Improving a Virtual Race Car Performance Using MSC.ADAMS/Car-Motorsports and Modefrontier
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Triple Champion René Rast: “The DTM Has Always Been My Home”
Audi MediaInfo Triple champion René Rast: “The DTM has always been my home” • The big champion’s interview with the Audi factory driver • From the Audi RS 5 DTM to the Audi e-tron FE07 • Double program possible in Formula E and DTM Neuburg a. d. Donau, November 18, 2020 – The future is electric, also for René Rast. The most successful Audi DTM driver of all time will take part in the FIA Formula E World Championship for Audi in 2021, but the 34-year-old father of a family has also already set his next goal in the DTM. With his third title triumph in just four years, René Rast wrote DTM history at the beginning of November. The Minden-born driver, who lives in Bregenz (Austria), won 24 races in record time with the Audi RS 5 DTM, took 20 pole positions, set the fastest lap 14 times and collected 1,113 points. With 77 starts, this corresponds to an average of more than 14 points per race. In the DTM’s eternal list of best drivers, René Rast is now tied with racing legend Klaus Ludwig in second place for championship titles. In this interview, the German explains how he spent the days after winning his third title, which goals he has for Formula E, why he remains loyal to Audi and which DTM record he still wants to break. How does this sound: three-time DTM champion and on a par with a legend like Klaus Ludwig? Of course, it is a very special feeling to be among the three best DTM drivers in history. -

Customer Teams Field Five Audi R8 LMS Cars at the DTM Season Opener at Monza
Audi MediaInfo Customer teams field five Audi R8 LMS cars at the DTM season opener at Monza • Customer teams ABT Sportsline and Rosberg field five GT3 sports cars • Sophia Flörsch contests first DTM race Neuburg a. d. Donau, June 16, 2021 – The DTM starts its 36th season under new auspices in which Audi is strongly represented on two grids. While the DTM is relying on GT3 sportscars like the Audi R8 LMS for the first time after two decades of Class 1 touring cars, the DTM Trophy is tackling its second season with production-based models like the Audi R8 LMS GT4. “Audi knows the DTM very well and, with twelve title successes in the drivers classification alone, is one of the two most successful brands in history. A new era begins for the DTM in 2021. Gerhard Berger has succeeded in transforming the Class 1 era into a highly attractive platform based on GT motorsport. The 2021 season promises pure excitement thanks to a high level of brand diversity and an internationally top-class driver line-up,” says Julius Seebach, Managing Director Audi Sport GmbH and responsible for motorsport at Audi. “For our Audi Sport customer racing customers, the new DTM platform offers the opportunity to fight for the coveted DTM title. With the R8 LMS, we offer the product that is capable of winning and are pleased that the teams have chosen Audi.” As usual, two races are scheduled for each of the eight events. They usually last 55 minutes plus one lap and include one mandatory pit stop each. -

MOTORSPORTS a North Carolina Growth Industry Under Threat
MOTORSPORTS A North Carolina Growth Industry Under Threat A REPORT PREPARED FOR NORTH CAROLINA MOTORSPORTS ASSOCIATION BY IN COOPERATION WITH FUNDED BY: RURAL ECONOMIC DEVELOPMENT CENTER, THE GOLDEN LEAF FOUNDATION AND NORTH CAROLINA MOTORSPORTS FOUNDATION October 2004 Motorsports – A North Carolina Growth Industry Under Threat TABLE OF CONTENTS Preliminary Remarks 6 Introduction 7 Methodology 8 Impact of Industry 9 History of Motorsports in North Carolina 10 Best Practices / Competitive Threats 14 Overview of Best Practices 15 Virginia Motorsports Initiative 16 South Carolina Initiative 18 Findings 20 Overview of Findings 21 Motorsports Cluster 23 NASCAR Realignment and Its Consequences 25 Events 25 Teams 27 Drivers 31 NASCAR Venues 31 NASCAR All-Star Race 32 Suppliers 32 Technology and Educational Institutions 35 A Strong Foothold in Motorsports Technology 35 Needed Enhancements in Technology Resources 37 North Carolina Motorsports Testing and Research Complex 38 The Sanford Holshouser Business Development Group and UNC Charlotte Urban Institute 2 Motorsports – A North Carolina Growth Industry Under Threat Next Steps on Motorsports Task Force 40 Venues 41 Sanctioning Bodies/Events 43 Drag Racing 44 Museums 46 Television, Film and Radio Production 49 Marketing and Public Relations Firms 51 Philanthropic Activities 53 Local Travel and Tourism Professionals 55 Local Business Recruitment Professionals 57 Input From State Economic Development Officials 61 Recommendations - State Policies and Programs 63 Governor/Commerce Secretary 65 North -

