What Is Morphological Computation?
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

BIOSC 0805: the HUMAN BODY Department of Biological Sciences University of Pittsburgh
Syllabus: Biosc 0805, The Human Body BIOSC 0805: THE HUMAN BODY Department of Biological Sciences University of Pittsburgh Faculty Zuzana Swigonova, Ph.D. Office: 356 Langley Hall (Third floor, the bridge between Clapp and Langley halls) tel.: 412-624-3288; email: [email protected] Office hours Office hours: Mondays 10:00 – 11:30 AM, 356 Langley Hall Wednesdays 1:00 – 2:30 PM, 356 Langley Hall Office hours by appointment can be arranged by email. Lecture Time Tuesdays & Thursdays, 2:30 – 3:45 PM, 169 Crawford Hall Course objectives This is a course in human biology and physiology for students not majoring in biology. The goal is to provide students with an understanding of fundamental principles of life with an emphasis on the human body. We will start by covering basic biochemistry and cell biology and then move on to the structure and function of human organ systems. An essential part of the course is a discussion of health issues of general interest, such as infectious, autoimmune and neurodegenerative diseases; asthma and allergy; nutrition and health; stem cells research and cloning; and methods of contraception and reproductive technologies. Textbook • Biology. A guide to the natural world, by David Krogh. Pearson, Benjamin Cummings Publishing Company. (ISBN#:0-558-65495-9). This is custom made textbook that includes only the parts of the original edition that are covered in the course. It is available in the Pitt bookstore. • You can also use the full 4th or 3rd edition, however, be aware that the chapters in earlier editions are rearranged in a different order and may be lacking some parts included in the later edition. -

Chapter 32 FOREIGN BODIES of the HEAD, NECK, and SKULL BASE
Foreign Bodies of the Head, Neck, and Skull Base Chapter 32 FOREIGN BODIES OF THE HEAD, NECK, AND SKULL BASE RICHARD J. BARNETT, MD* INTRODUCTION PENETRATING NECK TRAUMA Anatomy Emergency Management Clinical Examination Investigations OPERATIVE VERSUS NONOPERATIVE MANAGEMENT Factors in the Deployed Setting Operative Management Postoperative Care PEDIATRIC INJURIES ORBITAL FOREIGN BODIES SUMMARY CASE PRESENTATIONS Case Study 32-1 Case Study 32-2 Case Study 32-3 Case Study 32-4 Case Study 32-5 Case Study 32-6 *Lieutenant Colonel, Medical Corps, US Air Force; Chief of Facial Plastic Surgery/Otolaryngology, Eglin Air Force Base Department of ENT, 307 Boatner Road, Suite 114, Eglin Air Force Base, Florida 32542-9998 423 Otolaryngology/Head and Neck Combat Casualty Care INTRODUCTION The mechanism and extent of war injuries are sig- other military conflicts. In a study done in Croatia with nificantly different from civilian trauma. Many of the 117 patients who sustained penetrating neck injuries, wounds encountered are unique and not experienced about a quarter of the wounds were from gunshots even at Role 1 trauma centers throughout the United while the rest were from shell or bomb shrapnel.1 The States. Deployed head and neck surgeons must be injury patterns resulting from these mechanisms can skilled at performing an array of evaluations and op- vary widely, and treating each injury requires thought- erations that in many cases they have not performed in ful planning to achieve a successful outcome. a prior setting. During a 6-month tour in Afghanistan, This chapter will address penetrating neck injuries all subspecialties of otolaryngology were encountered: in general, followed specifically by foreign body inju- head and neck (15%), facial plastic/reconstructive ries of the head, face, neck, and skull base. -

