Application of Magnetic Amplifiers to Electronic Computers
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Technical Details of the Elliott 152 and 153
Appendix 1 Technical Details of the Elliott 152 and 153 Introduction The Elliott 152 computer was part of the Admiralty’s MRS5 (medium range system 5) naval gunnery project, described in Chap. 2. The Elliott 153 computer, also known as the D/F (direction-finding) computer, was built for GCHQ and the Admiralty as described in Chap. 3. The information in this appendix is intended to supplement the overall descriptions of the machines as given in Chaps. 2 and 3. A1.1 The Elliott 152 Work on the MRS5 contract at Borehamwood began in October 1946 and was essen- tially finished in 1950. Novel target-tracking radar was at the heart of the project, the radar being synchronized to the computer’s clock. In his enthusiasm for perfecting the radar technology, John Coales seems to have spent little time on what we would now call an overall systems design. When Harry Carpenter joined the staff of the Computing Division at Borehamwood on 1 January 1949, he recalls that nobody had yet defined the way in which the control program, running on the 152 computer, would interface with guns and radar. Furthermore, nobody yet appeared to be working on the computational algorithms necessary for three-dimensional trajectory predic- tion. As for the guns that the MRS5 system was intended to control, not even the basic ballistics parameters seemed to be known with any accuracy at Borehamwood [1, 2]. A1.1.1 Communication and Data-Rate The physical separation, between radar in the Borehamwood car park and digital computer in the laboratory, necessitated an interconnecting cable of about 150 m in length. -

A 'T97- 7- Art97- 3
June 22, 1965 SHINTAROOSHIMA ETAL 3,191,053 SIGN DETECTING SYSTEM Fillied Aug. 19, 1960 6 Sheets-Sheet I A 't97- 7- Art97- 3. fend za June 22, 1965 sHINTARO osHIMA ETAL 3,191,053 SIGN DETECTING SYSTEM Filed Aug. 19, 1960 6 Sheets-Sheet 2 Az7-2- ...C I / I I,/ III Asg - F - - June 22, 1965 SHINTARO OSHIMA ETAL 3,191,053 SIGN DETECTING SYSTEM Filled Aug. 19, 1960 6 Sheets-Sheet 3 Zz7- 6 - A - G7 - 9 e2f ASA, a A. A1 A. 62. APPS C AMe O) C As if Asa Af A. O) Z/2 Me O) At(6) A2 ; : : : A2 : WarfO) 72AA Merg 3.N. y eaa June 22, 1965 SHINTARO OSHIMA ETAL 3,191,053 SIGN DETECTING SYSTEM Filed Aug. 19, 1960 6 Sheets-Sheet 4 Z'67-72. A 't:9-73 - As? A. Ca -- G, Ay + \ 42 a .2A A 7 aia 2 A/ A1 Az/4A, Og /We AZeO A.O. We A4 2% O A7. June 22, 1965 SHINTARO OSHIMA ETAL 3,191,053 SIGN DETECTING SYSTEM Filed Aug. 19, l960 6 Sheets-Sheet 5 (o) June 22, 1965 SHINTARO OSHIMA ETAL 3,191,053 SIGN DETECTING SYSTEM Fiied Aug. 19, 1960 6 Sheets-Sheet 6 3,191,053 United States Patent Office Patiented June 22, 1965 2 FIG. 4 is a wave diagram for showing an example of 3,191,053 control time chart for describing the operating principle SIGN DETECTING SYSTEM of the system of the present invention; Shintaro Oshima, Tokyo-to, Hajime Enomoto, ichikawa FIGS. 5 (A) and (B) are characteristic curves for de shi, and Shiyoji Watanabe and Yasuo Koseki, Tokyo-to, 5 scribing an operation principle of the system of the Japan, assignors to Kokusai Denshin Denwa Kablishiki present invention; Kaisha, Tokyo-to, Japan FIGS. -

Magnetic Amplifiers & Saturable Reactors
Magnetic amplifiers & Saturable reactors Ricciarelli Fabrizio 01/01/2016 Magnetic amplifiers and saturable reactors Summary SECTION I.......................................................................................................................................................... 2 What are the saturable reactors .................................................................................................................. 2 SECTION II ......................................................................................................................................................... 3 Types of reactors .......................................................................................................................................... 3 Saturable reactors .................................................................................................................................... 