From Natural to Artificial Camouflage: Components and Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Case of Deirocheline Turtles
bioRxiv preprint doi: https://doi.org/10.1101/556670; this version posted February 21, 2019. The copyright holder for this preprint (which was not certified by peer review) is the author/funder, who has granted bioRxiv a license to display the preprint in perpetuity. It is made available under aCC-BY-NC-ND 4.0 International license. 1 Body coloration and mechanisms of colour production in Archelosauria: 2 The case of deirocheline turtles 3 Jindřich Brejcha1,2*†, José Vicente Bataller3, Zuzana Bosáková4, Jan Geryk5, 4 Martina Havlíková4, Karel Kleisner1, Petr Maršík6, Enrique Font7 5 1 Department of Philosophy and History of Science, Faculty of Science, Charles University, Viničná 7, Prague 6 2, 128 00, Czech Republic 7 2 Department of Zoology, Natural History Museum, National Museum, Václavské nám. 68, Prague 1, 110 00, 8 Czech Republic 9 3 Centro de Conservación de Especies Dulceacuícolas de la Comunidad Valenciana. VAERSA-Generalitat 10 Valenciana, El Palmar, València, 46012, Spain. 11 4 Department of Analytical Chemistry, Faculty of Science, Charles University, Hlavova 8, Prague 2, 128 43, 12 Czech Republic 13 5 Department of Biology and Medical Genetics, 2nd Faculty of Medicine, Charles University and University 14 Hospital Motol, V Úvalu 84, 150 06 Prague, Czech Republic 15 6 Department of Food Science, Faculty of Agrobiology, Food, and Natural Resources, Czech University of Life 16 Sciences, Kamýcká 129, Prague 6, 165 00, Czech Republic 17 7 Ethology Lab, Cavanilles Institute of Biodiversity and Evolutionary Biology, University of Valencia, C/ 18 Catedrátic José Beltrán Martinez 2, Paterna, València, 46980, Spain 19 Keywords: Chelonia, Trachemys scripta, Pseudemys concinna, nanostructure, pigments, chromatophores 20 21 Abstract 22 Animal body coloration is a complex trait resulting from the interplay of multiple colour-producing mechanisms. -
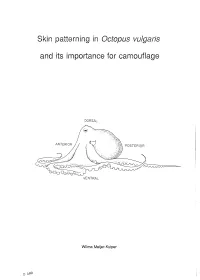
Skin Patterning in Octopus Vulgaris and Its Importance for Camouflage
Skin patterning in Octopus vulgaris anditsimportance for camouflage DORSAL ANTERiOR POSTERIOR VENTRAL Wilma Meijer-Kuiper D490 Dqo "Scriptie"entitled: j Skin patterning in Octopus vulgaris and its importance for camouflage Author: Wilma Meijer-Kuiper. Supervisor: Dr. P.J. Geerlink. April, 1993. Cover figure from Wells, 1978. Department of Marine Biology, University of Groningen, Kerklaan 30, 9750 AA Haren, The Netherlands. TABLE OF CONTENTS PAGE Abstract 1 1. Introduction 2 1.1. Camouflage in marine invertebrates 2 1 .2. Cephalopods 2 2. General biology of the octopods 4 2.1. Octopus vulgar/s 4 3. Skin patterning in Octopus 6 3.1. Patterns 6 3.2. Components 8 3.3. Units 9 3.4. Elements 10 3.4.1. Chromatophores 10 3.4.2. Reflector cells and iridophores 16 3.4.3. Leucophores 18 4. The chromatic unit 20 5. Nervous system 22 5.1. Motor units 22 5.2. Electrical stimulation 22 5.3. Projection of nerves on the skin surface 24 5.4. The nervous control system 25 5.5. Neurotransmitters 27 6. Vision in cephalopods, particularly in O.vu!garis 28 6.1. Electro-physiological experiments 28 6.2. Photopigments and receptor cells 28 6.3. Behavioural (training) experiments 29 6.4. Eye movements and optomotor responses 29 7. Camouflage in a colour-blind animal 31 7.1. Matching methods 31 7.2. Countershading reflex 35 8. Conclusive remarks 36 Literature 38 ABSTRACT Camouflage is a method by which animals obtain concealment from other animals by blending in with their environment. Of the cephalopods, the octopods have an extra-ordinary ability to match their surroundings by changing the colour and texture of their skin. -

