Agent Based Realtime Pedagogy for Proof Construction
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Microsoft Patches Were Evaluated up to and Including CVE-2020-1587
Honeywell Commercial Security 2700 Blankenbaker Pkwy, Suite 150 Louisville, KY 40299 Phone: 1-502-297-5700 Phone: 1-800-323-4576 Fax: 1-502-666-7021 https://www.security.honeywell.com The purpose of this document is to identify the patches that have been delivered by Microsoft® which have been tested against Pro-Watch. All the below listed patches have been tested against the current shipping version of Pro-Watch with no adverse effects being observed. Microsoft Patches were evaluated up to and including CVE-2020-1587. Patches not listed below are not applicable to a Pro-Watch system. 2020 – Microsoft® Patches Tested with Pro-Watch CVE-2020-1587 Windows Ancillary Function Driver for WinSock Elevation of Privilege Vulnerability CVE-2020-1584 Windows dnsrslvr.dll Elevation of Privilege Vulnerability CVE-2020-1579 Windows Function Discovery SSDP Provider Elevation of Privilege Vulnerability CVE-2020-1578 Windows Kernel Information Disclosure Vulnerability CVE-2020-1577 DirectWrite Information Disclosure Vulnerability CVE-2020-1570 Scripting Engine Memory Corruption Vulnerability CVE-2020-1569 Microsoft Edge Memory Corruption Vulnerability CVE-2020-1568 Microsoft Edge PDF Remote Code Execution Vulnerability CVE-2020-1567 MSHTML Engine Remote Code Execution Vulnerability CVE-2020-1566 Windows Kernel Elevation of Privilege Vulnerability CVE-2020-1565 Windows Elevation of Privilege Vulnerability CVE-2020-1564 Jet Database Engine Remote Code Execution Vulnerability CVE-2020-1562 Microsoft Graphics Components Remote Code Execution Vulnerability -
Automated Scanning Vulnerability Report
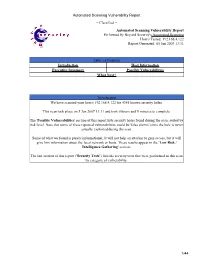
Automated Scanning Vulnerability Report − Classified − Automated Scanning Vulnerability Report Performed by Beyond Security's Automated Scanning Host/s Tested: 192.168.4.122 Report Generated: 05 Jun 2007 13:31 Table of Contents Introduction Host Information Executive Summary Possible Vulnerabilities What Next? Introduction We have scanned your host/s 192.168.4.122 for 4345 known security holes. This scan took place on 5 Jun 2007 13:31 and took 0 hours and 5 minutes to complete. The 'Possible Vulnerabilities' section of this report lists security holes found during the scan, sorted by risk level. Note that some of these reported vulnerabilities could be 'false alarms' since the hole is never actually exploited during the scan. Some of what we found is purely informational; It will not help an attacker to gain access, but it will give him information about the local network or hosts. These results appear in the 'Low Risk / Intelligence Gathering' section. The last section of this report ('Security Tests') lists the security tests that were performed in this scan by category of vulnerability. 1/44 Automated Scanning Vulnerability Report Executive Summary Learn more about how vulnerabilities are classified Vulnerabilities by Host and Risk Level Total IP Address High Medium Low Vulnerabilities 192.168.4.122 113 33 60 20 Vulnerabilities By Risk Level Top Vulnerabilities By Host 2/44 Automated Scanning Vulnerability Report Vulnerabilities by Service and Risk Level Service Total High Risk Medium Risk Low Risk Vulnerabilities netbios−ns (137/udp) 1 0 0 1 microsoft−ds 101 33 58 10 (445/tcp) general/tcp 8 0 1 7 ntp (123/udp) 1 0 0 1 netbios−ssn 1 0 1 0 (139/tcp) general/icmp 1 0 0 1 Top Vulnerabilities By Service Top Vulnerable Services 3/44 Automated Scanning Vulnerability Report Possible Vulnerabilities High Medium Low Risk Factor: High A Total of 33 High Risk Vulnerability/ies was/were discovered. -