1 Introduction to Cell Biology
1 Introduction to cell biology 1.1 Motivation Why is the understanding of cell mechancis important? cells need to move and interact with their environment ◦ cells have components that are highly dependent on mechanics, e.g., structural proteins ◦ cells need to reproduce / divide ◦ to improve the control/function of cells ◦ to improve cell growth/cell production ◦ medical appli- cations ◦ mechanical signals regulate cell metabolism ◦ treatment of certain diseases needs understanding of cell mechanics ◦ cells live in a mechanical environment ◦ it determines the mechanics of organisms that consist of cells ◦ directly applicable to single cell analysis research ◦ to understand how mechanical loading affects cells, e.g. stem cell differentation, cell morphology ◦ to understand how mechanically gated ion channels work ◦ an understanding of the loading in cells could aid in developing struc- tures to grow cells or organization of cells more efficiently ◦ can help us to understand macrostructured behavior better ◦ can help us to build machines/sensors similar to cells ◦ can help us understand the biology of the cell ◦ cell growth is affected by stress and mechanical properties of the substrate the cells are in ◦ understanding mechan- ics is important for knowing how cells move and for figuring out how to change cell motion ◦ when building/engineering tissues, the tissue must have the necessary me- chanical properties ◦ understand how cells is affected by and affects its environment ◦ understand how mechanical factors alter cell behavior (gene expression) -

Human Anatomy and Physiology
LECTURE NOTES For Nursing Students Human Anatomy and Physiology Nega Assefa Alemaya University Yosief Tsige Jimma University In collaboration with the Ethiopia Public Health Training Initiative, The Carter Center, the Ethiopia Ministry of Health, and the Ethiopia Ministry of Education 2003 Funded under USAID Cooperative Agreement No. 663-A-00-00-0358-00. Produced in collaboration with the Ethiopia Public Health Training Initiative, The Carter Center, the Ethiopia Ministry of Health, and the Ethiopia Ministry of Education. Important Guidelines for Printing and Photocopying Limited permission is granted free of charge to print or photocopy all pages of this publication for educational, not-for-profit use by health care workers, students or faculty. All copies must retain all author credits and copyright notices included in the original document. Under no circumstances is it permissible to sell or distribute on a commercial basis, or to claim authorship of, copies of material reproduced from this publication. ©2003 by Nega Assefa and Yosief Tsige All rights reserved. Except as expressly provided above, no part of this publication may be reproduced or transmitted in any form or by any means, electronic or mechanical, including photocopying, recording, or by any information storage and retrieval system, without written permission of the author or authors. This material is intended for educational use only by practicing health care workers or students and faculty in a health care field. Human Anatomy and Physiology Preface There is a shortage in Ethiopia of teaching / learning material in the area of anatomy and physicalogy for nurses. The Carter Center EPHTI appreciating the problem and promoted the development of this lecture note that could help both the teachers and students. -
The Human Body Is Like a Complex Machine, with Many Little Parts That Work by Themselves Or with Other Parts to Perform Specific Functions
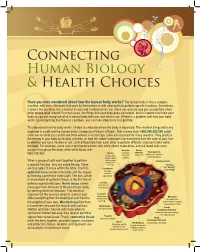
Have you ever wondered about how the human body works? The human body is like a complex machine, with many little parts that work by themselves or with other parts to perform specific functions. Sometimes, it seems like our body has a mind of its own and it embarrasses you. Have you ever passed gas accidentally when other people were around? In most cases, the things that your body does are normal, but it’s important to know your body so you can recognize what is normal body behavior and what is not. If there is a problem with how your body works, by recognizing that there is a problem, you can take steps to fix it or get help. To understand how the body works, it helps to understand how the body is organized. The smallest living unit in any organism is a cell and the human body is made up of trillions of them. That is more than 1,000,000,000,000 cells! Cells are so small you cannot see them without a microscope. Cells are important for many reasons. They produce the energy in your body to do daily activities, or hold the coded instructions for everything from the color of your hair to whether you have freckles or not. Cells differentiate from each other to perform different, important tasks within the body. For example, some cells might become brain cells while others make bone, and red blood cells carry oxygen throughout the body, while white blood cells fight infection. When a group of cells work together to perform ?a specific function, they are called tissue. -