Pigment Pattern Formation in Zebrafish 443
MICROSCOPY RESEARCH AND TECHNIQUE 58:442–455 (2002) Pigment Pattern Formation in Zebrafish: A Model for Developmental Genetics and the Evolution of Form 1 1,2 IAN K. QUIGLEY AND DAVID M. PARICHY * 1Section of Integrative Biology, University of Texas at Austin, Austin, Texas 78712 2Section of Molecular, Cell and Developmental Biology and Institute for Cellular and Molecular Biology University of Texas at Austin, Austin, Texas 78712 ABSTRACT The zebrafish Danio rerio is an emerging model organism for understanding vertebrate development and genetics. One trait of both historical and recent interest is the pattern formed by neural crest–derived pigment cells, or chromatophores, which include black melano- phores, yellow xanthophores, and iridescent iridophores. In zebrafish, an embryonic and early larval pigment pattern consists of several stripes of melanophores and iridophores, whereas xanthophores are scattered widely over the flank. During metamorphosis, however, this pattern is transformed into that of the adult, which comprises several dark stripes of melanophores and iridophores that alternate with light stripes of xanthophores and iridophores. In this review, we place zebrafish relative to other model and non-model species; we review what is known about the processes of chromatophore specification, differentiation, and morphogenesis during the develop- ment of embryonic and adult pigment patterns, and we address how future studies of zebrafish will likely aid our understanding of human disease and the evolution of form. Microsc. Res. Tech. 58: 442–455, 2002. © 2002 Wiley-Liss, Inc. INTRODUCTION number of genetic mutants have been isolated that To generate the adult body plan, cells must differen- affect pigmentation. For example, a variety of pigment tiate, proliferate, die, and migrate. -
The Biology and Ecology of the Common Cuttlefish (Sepia Officinalis)
Supporting Sustainable Sepia Stocks Report 1: The biology and ecology of the common cuttlefish (Sepia officinalis) Daniel Davies Kathryn Nelson Sussex IFCA 2018 Contents Summary ................................................................................................................................................. 2 Acknowledgements ................................................................................................................................. 2 Introduction ............................................................................................................................................ 3 Biology ..................................................................................................................................................... 3 Physical description ............................................................................................................................ 3 Locomotion and respiration ................................................................................................................ 4 Vision ................................................................................................................................................... 4 Chromatophores ................................................................................................................................. 5 Colour patterns ................................................................................................................................... 5 Ink sac and funnel organ -

Flip Your Lid for Squid!
FLIP YOUR LID FOR SQUID! Adapted from http://njseagrant.org/wp-content/uploads/2014/03/squid_dissection.pdf PURPOSE Students learn the basics of squid anatomy and physiology by conducting a squid dissection. MATERIALS • frozen whole squid—not “clean” and not cut (get whole squid in frozen section of the grocery store) • hand lenses • dissection pan (plate) • scissors • tweezers • probe or toothpick • paper towels PROCEDURE Dissection of External Anatomy • Have students observe their squids for a few moments looking at the relationship between head and the rest of the body. Then ask students why they think squid are in the family of cephalopods (head-foots). • Tentacles and Arms: Have students count the number of arms. They may use the toothpicks to spread out the squid arms. Ask if all the arms look the same? There should be eight short arms and 2 long arms. Explain that the long thin arms with suckers only at the ends are called tentacles. The tentacles large ends with suckers are known as clubs. The tentacles are used to strike out and capture prey. The eight arms are used to hold onto prey when captured and bring food into its mouth. • Suction Cups: Student may use the magnifying lenses to get a closer look at the suction cups on each arm and tentacles. The suction cups have a small-toothed ring around each one and they are on short stalks. The suction cups are like suckers that help the arms hold onto the prey when it is captured and tries to escape. • Beak and Buccal Mass: Located within the circle of arms students can locate the squids mouth which is a beak. -

Cephalopod Coloration Model. I. Squid Chromatophores and Iridophores
588 J. Opt. Soc. Am. A/Vol. 25, No. 3/March 2008 Sutherland et al. Cephalopod coloration model. I. Squid chromatophores and iridophores Richard L. Sutherland,1,2,* Lydia M. Mäthger,3 Roger T. Hanlon,3 Augustine M. Urbas,1 and Morley O. Stone1 1Air Force Research Laboratory, 3005 Hobson Way, Wright-Patterson Air Force Base, Ohio 45433-7707, USA 2Science Applications International Corporation, 4031 Colonel Glenn Highway, Dayton, Ohio 45431, USA 3Marine Resources Center, Marine Biological Laboratory, 7 MBL Street, Woods Hole, Massachusetts 02543, USA *Corresponding author: [email protected] Received September 11, 2007; revised November 28, 2007; accepted December 3, 2007; posted December 21, 2007 (Doc. ID 87405); published February 7, 2008 We have developed a mathematical model of skin coloration in cephalopods, a class of aquatic animals. Cepha- lopods utilize neurological and physiological control of various skin components to achieve active camouflage and communication. Specific physical processes of this coloration are identified and modeled, utilizing avail- able biological materials data, to simulate active spectral changes in pigment-bearing organs and structural iridescent cells. Excellent agreement with in vitro measurements of squid skin is obtained. A detailed under- standing of the physical principles underlying cephalopod coloration is expected to yield insights into the be- havioral ecology of these animals. © 2008 Optical Society of America OCIS codes: 000.1430, 050.7330, 160.1435, 240.0310, 260.3160, 330.1690. 1. INTRODUCTION -