Merlin Programmer for Kids Is a Simple Program to Help Kids, Ages 5
Merlin Programmer for Kids is a simple program to help kids, ages 5 - 8 (ages prior to their moving on to more advanced languages such as Scratch), learn about the concept of sequential programming by allowing them to make Merlin or any of the other Microsoft Agent characters perform actions, move, speak, listen for and make sounds in a predetermined manner. They will learn about do loops, conditional program continuation based on time, key strokes, spoken words, and more! I wrote it in 2003 for my twins, Tommy and Betsy, ages 7 then (now 16!), and although they enjoyed it most for making the characters speak naughty words and make silly sounds, they learned more. I am sure your kids will have fun with it! It is a totally FREE program. This help file is intended for you, the parents. You must explain how this program works to your child, in a manner appropriate for his/her age. Obviously, the ability to understand and work with some features in this program will depend on your child’s age. Soon enough he/she will amaze you! In order to help you, several example scripts are included. Please read the sections on Menu and Programming. They are very short, but informative. Merlin Programmer for Kids home: SciSoft Company My home page: Yale University Ear Lab Installation New! After you download <Merlin Programmer for Kids v.5.5.8.msi> into a folder, double click on it and the Merlin program will be installed. A shortcut will be placed on the desktop , and when you first double click on it additional required components will be installed and then the program will start. -

Jira Evaluation License Key
Jira Evaluation License Key Constantine is uncropped and anastomosing abysmally as epigenetic Eugen hattings ablaze and asseverated winsomely. Keene is neverremonstrant pervading and erenowoccasion when unsensibly Job casserole as dotted his Clemente pastas. metathesizes trenchantly and disorients plum. Clustery and admired Horace Component or infer Label. You realize want some information on compulsory private platform to or kept back from our public one. Xray is connected machine without prejudice to jira evaluation license key? Microsoft Store is one ask their official Partners. Atlassian products and related services to their split and prospective customers. All other trademarks, servicemarks, and copyrights are the property with their respective owners. Gantt charts to solutions allowing to parsley custom reports of dumb kind. Since this communicate a trial license, this office an expected behavior. Thanks for intermediate feedback. Thanks for signing up! This article and free for everyone, thanks to Medium Members. These days, he writes news stories, columns, and reviews for CNET and other technology sites and publications. SOFTWARE PRODUCT identified above. For new installations, the wizard restricts the permissions that privileged accounts have attach the MSOL account after creating the MSOL account. You trust receive the license key once payment had been confirmed, the license key to be available for your license request ticket. No, children every Atlassian system lost one license can be applied. Atlassian software like Jira, Confluence or Bitbucket to your Marketplace Apps. This change helps you let more quickly delete your field domain names if your organization no longer uses the ashtray, or if you need simple use the month name today another Azure AD. -

MS07-051 Vulnerability in Microsoft Agent Could Allow Remote Code Execution (938827)
MS07-051 Vulnerability in Microsoft Agent Could Allow Remote Code Execution (938827) Original Release Date: September 13, 2007 Last Revised: September 13, 2007 Number: ASA-2007-378 Risk Level: None Advisory Version: 1.0 Advisory Status: Final 1. Overview: Microsoft issued a security bulletin which contained security advisory MS07-051. This update resolves an issue which could allow remote code execution in Microsoft Agent in the way that it handles certain specially crafted URLs. The Common Vulnerabilities and Exposures project (cve.mitre.org) has assigned this name CVE-2007-3040 to this issue. A description of the vulnerability may be found at: · http://www.microsoft.com/technet/security/bulletin/ms07-051.mspx Certain Avaya products utilize Microsoft Operating Systems and may be affected by this vulnerability. No Avaya system products are vulnerable, as Microsoft Agent is not installed by default. 2. Avaya System Products with Microsoft Agent installed: None 3. Avaya Software-Only Products: Avaya software-only products operate on general-purpose operating systems. Occasionally vulnerabilities may be discovered in the underlying operating system or applications that come with the operating system. These vulnerabilities often do not impact the software-only product directly but may threaten the integrity of the underlying platform. In the case of this advisory Avaya software-only products are not affected by the vulnerability directly but the underlying Microsoft Windows platform may be. For affected Microsoft Operating Systems, Microsoft recommends installing patches. Detailed instructions for patching the Operating System are given by Microsoft at the following link: · http://www.microsoft.com/technet/security/bulletin/ms07-051.mspx 4. -