An Introduction to Human Anatomy & Physiology
HUMAN ANATOMY & PHYSIOLOGY Human Anatomy & Physiology is a course in which students develop conceptual knowledge of the human body. Through instruction, including laboratory activities, students apply concepts associated with human anatomy and physiology. Studies will include the process of homeostasis and the essentials of human function at the level of genes, cells, tissues, and organ systems. Students are to understand the structure, organization, and function of the various components of the healthy human body in order to apply this knowledge in all health-related fields. Students enrolled in this course will gain a basic understanding of the principles of atomic structure, bonding, molecules, and structural formulas, types of chemical reactions, principles of acids and bases, and molarity- as these topics relate to the human body. The course should include ample laboratory experiences that illustrate the application of the standards to the appropriate cells, tissues, organs, and organ systems. Dissection and simulation are both appropriate and necessary. Quarter 1 Quarter 2 Quarter 3 Quarter 4 1. Safety, Inquiry and an introduction to HA&P 1 wk 2. Cells, Fluids and Homeostasis 5wks 3. Movement and Support in Humans 3weeks 4. Structure and Function of the Nervous System 4wks 5. Cardiothoracic organ systems 5wks 1wk 6. Nutrition, Digestive and Urinary system 5 wks 7. Immune Structure and Function 3wks 8. Genetics and Structure, Function and Hormonal Control of Reproductive Systems 9 weeks QUARTER 1 An introduction to Human Anatomy & Physiology Standard: APa: The student will demonstrate an understanding of how scientific inquiry and technological design, including Mathematical analysis, can be used appropriately to pose questions, seek answers, and develop solutions. -

The Human Body Book
By Helen and Mark Warner www.teachingpacks.co.uk © Teaching Packs - The Human Body - Page 1 Image © ThinkStock Thank you for downloading this e-book from Teaching Packs. We hope that it, along with the accompanying resources, are useful to you and the children that you teach. Please be aware of the following information before using this book. Please DO: * Print and copy this book (on paper or electronically), so that you can use it with the children that you teach. * Tell others if you have found it useful. * Email [email protected] if you have any suggestions, or find any mistakes, so that we can continue to improve the book in the future. Please DO NOT: * Copy or share this book (in part or whole) with others who have not joined our site. By becoming a member for themselves, they will help us to continue making more fantastic resources for everyone in the future. Thank you, Mark and Helen Warner © Teaching Packs - The Human Body - Page 2 Introduction The Skin 4 Why is skin so important? 23 The Skeleton The Eyes What does the skeleton do? 6 How do we see? 26 The Muscles The Ears Why do we have muscles? 10 How do we hear? 28 The Lungs The Nose and Mouth How do we breathe? 13 How do we smell and taste? 31 The Heart The Nervous System How does blood move around the body? 16 What are nerves for? 35 The Digestive System The Immune System How does the body break down food? 19 How do we protect ourselves against infection? 37 The Kidneys Staying Healthy How does the body get rid of waste? 21 Why are diet and exercise so important? 40 All the underlined words in this book can be found in the glossary (on page 43). -

PUBERTY: MY CHANGING BODY Lesson 2
PUBERTY: MY CHANGING DIFFERING ABILITIES BODY Lesson 2 LEARNER OUTCOME Identify, label and discuss human reproductive body parts. MATERIALS: 1. Public Parts Illustrations (unlabelled &labelled) 2. Private Parts Illustrations (unlabelled & labelled) 3. Whole Body Including Public and Private Parts Illustration 4. Body Outlines 5. Male Reproductive Parts (unlabelled & labelled) 6. Female Reproductive Parts (unlabelled & labelled) 7. Female & Male Puberty Progression Illustrations INTRODUCTION : I t is important for students to identify the physical changes that will happen during puberty and to learn how to take care of their growing bodies. This lesson will help students to become familiar with the appropriate terms for reproductive body parts, a skill that can help students stay safe. Teaching students when to talk about body parts in conversation is an important concept as students learn about public versus private behaviours. APPROACHES/STRATEGIES: A. GROUND RULES Ensure ground rules are established before beginning this lesson. For classes that have already established ground rules, quickly reviewing them can promote a successful lesson. DA.201708 © 2017 teachingsexualhealth.ca 1 You should be prepared for giggles in your class. Try to Having Ground acknowledge students’ reactions to the subject by Rules in place can be saying that puberty and body parts can be difficult to a very successful way talk about and it’s ok to feel a bit uncomfortable. to facilitate a positive classroom B. ESTABLISHING LANDMARKS – TALKING environment. Click ABOUT PRIVATE BODY PARTS here for more information on how to 1. Get your students to feel for their hipbones. set up ground rules. 2. Explain that we are going to be talking about our bodies, the changes our bodies go through as we grow up and the names for our private body parts. -