A Study of the Chromatophore Pigments in the Skin of the Cephalopod Sepia Officinalis L
Biol. Jb. Dodonaea, 44, 1976, 345-352. A STUDY OF THE CHROMATOPHORE PIGMENTS IN THE SKIN OF THE CEPHALOPOD SEPIA OFFICINALIS L. by C. VAN DEN BRANDEN and W. DECLEIR A b s t r a c t . — In the chromatophores of the dorsal skin of the cuttlefish Sepia officinalis L. at least three different pigments can be found. They belong to the om- mochromes and they differ from each other by their color, solubility and redox behavior. Introduction Cephalopods possess a unique system of chromatophore organs and iridophores which allow very rapid physiological color changes. The iridophores form a layer of immobile reflector cells which is only exposed when the chromatophore cells are absent or fully contracted(H oi.m e s , 1940 and M ir o w , 1972, a). The morphology and structure of the chromatophore organ has been studied in detail(M ir o w , 1972, b - S e r e n i, 1930 -B o y c o t t , 1948). It is composed of a central pigment containing cell, several radially arranged obliquely striated muscle fibers, nerve cells, Schwann cells and sheath cells. The cell bodies of the fibres innervating the chromatophore muscles are concentrated in anterior and posterior chromatophore lobes, which were classified as lower motor centres (B o ycott and Y o u n g , 1950). A possible endocrine regulation of chromatophores has been proposed byK a h r (1958 and 1959). The different color changes and color patterns of cephalopods and the corresponding complex behavioral patterns have been the subject of several studies (W e l l s, 1962 -K u h n , 1950 - H o l m e s , 1940 -S e r e n i, 1930). -

Through the Looking Glass
THROUGH THE LOOKING-GLASS OF CEPHALOPOD COLOUR PATTERNS A skin-diver's guide to the Octopus brain. A. PACKARD Dept. of Zoology, University of Naples "Federico II ", Via Mezzocannone 8, Napoli 80134 and Stazione Zoologica "Anton Dohrn", I-Napoli 80121, Italy Dept. of Psychology, University of Edinburgh, 7 George Square, Edinburgh EH8 9JZ, Scotland. 1. Introduction Our supporting organisation, NATO, has shown itself ready to revise its military thinkingin face of the latest facts. As scientists we should be equally flexible. In the zoological realm,what had long been quoted as the most brilliant example of analogous structures and of convergent evolution - the similarity of the vertebrate and the cephalopod eye, despite their separate phylogenetic histories - is now revealed as having within it the seeds of an ancienthomology: perhaps as ancient as animal life itself. I refer to the recent discovery [38] that the same Homeobox gene family responsible for morphogenesis in the eye primordia of insects and of vertebrates is also contained in the germ cells of squids. It invites us to consider that the rules of Vision operating in the field of evolution - not so very different from the military field - are universal rules that have to do less with the nature of light and optics than with the tasks that can be performed with information extractable from an illuminated world. Emphasis on tasks, in turn suggests that the skin of cephalopods - clearly a successful group of animals- might be a very convenient way of arriving at these rules. Its capacity for colour change and its repertoire of signals andcompositions have, over millions of years, been directed at and tuned by the eyes that occupy behaviour space [29]. -

How to Create the Chromatophore Layer Step #1 Open up the Tri-Fold
How To Create The Chromatophore Layer Step #1 Open up the tri-fold, and make red, brown, and yellow dots on the center section. Make as many dots of each color as the number of umbrellas you have of the matching color. For example, 5 red umbrellas mean 5 red dots. Try to space the dots out equally. Step #2 Prepare one color of umbrellas at a time. Gently open each umbrella. Then, cut a section of straw about 1 inch long, and pass the toothpick end of the umbrella through it. Step #3 Color the end of the toothpick with the same-colored Sharpie (use the brown sharpie for orange umbrellas). Resource written by Randy Otaka Step #4 Place a tiny drop of glue on the runner of the umbrella (the little cuff part that moves up and down). Slide the straw over the glue, and turn it so that the glue evenly coats all sides of the runner. Let the umbrella sit so that the glue can dry. Step #5 Prop the tri-fold upright. Use the nail to prepare holes on each of the colored dots. Then, pass the toothpick end of each umbrella through the holes. Step #6 After you have inserted all the umbrellas, then you should have something that looks like this. Have a classmate or two stand behind the trifold. Call out a color (“Red”), and have them gently pull the ends of the same-colored toothpicks to open up the “chromatophores.” NOTE: The umbrellas do not close as easily. You can try to gently push the toothpicks, but if that doesn’t work, you can close them directly by hand. -