2009 Deutsche Tourenwagen Masters
2009 Deutsche Tourenwagen Masters The 2009 Deutsche Tourenwagen Masters was the twenty-third season of premier German 2009 Deutsche Tourenwagen touring car championship and also tenth season under the moniker of Deutsche Tourenwagen Masters Masters since the series' resumption in 2000. The series began on 17 May at Hockenheim and Previous: 2008 Next: 2010 finished on 25 October at the same venue. Support series: Formula 3 Euro Series Timo Scheider successfully defended his championship title, taking his Audi A4 to a five-point Timo Scheider defend his second Deutsche Tourenwagen Masters Drivers' Championship while Gary Paffett (right) finished second in the championship. series win over Mercedes-Benz driver Gary Paffett. Contents Teams and drivers Driver changes Technical changes Race calendar and results Season results Championship standings Teams' championship References External links Teams and drivers Of the nineteen drivers that competed in the 2008 season, only Bernd Schneider and Christijan Albers did not return. Rookies in 2009 are the Kolles Futurecom trio of Christian Bakkerud, Johannes Seidlitz and Tomáš Kostka. The following manufacturers, teams and drivers competed in the 2009 Deutsche Tourenwagen Masters. All teams competed with tyres supplied by Dunlop. Make Car Team No. Drivers Rounds 1 Timo Scheider[1] All 2 Tom Kristensen[1] All Audi A4 DTM 2009 Abt Sportsline 5 Mattias Ekström[1] All 6 Martin Tomczyk[1] All 21 Katherine Legge[1] All 11 Mike Rockenfeller[1] All Audi Team Rosberg Audi A4 DTM 2008 12 Markus Winkelhock[1] -

STARTERLISTE 2005 FORMULA 3 EURO SERIES Nr
STARTERLISTE 2005 FORMULA 3 EURO SERIES Nr. Nation Fahrer Bewerber Fahrzeug Team Motor 1 GBR Lewis Hamilton ASM F3 Dallara F305/021 ASM F3 Mercedes 2 GER Adrian Sutil ASM F3 Dallara F305/059 ASM F3 Mercedes 2 GER Maximilian Götz ASM F3 Dallara F305/059 ASM F3 Mercedes 3 FRA Loïc Duval Signature-Plus Dallara F305/036 Signature Opel 4 GBR James Rossiter Signature-Plus Dallara F305/029 Signature Opel 5 JPN Kohei Hirate Team Rosberg Dallara F305/003 Team Rosberg Opel 6 NED Giedo van der Garde Team Rosberg Dallara F305/039 Team Rosberg Opel 7 BRA Lucas di Grassi Manor Motorsport Dallara F305/025 Manor Motorsport Mercedes 7 BRA Lucas di Grassi Manor Motorsport Dallara F305/062 Manor Motorsport Mercedes 8 GBR Paul di Resta Manor Motorsport Dallara F305/020 Manor Motorsport Mercedes 9 GER Sebastian Vettel ASL Mücke Motorsport Dallara F305/011 Mücke Motorsport Mercedes 10 BRA Átila Abreu ASL Mücke Motorsport Dallara F305/028 Mücke Motorsport Mercedes 11 BEL Greg Franchi Prema Powerteam Dallara F305/004 Prema Powerteam Opel 12 ITA Marco Bonanomi Prema Powerteam Dallara F305/026 Prema Powerteam Opel 14 BRA Fábio Carbone Signature SLC R1/001 Signature Opel 15 FRA Guillaume Moreau Signature Dallara F305/035 Signature Opel 16 ESP Alejandro Núñez HBR Motorsport Dallara F305/027 HBR Motorsport Opel 17 GER Maximilian Götz HBR Motorsport Dallara F305/040 HBR Motorsport Opel 17 GBR Danny Watts HBR Motorsport Dallara F305/040 HBR Motorsport Opel 18 ARG Esteban Guerrieri Team Midland Euroseries Dallara F305/034 Team Midland Euroseries Toyota 19 USA Richard -

