kernels to the higher-level algorithmic choices ear solvers like Krylov subspace methods to coprocessor and overall heterogeneous design. Most notably, the eigensolver technology, sparse eigensolvers have so far remained out- leverages the high-performance of a new GPU kernel developed side the main focus. A possible explanation is that many for the simultaneous multiplication of a sparse matrix and a of those combine sparse and dense linear algebra routines, set of vectors (SpMM). This is a building block that serves which makes porting them to accelerators more difficult. Aside as a backbone for not only block-Krylov, but also for other from the power method, algorithms based on the Krylov methods relying on blocking for acceleration in general. The subspace idea are among the most commonly used general heterogeneous LOBPCG developed here reveals the potential of eigensolvers [1]. When targeting symmetric positive definite this type of eigensolver by highly optimizing all of its components, eigenvalue problems, the recently developed Locally Optimal and can be viewed as a benchmark for other SpMM-dependent applications. -

Comparison of Two Stationary Iterative Methods
Comparison of Two Stationary Iterative Methods Oleksandra Osadcha Faculty of Applied Mathematics Silesian University of Technology Gliwice, Poland Email:[email protected] Abstract—This paper illustrates comparison of two stationary Some convergence result for the block Gauss-Seidel method iteration methods for solving systems of linear equations. The for problems where the feasible set is the Cartesian product of aim of the research is to analyze, which method is faster solve m closed convex sets, under the assumption that the sequence this equations and how many iteration required each method for solving. This paper present some ways to deal with this problem. generated by the method has limit points presented in.[5]. In [9] presented improving the modiefied Gauss-Seidel method Index Terms—comparison, analisys, stationary methods, for Z-matrices. In [11] presented the convergence Gauss-Seidel Jacobi method, Gauss-Seidel method iterative method, because matrix of linear system of equations is positive definite, but it does not afford a conclusion on the convergence of the Jacobi method. However, it also proved I. INTRODUCTION that Jacobi method also converges. Also these methods were present in [12], where described each The term ”iterative method” refers to a wide range of method. techniques that use successive approximations to obtain more This publication present comparison of Jacobi and Gauss- accurate solutions to a linear system at each step. In this publi- Seidel methods. These methods are used for solving systems cation we will cover two types of iterative methods. Stationary of linear equations. We analyze, how many iterations required methods are older, simpler to understand and implement, but each method and which method is faster. -

Jacobi-Davidson, Gauss-Seidel and Successive Over-Relaxation For
Applied Mathematics and Computational Intelligence Volume 6, 2017 [41-52] Jacobi‐Davidson, Gauss‐Seidel and Successive Over‐Relaxation for Solving Systems of Linear Equations Fatini Dalili Mohammed1,a and Mohd Rivaieb 1Department of Computer Sciences and Mathematics, Universiti Teknologi MARA (UiTM) Terengganu, Campus Kuala Terengganu, Malaysia ABSTRACT Linear systems are applied in many applications such as calculating variables, rates, budgets, making a prediction and others. Generally, there are two techniques of solving system of linear equation including direct methods and iterative methods. Some basic solution methods known as direct methods are ineffective in solving many equations in large systems due to slower computation. Due to inability of direct methods, iterative methods are practical to be used in large systems of linear equations as they do not need much storage. In this project, three indirect methods are used to solve large system of linear equations. The methods are Jacobi Davidson, Gauss‐Seidel and Successive Over‐ Relaxation (SOR) which are well known in the field of numerical analysis. The comparative results analysis of the three methods is considered. These three methods are compared based on number of iterations, CPU time and error. The numerical results show that Gauss‐Seidel method and SOR method with ω=1.25 are more efficient than others. This research allows researcher to appreciate the use of iterative techniques for solving systems of linear equations that is widely used in industrial applications. Keywords: system of linear equation, iterative method, Jacobi‐Davidson, Gauss‐Seidel, Successive Over‐Relaxation 1. INTRODUCTION Linear systems are important in our real life. They are applied in various applications such as in calculating variables, rates, budgets, making a prediction and others. -

A Study on Comparison of Jacobi, Gauss-Seidel and Sor Methods For
International Journal of Mathematics Trends and Technology (IJMTT) – Volume 56 Issue 4- April 2018 A Study on Comparison of Jacobi, Gauss- Seidel and Sor Methods for the Solution in System of Linear Equations #1 #2 #3 *4 Dr.S.Karunanithi , N.Gajalakshmi , M.Malarvizhi , M.Saileshwari #Assistant Professor ,* Research Scholar Thiruvalluvar University,Vellore PG & Research Department of Mathematics,Govt.Thirumagal Mills College,Gudiyattam,Vellore Dist,Tamilnadu,India-632602 Abstract — This paper presents three iterative methods for the solution of system of linear equations has been evaluated in this work. The result shows that the Successive Over-Relaxation method is more efficient than the other two iterative methods, number of iterations required to converge to an exact solution. This research will enable analyst to appreciate the use of iterative techniques for understanding the system of linear equations. Keywords — The system of linear equations, Iterative methods, Initial approximation, Jacobi method, Gauss- Seidel method, Successive Over- Relaxation method. 1. INTRODUCTION AND PRELIMINARIES Numerical analysis is the area of mathematics and computer science that creates, analyses, and implements algorithms for solving numerically the problems of continuous mathematics. Such problems originate generally from real-world applications of algebra, geometry and calculus, and they involve variables which vary continuously. These problems occur throughout the natural sciences, social science, engineering, medicine, and business. The solution of system of linear equations can be accomplished by a numerical method which falls in one of two categories: direct or iterative methods. We have so far discussed some direct methods for the solution of system of linear equations and we have seen that these methods yield the solution after an amount of computation that is known advance. -