Chapter 1: the Human Organism 1 Chapter 1 Outline 1.1 Anatomy and Physiology 1.2 Structural and Functional Organization of the Human Body A
Chapter 1 The Human Organism Chapter 1: The Human Organism 1 Chapter 1 Outline 1.1 Anatomy and Physiology 1.2 Structural and functional organization of the human body A. 11 Organ Systems 1.3 Characteristics of Life 1.4 Biomedical Research 1.5 Homeostasis A. Negative feedback B. Positive feedback 1.6 Terminology and the Body plan A. Body Position B. Directional terms C. Body parts and regions D. Planes E. Body Cavities F. Serous Membranes Chapter 1: The Human Organism 2 1.1 Anatomy and Physiology Anatomy Physiology • Scientific discipline that • Scientific investigation of investigates body the processes or functions of living things. structure & examines the • Goal: relationship between – Understand & predict body’s structure and function responses to stimuli – Understand how the body maintains conditions with a narrow range of values in a constantly changing environment. Study of the human body encompasses both because they are highly interwoven. Chapter 1: The Human Organism 3 Various types of study: • Anatomy: • Physiology: – Developmental Anatomy – Cell Physiology • Embryology – Systemic Physiology – Cytology – Neurophysiology • Histology – Cardiovascular – Gross Anatomy physiology • Regional – Exercise physiology • Systemic Usually physiological – Surface Anatomy study is systemic – Anatomical Anomalies because functions occur in multiple places in the body. – Pathology Chapter 1: The Human Organism 4 Anatomical Imaging 1. Radiograph 2. Ultrasound 3. Computed tomography 4. Dynamic subtraction angiography 5. Magnetic resonance imaging 6. Positron emission tomography • Table 1.1 Page 3 Chapter 1: The Human Organism 5 1.2 Struc & Fxnl Organization- Human Body 1. Chemical Level: Involves interactions of atoms coming 2. Cellular Level: together to form more Basic structural & 3. -

Studing Cells
Studing Cells What are cells? Cells provide structure and function for all living things, from microorganisms to humans. Scientists consider them the smallest form of life. Cells house the biological machinery that makes the proteins, chemicals, and signals responsible for everything that happens inside our bodies. What do cells look like? Cells come in different shapes—round, flat, long, star-like, cubed, and even shapeless. Most cells are colorless and see-through. The size of a cell also varies. Some of the smallest are one-celled bacteria, which are too small to see with the naked eye, at 1-millionth of a meter (micrometer) across. Plants have some of the largest cells, 10–100 micrometers across. The human cell with the biggest diameter is the egg. It is about the same diameter as a hair strand (80 micrometers). How many different types of human cells are there? Fibroblast cells with nuclei (blue, circular, center), energy factories The trillions of cells that make up a human are organized into about 200 major (green, surrounding the nucleus), and types. All of a person’s cells contain the same set of genes (learn more on the the actin cytoskeleton (red, outermost). Credit: Dylan Burnette and Jennifer Genetics Home Reference What is a gene? webpage). However, each cell type Lippincott-Schwartz, Eunice Kennedy “switches on” a different pattern of genes, and this determines which proteins the Shriver National Institute of Child Health cell produces. The unique set of proteins in different cell types allows them to and Human Development, National perform specialized tasks. For instance, red blood cells carry oxygen throughout the Institutes of Health. -