4 Linear reactors .......................................................................................................................................... 4 Control modules ....................................................................................................................................... 4 SECTION III ........................................................................................................................................................ 5 History ......................................................................................................................................................... -
The Magnetic Amplifier a Lost Technology of the 1950S Anyone Can Build It! ■ by George Trinkaus
Trinkaus.qxd 1/11/2006 1:04 PM Page 68 The Magnetic Amplifier A Lost Technology of the 1950s Anyone can build it! ■ by George Trinkaus ost folks believe that first came the vacuum tube and right on its heels came its successor, the transistor — an historical fact, correct? Not really. Another competitive control technology developed by US and Nazi engineers came in between. It was the magnetic amplifier. Rugged, dependable, EMP- proof, and capable of handling greater electrical powers than either transistor or tube, the magnetic amplifier is a simple device that can be built by anyone. By the 1950s, the magnetic amplifier M was not just an experimental dream languishing in some inventor’s notebook. Nor was this ingenious technology sitting unexploited in patent archives. The mag amp was in manufac- ture in a number of versions and had a clique of boosters, including many electronics engineers, especially within the US Navy. ■ Home-built Mag Amp. 68 February 2006 Trinkaus.qxd 1/11/2006 1:05 PM Page 69 ■ FIGURE 1. Principle of Operation. ■ FIGURE 2. Saturable Reactor. The mag amp is an American that’s the definition of an “amplifier.” core’s permeability (its receptivity to invention and has been used in heavy A mag amp can be put in series magnetism) can be varied by degrees, electrical machinery regulators since with any circuit carrying an alternat- thus controlling a larger AC flow. 1900. In the 1940s, the Germans took ing current and control that flow. No Fully energized, the control coil the American’s relatively crude device, external power supply is required to can reduce the permeability of the assigned their best scientists, invested run the device. -

Lawrence Berkeley National Laboratory Recent Work
Lawrence Berkeley National Laboratory Recent Work Title EXPERIMENTAL AND EXTERNAL-PROTON-BEAM MAGNET POWER-SUPPLY SYSTEMS AT THE BEVATRON Permalink https://escholarship.org/uc/item/05r5c6gp Author Jackson, Leslie T. Publication Date 1965-02-11 eScholarship.org Powered by the California Digital Library University of California UCRL-11793 University of California Er'nest 0. lawrence Radiation Laboratory EXPERIMENTAL AND EXTERNAL-PROTON-BEAM MAGNET POWER-SUPPLY SYSTEMS AT THE BEVATRON TWO-WEEK LOAN COPY This is a Library Circulating Copy which may be borrowed for two weeks. For a personal retention copy, call Tech. Info. Division, Ext. 5545 ·Berkeley, California DISCLAIMER This document was prepared as an account of work sponsored by the United States Government. While this document is believed to contain correct information, neither the United States Government nor any agency thereof, nor the Regents of the University of California, nor any of their employees, makes any warranty, express or implied, or assumes any legal responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by its trade name, trademark, manufacturer, or otherwise, does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States Government or any agency thereof, or the Regents of the University of California. The views and opinions of authors expressed herein do not necessarily state or reflect those of the United States Government or any agency thereof or the Regents of the University of California. -
Approved for Public Release. Case 06-1104
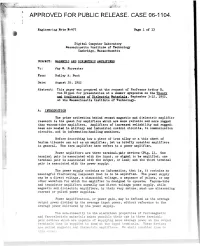