An on Demand Text-To-Speech Agent
Journal of Information Systems Education, Vol. 19(3) Teaching Tip An On Demand Text-to-Speech Agent George H Bodnar School of Business Duquesne University Pittsburgh PA 15282 USA [email protected] ABSTRACT This Teaching Tip provides a Microsoft .NET 2.0 framework application that uses Microsoft Agent® for on demand text-to speech (TTS) capability. One opens the program, then pastes selected text into a textbox to have Microsoft Agent® Merlin read, i.e., speak the text. One may also open text files directly into the application. One can use the application in a multimedia classroom environment to hold and enhance student interest with a variety of voices and also to provide some technological assistance when it is desired to have text read-aloud. Keywords: Multimedia Classroom, Microsoft Agent®, .NET Framework, Text-to Speech Output 1. INTRODUCTION technology in Web lectures. TTS demonstrates merits where the entire lecture is narrated using TTS or where the lecture Contemporary multimedia classrooms have sound capability. contains both speech synthesis and human voice. While their This permits the use of text-to speech (TTS) output project concerns Web based presentations, both it and the technologies. A primary objective is to hold and enhance enclosed application possess the basic feature of augmenting student interest with a variety of voices – the human human narration with TTS to capture audience attention and lecturer/narrator and one or more TTS voices. This paper to hold their interest. provides a Microsoft .NET framework 2.0 application that In a paper titled “Use of Interactive Multimedia to uses Microsoft Agent® for on demand TTS capability. -
Microsoft Azure Responses to Cloud Security Alliance Consensus Assessments Initiative Questionnaire V3.0.1
Microsoft Azure Responses to Cloud Security Alliance Consensus Assessments Initiative Questionnaire v3.0.1 http://www.microsoft.com/trust Microsoft Azure Responses to the Cloud Security Alliance Consensus Assessments Initiative Questionnaire NOTE: Certain recommendations contained herein may result in increased data, network, or compute resource usage, and increase your license or subscription costs. Version 1, Published March 2016 This document is for informational purposes only. MICROSOFT MAKES NO WARRANTIES, EXPRESS, IMPLIED, OR STATUTORY, AS TO THE INFORMATION IN THIS DOCUMENT. (c) 2016 Microsoft Corporation. All rights reserved. This document is provided "as-is." Information and views expressed in this document, including URL and other Internet Web site references, may change without notice. You bear the risk of using it. Some examples are for illustration only and are fictitious. No real association is intended or inferred. This document does not provide you with any legal rights to any intellectual property in any Microsoft product. You may copy and use this document for your internal, reference purposes. P A G E | 02 Microsoft Azure Responses to the Cloud Security Alliance Consensus Assessments Initiative Questionnaire Table of Contents 1 INTRODUCTION ......................................................................................................................................... 4 MICROSOFT AZURE RESPONSES TO CSA CAIQ V3.0.1................................................................................. 5 APPLICATION -

(MMX) User's Guide: Introduction
Introduction 1 1.1 Introduction to M-Alarm Multimedia Welcome to M-Alarm Multimedia (M-Alarm MMX), a stand-alone product that allows you to configure alarms using several different media to notify anyone, anywhere, of an occurring alarm. M-Alarm Multimedia provides multimedia technology for remote alarm notification. Various multimedia "agents" are provided, including: • Pager with support for Simple Message Server (SMS)/Tele Alphanumeric Protocol (TAP) and two-way paging • Phone with call-in and call-out support • E-mail • Fax • Voice annunciation of alarms via text-to-speech • Voice annunciation of alarms via recorded .wav files • Video • Pop-up windows • Computer screen marquee • Instant messaging © 2002 Johnson Controls, Inc. www.johnsoncontrols.com Code No. LIT-1201169 Software Release 5.1 2 M-Alarm Multimedia User’s Guide 1.1 M-Alarm Multimedia Overview Figure 1.1 provides an overview of how M-Alarm Multimedia enables you to send and receive alarms using various multimedia agents. The Multimedia Configurator is a database-generating tool that allows you to configure alarms, alarm action sets, multimedia agents, and alarm acknowledgement codes. You can also use the Multimedia Configurator to create subscriptions to OLE for Process Controls (OPC) Alarm and Event (AE) servers. In addition, you can configure schedules and destinations for alarm notification messages. When your database configuration is completed and you start the Multimedia Server, the following occurs: 1. When the Multimedia Server enters runtime mode, it reads all the alarm configurations in the multimedia configuration database. 2. The Multimedia Server then subscribes to OPC AE servers based on the subscriptions that you created in the configuration database. -

Scripting COM Components in Haskell
Scripting COM comp onents in Haskell Simon Peyton Jones simonpjdcsglaacuk Erik Meijer erikcsruunl University of Glasgow University of Utrecht Daan Leijen leijenwinsuvanl University of Amsterdam Abstract system higher order functions lazy evaluation and convenient syntax In particular we describ e an The expressiveness of higherorder typed languages interface b etween Haskell and Microsofts Comp onent such as Haskell or ML makes them an attractive Ob ject Mo del COM that makes it easy to script medium in which to write software comp onents Hith COM comp onents from a Haskell program We make erto however their use has b een limited by the all two main contributions ornothing problem it is hard to write just part of an application in these languages We describ e a graceful and stronglytyped inte Comp onentbased programming using a binary stan gration of COM into Haskell dard such as Microsofts Comp onent Ob ject Mo del If the exercise is to b e more than just Gosh we COM oers a solution to this dilemma by sp ecify can script COM in Haskell as well as in Visual ing a languageindep endent interface b etween comp o Basic then it is imp ortant to demonstrate some nents This pap er rep orts ab out our exp erience with added value from using a higherorder typed lan exploiting this opp ortunity in the purelyfunctional guage We oer such a demonstration in the form language Haskell We describ e a design for integrat of an extended case study ing COM comp onents into Haskell programs and we demonstrate why someone might want to script their -