DTM Hockenheimring Hockenheimring BW, Length 4574 M 06
DTM Hockenheimring Hockenheimring BW, length 4574 m 06. - 08.11.2020 DTM Result race 1, 07.11.2020 A M E N D E D -Reg.No.: R-12025-A/20 Rk No DRIVER/ENTRANT CAR LAPS TIME GAP INT km/h BEST IN 1 51 Nico Müller (CHE) Audi Sport Team Abt SportslineCastrol EDGE Audi RS 5 DTM 36 1:01:11.045 161.477 1:31.039 19 2 33 René Rast (DEU) 0.622 Audi Sport Team RosbergAudi Sport RS 5 DTM 36 1:01:11.667 0.622 161.450 1:30.487 22 3 53 Jamie Green (GBR) 0.411 Audi Sport Team RosbergAkrapovic Audi RS 5 DTM 36 1:01:12.078 1.033 161.432 1:31.472 21 4 28 Loic Duval (FRA) 3.927 Audi Sport Team PhoenixBMC Air Filter Audi RS 5 DTM 36 1:01:16.005 4.960 161.259 1:31.231 22 5 27 Jonathan Aberdein (RSA) 1.620 BMW Team RMRCATL BMW M4 DTM 36 1:01:17.625 6.580 161.188 1:31.861 20 6 99 Mike Rockenfeller (DEU) 0.031 Audi Sport Team PhoenixTwin Busch Audi RS5 DTM 36 1:01:17.656 6.611 161.187 1:31.428 12 7 4 Robin Frijns (NLD) 0.116 Audi Sport Team Abt SportslineAral Ultimate Audi RS 5 DTM 36 1:01:17.772 6.727 161.182 1:30.907 11 8 8 Robert Kubica (POL) 1.941 ORLEN Team ART (ART Grand Prix) BMW M4 CLASS1 36 1:01:19.713 8.668 161.097 1:32.030 22 9 25 Philipp Eng (AUT) 0.357 BMW Team RBMZF BMW M4 DTM 36 1:01:20.070 9.025 161.081 1:32.212 21 10 31 Sheldon Van der Linde (RSA) 2.031 BMW Team RBMShell BMW M4 DTM 36 1:01:22.101 11.056 160.992 1:31.480 18 11 62 Ferdinand Habsburg (AUT) 1.590 WRT Team Audi SportWRT Audi RS 5 DTM 36 1:01:23.691 12.646 160.923 1:31.653 23 12 22 Lucas Auer (AUT) 2.598 BMW Team RMRBMW Bank M4 DTM 36 1:01:26.289 15.244 160.810 1:32.934 20 13 13 Fabio -