APPROVED FOR PUBLIC RELEASE. CASE 06-1104. Engineering Bote E-477 Page 1 of 13 Digital Computer laboratory Massachusetts Institute of Technology Cambridge, Massachusetts SUBJECT: MAGNETIC AND DIEIECTBIC AMPLIFIERS To: Jay W. Forrester From: Dudley A. Buck Date: August 28, 1952 Abstract: This paper was prepared at the request of Professor Arthur B. von Eippel for presentation at a summer symposium on the Theory and. Applications of Dielectric Materials. September 3-12, 1952, at the Massachusetts Institute of Technology* A. INTBODUCTIOH The prime motivation behind recent magnetic and dielectric amplifier research is the quest for amplifiers which are more reliable and more rugged than vacuum-tube amplifiers. Amplifiers of increased reliability and rugged- ness are needed in military and industrial control circuits, in communication circuits, and in information-handling machines* Before describing how a piece of iron alloy or a thin sheet of barium titanate can act as an amplifier, let us briefly consider amplifiers in general. The term amplifier here refers to a power amplifier* Power amplifiers are three terminal-pair devices (Fig* 1)* One terminal pair is associated with the input, or signal to be amplified; one terminal pair is associated with the output, or load; and the third terminal pair is associated with the power supply. The power supply contains no information, that is, it contains no meaningful fluctuating component that is to be amplified. The power supply can be a direct voltage, a sinusoidal voltage, a sequence of pulses, or any other waveform for which the amplifier is designed to operate* Vacuum-tube and transistor amplifiers normally use direct voltage power supply, while magnetic and dielectric amplifiers, by their very nature, must use alternating current or pulsed power supplies* Power amplification, or power gain, may be defined as the average output power divided by the average input power, without reference to the average power delivered by the power supply. -

An1007 L6561
AN1007 ® APPLICATION NOTE L6561 - BASED SWITCHER REPLACES MAG AMPS IN SILVER BOXES by Claudio Adragna Mag amps (a contraction of "Magnetic Amplifier") are widely used in multi-output switching power supplies to get auxiliary regulated power rails. However, they are expensive, bulky, and require a high level of design expertise. ST’s L6561, an 8-pin Transition Mode PFC (Power Factor Corrector) controller, is surprisingly suit- able for implementing a switch-mode architecture as an alternative to mag amps. Much better per- formance, a dramatic reduction of parts count, cost and design effort are the benefits of such an ap- proach. Drawbacks? None. And once more the L6561 turns out to be a really versatile device. Introduction Desktop computer power supplies provide two or more low-voltage, high-current, isolated power rails, typically a 5V rail and a 12V rail. More an more often, it also provides a 3.3V auxiliary rail with high-cur- rent capability. The power is generated by an off-line forward switching converter (inside the so-called "silver box") that regulates only one power rail through an isolated feedback loop. The other power rails are usually post- regulated to meet the specifications on the output voltage tolerance and regulation. A typical architecture is shown in fig. 1. Figure 1. Typical architecture of an SMPS for desktop computer ("silver box"). (ISOLATED) FEEDBACK MAIN RECTIFIER FILTER OUTPUT DC Input PWM CONTROLLER & POWER SWITCH RECTIFIER MAG AMP + REGULATOR FILTER AUXILIARY DC OUTPUTS MAIN TRANSFORMER RECTIFIER LINEAR + REGULATOR FILTER Many power supply manufacturers use magnetic amplifiers (in short, "mag amps") to achieve secondary post-regulation. -

La Marche Battery Charger Technologies