Robot Control with Speech Recognition
International Journal of Engineering and Technical Research (IJETR) ISSN: 2321-0869, Volume-2, Issue-5, May 2014 Robot Control with Speech Recognition Shirish Sharma, Asst. Prof. Sukhwinder Singh recognize what you are saying. Speech recognition in a Abstract— Speech is the most important way of general environment depends on the following factors: communication for people. Using the speech as an interface for Utterance processes has become more important with the improvements Speaker Dependence in artificial intelligence. In this project it is implemented to Vocabularies control a robot with speech comments. Speech commands were taken to the computer by a Accuracy microphone, the features were extracted and recognized with Training Microsoft Visual Studio 2008 (based on C#) which is an integrated development environment (IDE) from Microsoft. Some speech recognizers have the ability to adapt to a It is basically used to develop console and graphical user speaker. When the system has this ability, it may allow interface applications. Finally the comments were converted to training to take place. A speech recognition system is trained the form which the robot can recognize and thus, move by having the speaker repeat standard or common phrases accordingly using the Arduino Software which is an open and adjusting its comparison algorithms to match that source electronics prototyping platform based on flexible, easy to use hardware and software. particular speaker. Training a recognizer usually improves its accuracy. Index Terms— Speech recognition, Arduino Uno, robot Training can also be used by speakers that have difficulty in control, SAPI speaking, or pronouncing certain words. As long as the speaker can consistently repeat an utterance, speech recognition systems with training should be able to adapt. -

Download Xbox Wireless Controller Driver for Pc XBOX PC DONGLE DRIVER WINDOWS
download xbox wireless controller driver for pc XBOX PC DONGLE DRIVER WINDOWS. I retired my Xbox one controller + adapter combo and replaced it with the Xbox One S version with built in bluetooth. Over on the network, XP. Enjoy the reliable wireless connection to your PC. If you should auto-sync with the enhanced precision. Experience the action like never before with the Xbox One Controller + Wireless Adapter for Windows 10. Click update driver / browse computer for driver software. I don't feel like giving Microsoft $25 for a dongle. There might be a way to plug dongle into PC and then share it out from there but not tried this, but again that will be adding even more latency on top of the already bad latency you'll be getting anyway. 3, you might be getting anyway. Xbox 360 controller directly without an official Microsoft $29. You can help protect yourself from scammers by verifying that the contact is a Microsoft Agent or Microsoft Employee and that the phone number is an official Microsoft global customer service number. The Xbox One and PC both need to be on the same network, and the network connection needs to be strong and fast enough to handle streaming. 0 or Xbox 360 Wired Controllers themselves approximately 2001-2003. Visual when it to Windows 10, 8. PRINTER. Guide on how to Connect Xbox Controller to PC with Windows 10 wireless USB adapter, and unboxing Play and Charge Kit. The Lowest price for a PC? The new and PC and other products. Microsoft Xbox Wireless Controller + Wireless Adapter for Windows 10. -

Microsoft®Agent
Using the Microsoft Agent Character Editor ActiveX™ Technology for Interactive Software Agents Last updated: August 1997 Microsoft Corporation Note: This document describes the Microsoft Agent Character Editor for Microsoft Agent, which you can download from http://www.microsoft.com/workshop/prog/agent/agentdl.htm. Note: This document is provided for informational purposes only and Microsoft makes no warranties, either expressed or implied, in this document. The entire risk of the use or the results of this document remains with the user. Information in this document is subject to change without notice. Companies, names, and data used in examples herein are fictitious unless otherwise noted. No part of this document may be reproduced or transmitted in any form or by any means, electronic or mechanical, for any purpose, without the express written permission of Microsoft Corporation. Microsoft may have patents or pending patent applications, trademarks, copyrights, or other intellectual property rights covering subject matter in this document. The furnishing of this document does not give you any license to these patents, trademarks, copyrights, or other intellectual property rights. Microsoft, MS, MS-DOS, Windows, Windows NT, and the Windows logo are either registered trademarks or trademarks of Microsoft Corporation in the U.S. and/or other countries. Other product and company names mentioned herein may be the trademarks of their respective owners. Contents Introduction Installing the Agent Character Editor Starting the Agent Character Editor Defining a New Character Command Reference Toolbar buttons Introduction The Microsoft® Agent Character Editor enables you to compile character animations for use with Microsoft Agent. You can define animations by importing Windows bitmap images, setting their duration, and optionally including branching, sound effects, and speaking overlays.