Chebyshev and Fourier Spectral Methods 2000
Chebyshev and Fourier Spectral Methods Second Edition John P. Boyd University of Michigan Ann Arbor, Michigan 48109-2143 email: [email protected] http://www-personal.engin.umich.edu/jpboyd/ 2000 DOVER Publications, Inc. 31 East 2nd Street Mineola, New York 11501 1 Dedication To Marilyn, Ian, and Emma “A computation is a temptation that should be resisted as long as possible.” — J. P. Boyd, paraphrasing T. S. Eliot i Contents PREFACE x Acknowledgments xiv Errata and Extended-Bibliography xvi 1 Introduction 1 1.1 Series expansions .................................. 1 1.2 First Example .................................... 2 1.3 Comparison with finite element methods .................... 4 1.4 Comparisons with Finite Differences ....................... 6 1.5 Parallel Computers ................................. 9 1.6 Choice of basis functions .............................. 9 1.7 Boundary conditions ................................ 10 1.8 Non-Interpolating and Pseudospectral ...................... 12 1.9 Nonlinearity ..................................... 13 1.10 Time-dependent problems ............................. 15 1.11 FAQ: Frequently Asked Questions ........................ 16 1.12 The Chrysalis .................................... 17 2 Chebyshev & Fourier Series 19 2.1 Introduction ..................................... 19 2.2 Fourier series .................................... 20 2.3 Orders of Convergence ............................... 25 2.4 Convergence Order ................................. 27 2.5 Assumption of Equal Errors ........................... -

Over-Scalapack.Pdf
1 2 The Situation: Parallel scienti c applications are typically Overview of ScaLAPACK written from scratch, or manually adapted from sequen- tial programs Jack Dongarra using simple SPMD mo del in Fortran or C Computer Science Department UniversityofTennessee with explicit message passing primitives and Mathematical Sciences Section Which means Oak Ridge National Lab oratory similar comp onents are co ded over and over again, co des are dicult to develop and maintain http://w ww .ne tl ib. org /ut k/p e opl e/J ackDo ngarra.html debugging particularly unpleasant... dicult to reuse comp onents not really designed for long-term software solution 3 4 What should math software lo ok like? The NetSolve Client Many more p ossibilities than shared memory Virtual Software Library Multiplicityofinterfaces ! Ease of use Possible approaches { Minimum change to status quo Programming interfaces Message passing and ob ject oriented { Reusable templates { requires sophisticated user Cinterface FORTRAN interface { Problem solving environments Integrated systems a la Matlab, Mathematica use with heterogeneous platform Interactiveinterfaces { Computational server, like netlib/xnetlib f2c Non-graphic interfaces Some users want high p erf., access to details {MATLAB interface Others sacri ce sp eed to hide details { UNIX-Shell interface Not enough p enetration of libraries into hardest appli- Graphic interfaces cations on vector machines { TK/TCL interface Need to lo ok at applications and rethink mathematical software { HotJava Browser -

A Geometric Theory for Preconditioned Inverse Iteration. III: a Short and Sharp Convergence Estimate for Generalized Eigenvalue Problems
A geometric theory for preconditioned inverse iteration. III: A short and sharp convergence estimate for generalized eigenvalue problems. Andrew V. Knyazev Department of Mathematics, University of Colorado at Denver, P.O. Box 173364, Campus Box 170, Denver, CO 80217-3364 1 Klaus Neymeyr Mathematisches Institut der Universit¨atT¨ubingen,Auf der Morgenstelle 10, 72076 T¨ubingen,Germany 2 Abstract In two previous papers by Neymeyr: A geometric theory for preconditioned inverse iteration I: Extrema of the Rayleigh quotient, LAA 322: (1-3), 61-85, 2001, and A geometric theory for preconditioned inverse iteration II: Convergence estimates, LAA 322: (1-3), 87-104, 2001, a sharp, but cumbersome, convergence rate estimate was proved for a simple preconditioned eigensolver, which computes the smallest eigenvalue together with the corresponding eigenvector of a symmetric positive def- inite matrix, using a preconditioned gradient minimization of the Rayleigh quotient. In the present paper, we discover and prove a much shorter and more elegant, but still sharp in decisive quantities, convergence rate estimate of the same method that also holds for a generalized symmetric definite eigenvalue problem. The new estimate is simple enough to stimulate a search for a more straightforward proof technique that could be helpful to investigate such practically important method as the locally optimal block preconditioned conjugate gradient eigensolver. We demon- strate practical effectiveness of the latter for a model problem, where it compares favorably with two -