A Cell Biology Unit for Grades 5 Through 7 Developed by Washington MESA and University of Washington Genome Sciences Education Outreach
H2D9:?8E@?>6D22?5 F?:G6CD:EJ@7H2D9:?8E@? 86?@>6D4:6?46D65F42E:@?@FEC6249 2>2K:?8! Dfmmt B!Dfmm!Cjpmphz!Voju!gps!Hsbeft!6!uispvhi!8 !Nfhbo!U/!Cspxo-!Qi/E/-!Nbvsffo!Nvoo-!Qi/E/-!Mbvsb!Uzmfs 2>2K:?846==D " Amazing Cells—A Cell Biology Unit for Grades 5 through 7 Developed by Washington MESA and University of Washington Genome Sciences Education Outreach Authors Megan T. Brown, Ph.D., Maureen Munn, Ph.D., Laura Tyler Writing and Development Team Megan T. Brown, Ph.D. Department of Genome Sciences Education Outreach University of Washington Seattle, WA Maureen Munn, Ph.D. Department of Genome Sciences Education Outreach University of Washington Seattle, WA Laura Tyler Washington MESA (Math, Engineering, and Science Achievement) University of Washington Seattle, WA Field Test Teachers Kim Wagner North Bend Elementary School North Bend, WA Mary Holmberg Meadows Elementary School Meadows, WA Constance Wood Seattle MESA University of Washington Seattle, WA Document Design and Production: Jo-Ann Sire, John Linse,and Jessie Schutzenhofer Illustrations: Diana Lim, Maureen Munn, Megan Brown Development of the Amazing Cells curriculum was supported by Washington MESA and grants from the Howard Hughes Medical Institute, the National Human Genome Research Institute, the Gates Foundation, and Amgen Foundation. Copyright © 2007 by the University of Washington. All rights reserved. Permission is granted to reproduce items in this unit for classroom use. This copyright, however, does not cover reproduction of these items for any other use. For permissions and other rights under this copyright, please contact: Laura Tyler University of Washington Box 352181 Seattle, WA 98195 (206) 543-0562 [email protected] Maureen Munn, Ph.D. -

Understanding the Body, Day 1: Anatomy Special Education: Secondary, Lesson #16
Family Life and Sexual Health, Special Education, Lesson 16 F.L.A.S.H. Understanding the Body, Day 1: Anatomy Special Education: Secondary, Lesson #16 Student Learning Objectives: To be able to... 1. Correctly label themselves as male or female. 2. Identify private parts of the body. 3. Correctly label non-genital parts of the body using appropriate vocabulary 4. Correctly label genital parts of the body using appropriate vocabulary Materials Needed: One copy for each student of Worksheets 1, 3, 6 & 8 and of the Handout 10 Ten Transparencies Agenda: 1. Review gender identification 2. The whole body - with private parts covered 3. Private parts of the body 4. The whole body - with private parts uncovered 5. Reproductive parts (internal) 6. Reproduction anatomy vocabulary Public Health – Seattle & King County ©1991, Rev. 2006 www.kingcounty.gov/health/flash 16 - 1 Family Life and Sexual Health, Special Education, Lesson 16 F.L.A.S.H. In order for your students to understand the upcoming puberty and reproductive biology lessons, they must first have a firm grasp of the concept of human anatomy - body parts. You may also want to consider teaching reproduction as part of a unit on body systems - including the digestive, circulatory, muscular systems, etc. This places reproduction appropriately as one of many fascinating systems of the human body. Activities: “Body Parts” 1. Review gender identification A. Tell students that “today’s lesson is about body parts. We are going to learn about names for different body parts. B. As a warm-up, repeat the gender identification exercise: Ask first for all the males in the class to stand up and then the females, unless you have students with significant gender variance or who are transgender, for whom the exercise might not be fair.