Investment for Growth Machining Centres & Probing
CNC Machining Spring00 4/24/00 11:07 AM Page 1 volume 4 number 13 spring 2000 TheThe NewNew NationwideNationwide HFOHFO NetworkNetwork HMCsHMCs CrankCrank UpUp ProductionProduction MixingMixing MethodsMethods andand MachinesMachines forfor FlexibilityFlexibility TrainingTraining forfor thethe FutureFuture InvestmentInvestment forfor GrowthGrowth JobJob ShopShop TakesTakes OffOff CuttingCutting TitaniumTitanium CNC Machining Spring00 4/24/00 11:07 AM Page 2 photo by Mike Reyno © Skytech Images > volume 4 > number 13 > spring 2000 > CONTENTS FEATURES hat goes around, comes around. No, wait, that’s not it. What Kellogg Cranks Up Production 6 comes around, goes around? Nope, that’s not it either. How about: What goes around and around? Yeah, that’s it. Horizontals in the Mix at Hobart 10 W Now that you’re totally confused, I’ll explain. The above is just a Titanium Hog Breeds Success 14 roundabout way to convey that this issue of CNC Machining is filled with DeLong and Short of a Family Business 26 things that go around. From helicopters, to crankshafts, to mixers, the stories revolve around things that rotate. Haas & Renishaw Fuel Growth 32 Our cover story this time around features MB Manufacturing and Tooling Corporation, a relatively young job shop that cut its teeth hogging out titanium INDUSTRYNEWS blocks for helicopter rotor components. After reaching a turning point in his life, owner Mike Bramlage decided to quit the rat race and set off on his own. With little Editorial: The Changing Face of Distribution 2 more than two years under its belt, his shop has turned the corner and become a very Haas Factory Outlets Dominate Market 3 profitable venture. -
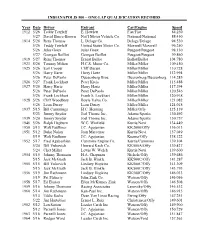
One Lap Record
INDIANAPOLIS 500 – ONE-LAP QUALIFICATION RECORDS Year Date Driver Entrant Car/Engine Speed 1912 5/26 Teddy Tetzlaff E. Hewlett Fiat/Fiat 84.250 5/27 David Bruce-Brown Nat’l Motor Vehicle Co. National/National 88.450 1914 5/26 Rene Thomas L. Delage Co. Delage/Delage 94.530 5/26 Teddy Tetzlaff United States Motor Co. Maxwell/Maxwell 96.250 5/26 Jules Goux Jules Goux Peugeot/Peugeot 98.130 5/27 Georges Boillot Georges Boillot Peugeot/Peugeot 99.860 1919 5/27 Rene Thomas Ernest Ballot Ballot/Ballot 104.780 1923 5/26 Tommy Milton H.C.S. Motor Co. Miller/Miller 109.450 1925 5/26 Earl Cooper Cliff Durant Miller/Miller 110.728 5/26 Harry Hartz Harry Hartz Miller/Miller 112.994 5/26 Peter DePaolo Duesenberg Bros. Duesenberg/Duesenberg 114.285 1926 5/27 Frank Lockhart Peter Kreis Miller/Miller 115.488 1927 5/26 Harry Hartz Harry Hartz Miller/Miller 117.294 5/26 Peter DePaolo Peter DePaolo Miller/Miller 120.546 5/26 Frank Lockhart Frank S. Lockhart Miller/Miller 120.918 1928 5/26 Cliff Woodbury Boyle Valve Co. Miller/Miller 121.082 5/26 Leon Duray Leon Duray Miller/Miller 124.018 1937 5/15 Bill Cummings H.C. Henning Miller/Offy 125.139 5/23 Jimmy Snyder Joel Thorne Inc. Adams/Sparks 130.492 1939 5/20 Jimmy Snyder Joel Thorne Inc. Adams/Sparks 130.757 1946 5/26 Ralph Hepburn W.C. Winfield Kurtis/Novi 134.449 1950 5/13 Walt Faulkner J.C. Agajanian KK2000/Offy 136.013 1951 5/12 Duke Nalon Jean Marcenac Kurtis/Novi 137.049 5/19 Walt Faulkner J.C. -
Fernandez Media Guide 06
Team Information At-A-Glance MEDIA CONTACT: DREW BROWN Team Lowe’s Racing 1435 W. Morehead St, Ste 190 Charlotte, NC 28208 Tel: 704.714.4305 Cell: 704.650.0428 Email: [email protected] TAMY VALKOSKY Fernández Racing 17 El Prisma Rancho Santa Margarita, CA 92688 Tel: 949.459.9172 Cell: 949.842.3946 Email: [email protected] MEDIA RESOURCES: Additional information on Lowe’s Fernández Racing and the Rolex Series can be found at: media.lowesracing.com www.fernandezracing.net www.grandamerican.com GRAND AMERICAN ROAD RACING ASSOCIATION Adam Saal, Director of Communications Tel: 386.947.6681 Email: [email protected] MEDIA REFERENCE: OFFICIAL TEAM NAME: Lowe’s Fernández Racing FOUNDED: December 2005 OWNERS: Fernández Racing (Adrián Fernández, Tom Anderson) HEADQUARTERS: 6835 Guion Road Indianapolis IN 46268 317.299.5100 317.280.3051 Fax DRIVERS: Adrián Fernández and Mario Haberfeld ENTRY: No. 12 Lowe’s Fernández Racing Pontiac Riley KEY PERSONNEL: Tom Anderson, Managing Director Steve Miller, Team Manager Mike Sales, Chief Mechanic John Ward, Race Engineer Lowe’s Fernández Racing to Compete for 2006 Rolex Series Championship LOWE’S AND FERNÁNDEZ RACING ANNOUNCED the creation of of Key Biscayne, Fla., is a former British Formula 3 champion, who made Lowe’s Fernández Racing on January 4 of this year. The team will field the his US racing debut in the Champ Car World Series contesting the 2003 No. 12 Lowe’s Fernandez Racing Pontiac Riley Daytona Prototype for and 2004 seasons. drivers Adrián Fernández and Mario Haberfeld in the 14-race Grand “This is an honor for me to join Adrián Fernández, who I have admired American Rolex Sports Car Series. -