Battery Charger Technologies Vance Persons Murad Daana Engineering Manager Business Development Manager La Marche Mfg. Co. La Marche Mfg. Co. Des Plaines, IL 60018 Des Plaines, IL 60018 Abstract This paper reviews the history of the battery charger industry and provides a technical overview on the methodology of the different battery charger technologies, such as Magnetic Amplifiers, Ferro-resonant, SCR rectifiers and High Frequency Switchmode chargers. Introduction Many industrial applications such as Utility Switchgear, Oil Platforms, Gas Turbines, Process Control, etc., involve the operation of critical DC loads. Dropping any of these critical loads may result in extreme and costly circumstances. Therefore, these applications require the use of batteries as a backup power source in case of a power outage. Hence, a need was developed for equipment used to maintain the charge in the batteries. Battery charger / DC power supply technologies have been developed over the years to improve the efficiency, reliability and cost of the equipment. These different technologies serve the same purpose of supporting the DC loads and maintaining a full charge in the battery of a DC system. Each technology, however, has its advantages and disadvantages. 1 – 1 Magnetic Amplifier (Mag-Amp) Technology Magnetic Amplifier is one of the first technologies used in rectifying the AC power in DC power applications. Mag-Amp has had many development stages over the years and has over 190 patent filings. This technology started when Dr. Alexanderson submitted a paper presenting this concept to the Institute of Radio Engineers in 1916. The paper detailed replacing Vacuum Tube Rectifiers which had many disadvantages compared to Mag- Amp. -
Mag Amp Cores and Materials the Best Choice for Tightly Regulated Outputs in Switching Power Supplies
® Division of Spang & Company Technical Bulletin BULLETIN SR-4 Mag Amp Cores and Materials The best choice for tightly regulated outputs in switching power supplies Cobalt Based Proper regulation is an important con- Amorphous Material sideration in specifying and designing switching power supplies. In multiple A cobalt based alloy, has low losses, output power supplies where individual Advantages very high permeability, high square- outputs must be tightly controlled, the of Mag Amp Control: ness and low coercive force. These design can be complicated by such characteristics make the alloy most things as additional circuits, heat sinks, • Smaller size ideal for SMPS applications such as larger size, etc. magnetic amplifiers, semi-conductor • High reliability noise suppressors and high frequency The continuing need for more compact transformers. It also finds use in high and reliable switching power supplies sensitivity matching transformers and has aroused a renewed interest in a • Generally less E.M.I ultra-sensitive current transformers. well founded control technique — the Magnetic Amplifier. Mag amps mean • Higher efficiency The cobalt based alloy has near-zero higher power density, simple control magnetostriction, high corrosion resis- circuitry, very good regulation, high • Simpler circuits tance and a high insensitivity to running frequency and rugged perfor- mechanical stress. These properties mance. • Fewer components make it also useful in magnetometer applications. This bulletin describes mag amp regu- lation in switching power supplies. • Less costly for out- Which Material To Choose? Three core materials are recommend- puts over 2 amperes The selection of any of these materials ed for this application: 1 mil Permalloy depends on desired characteristics 80, 1/2 mil Permalloy 80, and cobalt and/or economic trade-offs. -

Saturable Reactor for Power Flow Control in Electric Transmission Systems: Modeling and System Impact Study
University of Tennessee, Knoxville TRACE: Tennessee Research and Creative Exchange Doctoral Dissertations Graduate School 5-2015 Saturable Reactor for Power Flow Control in Electric Transmission Systems: Modeling and System Impact Study Marcus Aaron Young II University of Tennessee - Knoxville, [email protected] Follow this and additional works at: https://trace.tennessee.edu/utk_graddiss Part of the Electromagnetics and Photonics Commons, and the Power and Energy Commons Recommended Citation Young, Marcus Aaron II, "Saturable Reactor for Power Flow Control in Electric Transmission Systems: Modeling and System Impact Study. " PhD diss., University of Tennessee, 2015. https://trace.tennessee.edu/utk_graddiss/3377 This Dissertation is brought to you for free and open access by the Graduate School at TRACE: Tennessee Research and Creative Exchange. It has been accepted for inclusion in Doctoral Dissertations by an authorized administrator of TRACE: Tennessee Research and Creative Exchange. For more information, please contact [email protected]. To the Graduate Council: I am submitting herewith a dissertation written by Marcus Aaron Young II entitled "Saturable Reactor for Power Flow Control in Electric Transmission Systems: Modeling and System Impact Study." I have examined the final electronic copy of this dissertation for form and content and recommend that it be accepted in partial fulfillment of the equirr ements for the degree of Doctor of Philosophy, with a major in Electrical Engineering. Yilu Liu, Major Professor We have read this -