16 Preconditioning
16 Preconditioning The general idea underlying any preconditioning procedure for iterative solvers is to modify the (ill-conditioned) system Ax = b in such a way that we obtain an equivalent system Aˆxˆ = bˆ for which the iterative method converges faster. A standard approach is to use a nonsingular matrix M, and rewrite the system as M −1Ax = M −1b. The preconditioner M needs to be chosen such that the matrix Aˆ = M −1A is better conditioned for the conjugate gradient method, or has better clustered eigenvalues for the GMRES method. 16.1 Preconditioned Conjugate Gradients We mentioned earlier that the number of iterations required for the conjugate gradient algorithm to converge is proportional to pκ(A). Thus, for poorly conditioned matrices, convergence will be very slow. Thus, clearly we will want to choose M such that κ(Aˆ) < κ(A). This should result in faster convergence. How do we find Aˆ, xˆ, and bˆ? In order to ensure symmetry and positive definiteness of Aˆ we let M −1 = LLT (44) with a nonsingular m × m matrix L. Then we can rewrite Ax = b ⇐⇒ M −1Ax = M −1b ⇐⇒ LT Ax = LT b ⇐⇒ LT AL L−1x = LT b . | {z } | {z } |{z} =Aˆ =xˆ =bˆ The symmetric positive definite matrix M is called splitting matrix or preconditioner, and it can easily be verified that Aˆ is symmetric positive definite, also. One could now formally write down the standard CG algorithm with the new “hat- ted” quantities. However, the algorithm is more efficient if the preconditioning is incorporated directly into the iteration. To see what this means we need to examine every single line in the CG algorithm. -

Iterative Solution Methods and Their Rate of Convergence
Uppsala University Graduate School in Mathematics and Computing Institute for Information Technology Numerical Linear Algebra FMB and MN1 Fall 2007 Mandatory Assignment 3a: Iterative solution methods and their rate of convergence Exercise 1 (Implementation tasks) Implement in Matlab the following iterative schemes: M1: the (pointwise) Jacobi method; M2: the second order Chebyshev iteration, described in Appendix A; M3: the unpreconditioned conjugate gradient (CG) method (see the lecture notes); M4: the Jacobi (diagonally) preconditioned CG method (see the lecture notes). For methods M3 and M4, you have to write your own Matlab code. For the numerical exper- iments you should use your implementation and not the available Matlab function pcg. The latter can be used to check the correctness of your implementation. Exercise 2 (Generation of test data) Generate four test matrices which have different properties: A: A=matgen disco(s,1); B: B=matgen disco(s,0.001); C: C=matgen anisot(s,1,1); D: D=matgen anisot(s,1,0.001); Here s determines the size of the problem, namely, the matrix size is n = 2s. Check the sparsity of the above matrices (spy). Compute the complete spectra of A, B, C, D (say, for s = 3) by using the Matlab function eig. Plot those and compare. Compute the condition numbers of these matrices. You are advised to repeat the experiment for a larger s to see how the condition number grows with the matrix size n. Exercise 3 (Numerical experiments and method comparisons) Test the four meth- ods M1, M2, M3, M4 on the matrices A, B, C, D. -
Solving Linear Systems: Iterative Methods and Sparse Systems
Solving Linear Systems: Iterative Methods and Sparse Systems COS 323 Last time • Linear system: Ax = b • Singular and ill-conditioned systems • Gaussian Elimination: A general purpose method – Naïve Gauss (no pivoting) – Gauss with partial and full pivoting – Asymptotic analysis: O(n3) • Triangular systems and LU decomposition • Special matrices and algorithms: – Symmetric positive definite: Cholesky decomposition – Tridiagonal matrices • Singularity detection and condition numbers Today: Methods for large and sparse systems • Rank-one updating with Sherman-Morrison • Iterative refinement • Fixed-point and stationary methods – Introduction – Iterative refinement as a stationary method – Gauss-Seidel and Jacobi methods – Successive over-relaxation (SOR) • Solving a system as an optimization problem • Representing sparse systems Problems with large systems • Gaussian elimination, LU decomposition (factoring step) take O(n3) • Expensive for big systems! • Can get by more easily with special matrices – Cholesky decomposition: for symmetric positive definite A; still O(n3) but halves storage and operations – Band-diagonal: O(n) storage and operations • What if A is big? (And not diagonal?) Special Example: Cyclic Tridiagonal • Interesting extension: cyclic tridiagonal • Could derive yet another special case algorithm, but there’s a better way Updating Inverse • Suppose we have some fast way of finding A-1 for some matrix A • Now A changes in a special way: A* = A + uvT for some n×1 vectors u and v • Goal: find a fast way of computing (A*)-1