DIA Group Faces Audit
PULLOUT SECTION INSIDE: TV LISTINGS FOR THE WEEK JUNE 29-JULY 5, 1997 THE DETROITEtW VOL. 2 NO. 33 75 CENTS S unday To u r n a l CONTINUING THE STRUGGLE FOR JUSTICE AND CONTRACTS ©TDSJ SPECIAL SECTION INSIDE DIA group A c t io n! M o to w n M e m o r ie s faces audit City official questions Founders So By Paige St. John But in the 1970s, when a Journal Staff Writer financial crisis nearly crippled Detroit’s chief financial watch the DIA, the society began tak dog has ordered a special audit ing a more aggressive role in its of the nonprofit group that is tryoperations. Currently it raises ing to gain control of the Detroitthe lion’s share of the DIA’s Institute of Arts. annual $34-million budget, is The audit comes in the midst responsible for all fund-raising, of a controversial push by Mayoroversees millions of dollars in Dennis Archer to remove the cityendowments and runs such aux from daily operation of the pubiliary departments as its gift lic museum. shop and its photography Auditor general Joseph Harris department. said last week he is struck by the The city, meanwhile, has final absence of independent informasay over the budget and policy tion on the Founders Society’sdecisions. About half of the claim that the DIA cannot surmuseum’s employees, including vive unless the Society is given thea director, curators, guards 20-year contract to run theand janitors, work for the city. museum as it sees fit. -

TRACKSIDE 2016 Welcome to the Firestone 600, the Ninth Round of the 2016 Verizon Indycar Series Season
VERIZON INDYCAR SERIES TRACKSIDE 2016 Welcome to the Firestone 600, the ninth round of the 2016 Verizon IndyCar Series season. The INDYCAR and Texas Motor Speedway communications staffs are here to assist. Direct questions and requests to a member of either staff in the media center. INDYCAR Communications Contacts Mike Kitchel, Director, Communications P: (317) 492-6453 C: (317) 716-5256 [email protected] Pat Caporali, Senior Manager, Media Relations P: (317) 492-4547 C: (317) 447-5789 [email protected] • Kate Guerra, Senior Manager, Advance Communications P: (317) 492-8577 C: (317) 800-8438 [email protected] Mark Robinson, Senior Manager, Editorial P: (317) 492-8538 C: (317) 308-1464 [email protected] Cathy Kightlinger, Manager, Lifestyle Communications P: (317) 492-8534 C: (317) 797-3490 [email protected] Arni Sribhen, Coordinator, Media Relations P: (317) 492-8531 C: (317) 506-4816 [email protected] Texas Motor Speedway Media Relations Contacts: Mike Zizzo, Vice President, Media Relations P: (817) 215-8520 C: (817) 528-4676 [email protected] Gregg Elkin, Manager, Media Relations P: (817) 215-8523; C: 817 937-9206, [email protected] Louis Mora, Manager, Media Relations P: (817) 215-8521; C: (817) 528-3769, [email protected] INDYCAR Media Website – media.indycar.com A media-only section of INDYCAR’s website is available at media.indycar.com. The site contains content about the Verizon IndyCar Series, including: INDYCAR, Verizon IndyCar Series and Mazda Road to Indy logos -

Mercado De 800 Millones De Consumidores En El Asesinato Del Ex Canciller Letelier È Economía /Finanzas È Internacional
México Firmó TLC con la Unión Europea; Revelan Documento que Implica a Pinochet Mercado de 800 Millones de Consumidores en el Asesinato del ex Canciller Letelier è Economía /Finanzas è Internacional Año 48, Número 15,333 Colima, Col., Viernes 24 de Marzo del 2000 www.diariodecolima.com $4.00 Un Hampón Muere También en el Tiroteo; Policíal de VA Impide Plagio; un Agente Muerto GuillermoIban Brun a Ramos,Secuestrar Carlos Salazar Preciado,a Cinco Guillermo Empresarios Saucedo del la Torre, Rafael Pineda Mendoza y Manuel Sánchez de la Madrid,l escaparon al atentado Una patrulla de Villa de Alvarez interceptó a los delincuentes l En la balacera muere el policía preventivo Juliánl Paz Rocha; herido Germán Vega Velasco El plagiario muerto quedó en un canal de riego Ell resto huyó; hasta anoche permanecían cercados por la policía en un predio de El Espinal Se espera capturarlos hoy Sergio URIBE ALVARADO Un enfrentamiento a balazos entre policías y se- de cada bando, así como otro policía herido. Los hechos cuestradores que pretendían plagiar a cinco empresarios ocurrieron ayer como a las 18:30 horas, en la vecina ciudad locales la tarde de ayer, dejó como saldo dos muertos, uno conurbada de Villa de Alvarez. Según los datos proporcionados anoche por el pro- curador de justicia del estado, Jesús Antonio Sam López, alrededor de la hora citada, en la carretera a Villa de Alvarez- Minatitlán, cerca de la empacadora de pepino de la empresa Brun Foods, varios individuos intentaron secuestrar a los señores Manuel Sánchez de la Madrid, Carlos Salazar Preciado, Guillermo Saucedo de la Torre, Rafael Pineda Mendoza y Guillermo Brun Ramos, quienes se dirigían a Esta camioneta policiaca de Villa de Alvarez.