Design of a Self-Saturating Magnetic Amplifier Utilizing High Frequency Excitation
Design of a self-saturating magnetic amplifier utilizing high frequency excitation Item Type text; Thesis-Reproduction (electronic) Authors Perkins, Brayton Mills, 1924- Publisher The University of Arizona. Rights Copyright © is held by the author. Digital access to this material is made possible by the University Libraries, University of Arizona. Further transmission, reproduction or presentation (such as public display or performance) of protected items is prohibited except with permission of the author. Download date 04/10/2021 10:04:12 Link to Item http://hdl.handle.net/10150/319332 DESIGN OF A SELF-SATURATING MAGNETIC AMPLIFIER UTILIZING HIGH FREQUENCY EXCITATION by Brayton M. Perkins A Thesis submitted to the faculty of the Department of Electrical Engineering in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE in the Graduate College, University of Arizona 1956 Approved: C a t * * \ . / f f Z Director of Thesis Date 5 ^ This thesis has been submitted in partial fulfillment of requirements for an advanced degree at the University of Arizona and is deposited in the Library to be made available to borrowers under rules of the Library• Brief quotations from this thesis are allowable without special permission, provided that accurate acknowledgment of source is made. Requests for permission for extended quotation from or re production of this manuscript in whole or in part may be granted by the head of the major department or the dean of the Graduate College when in their judgment the proposed use of the material is in the interests of scholarship. In all other instances, however, permission must be obtained from the author. -

The Magnetic Amplifier and Its Application to Radio Frequency Signals
Calhoun: The NPS Institutional Archive Theses and Dissertations Thesis Collection 1948 The magnetic amplifier and its application to radio frequency signals Steffen, Ernest William Annapolis, Maryland: Naval Postgraduate School http://hdl.handle.net/10945/31621 THE MAGNETIC AMPLIFJER AlID ITS APPLICATION TO RADIO FREQJJENCY SIGNAIS E. W. Steffen, Jr. THE MAGNETIC AMPLIFIER AND ITS APPLICATION TO RADIO FREQUENCY SIGNALS by Ernest William Steffen, Jr. Lieutenant Commander, United States Navy Submitted in partial fulfillment of the requirements for the degree of M.ASTER OF SCIENCE United States Naval Postgraduate School Annapolis, Maryland 1948 This work is accepted as fulfilling the thesis requirements for the degree of Master of Science in Engineering Electronics from the United states Naval Postgraduate School. Department of Fhysics and Electronics Approved: i PREFACE This paper is presented as a partial fulfillment of the requirements for the degree of Master of Science to the United states Naval Postgraduate School. The laboratory work on this sUbject was performed at the Ward Leonard Electric Company in Mount Vernon, New York, during an eleven week period which commenced on January 5, 1948. Grateful acknowledgment is given to Mr. Frank G. Logan, Mr. Warren Dornhoefer, Mr. Stephen Stienetz, and Mr. Erving Leedes, of the Ward Leonard Electric Company, for their guidance in this work. The amplification of radio frequency signals with magnetic amplifiers is believed to be original work, hence, references to this SUbject are not available. All references listed in the bibliography concern mag netism and magnetic amplifiers for direct current or signals at power frequencies o ii TABLE OF CONTENTS INTRODUCTION Page 1 CHAPTER I THEORY OF OPERATION Page 3 CHAPTER II CIRCUITS Page 16 1.