Information Feedback from Photophores and Ventral
Pacific Science (1973), Vol. 27, No.1, p. 1-7 Printed in Great Britain Information Feedback from Photophores and Ventral Countershading in Mid-Water SquidI RICHARD EDWARD YOUNG2 ABSTRACT: The arrangement ofphotosensitive vesicles and photophores in two species of mid-water squid suggests that the vesicles function in detecting the in tensity ofdownward-directed surface light and the intensity oflight from their own photophores. This information is precisely what is required for an animal to eliminate its ventral shadow by the production ofa ventral bioluminescent glow. This arrangement, therefore, offers strong support for the theory of ventral countershading in mid-water animals. CEPHALOPODS have photoreceptive structures The function of the photosensitive vesicles other than the eyes. In octopods these organs beyond their photosensitive capacity is un have been called epistellar bodies (Young, known. One probable function, however, has 1929); in squid and cuttlefish they have been recently emerged during the course of a study labeled the parolfactory vesicles (Boycott and which is attempting to correlate modifications Young, 1956). In both instances the names are of the photosensitive vesicles with certain as associated with the location of the organs: in pects of the ecology of mid-water cephalopods octopods, on the stellate ganglia; and in squid off Hawaii. and cuttlefish, near the olfactory lobe on the op I would like to thank J. Z. Young, University tic stalk of the brain. In spite of the different College London; N. B. Marshall, British Mu locations of these organs, they are probably seum (Natural History); C. F. E. Roper, Smith homologous structures (Nishioka, Hagadorn, sonian Institution; J. -

1 2 Visual Phototransduction Components in Cephalopod
1 2 3 Visual phototransduction components in cephalopod chromatophores suggest dermal 4 photoreception 5 6 Alexandra C. N. Kingston1, Alan M. Kuzirian2, Roger T. Hanlon2, and Thomas W. Cronin1 7 1Department of Biological Sciences, University of Maryland Baltimore County, 1000 Hilltop 8 Circle, Baltimore, Maryland 21250 USA 9 2Marine Biological Laboratory, Woods Hole, Massachusetts 02543, USA 10 11 Corresponding Author: 12 Thomas W. Cronin 13 Department of Biological Sciences 14 University of Maryland Baltimore County 15 Baltimore, MD 21250 16 [email protected] 17 410-455-3449 18 19 Key words: rhodopsin, retinochrome, extraocular photoreceptor, skin 20 21 Running title: Squid dermal phototransduction machinery 22 23 Abstract 24 Cephalopod molluscs are renowned for their colorful and dynamic body patterns, produced by an 25 assemblage of skin components that interact with light. These may include iridophores, 26 leucophores, chromatophores, and (in some species) photophores. Here, we present molecular 27 evidence suggesting that cephalopod chromatophores, small dermal pigmentary organs that 28 reflect various colors of light, are photosensitive. RT-PCR revealed the presence of transcripts 29 encoding rhodopsin and retinochrome within the retinas and skin of the squid Doryteuthis 30 pealeii, and the cuttlefish Sepia officinalis and Sepia latimanus. In D. pealeii, Gqα and squid 31 TRP channel transcripts were present in the retina and in all dermal samples. Rhodopsin, 32 retinochrome, and Gqα transcripts were also found in RNA extracts from dissociated 33 chromatophores isolated from D. pealeii dermal tissues. In D. pealeii, immunohistochemical 34 staining labeled rhodopsin, retinochrome, and Gqα proteins in several chromatophore 35 components, including pigment cell membranes, radial muscle fibers, and sheath cells. -

Dynamic Pigmentary and Structural Coloration Within Cephalopod Chromatophore Organs
Dynamic pigmentary and structural coloration within cephalopod chromatophore organs The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation Williams, Thomas L. et al. "Dynamic pigmentary and structural coloration within cephalopod chromatophore organs." Nature communicatins 10 (2019): 1038 © 2019 The Author(s) As Published 10.1038/s41467-019-08891-x Publisher Springer Science and Business Media LLC Version Final published version Citable link https://hdl.handle.net/1721.1/124600 Terms of Use Creative Commons Attribution 4.0 International license Detailed Terms https://creativecommons.org/licenses/by/4.0/ ARTICLE https://doi.org/10.1038/s41467-019-08891-x OPEN Dynamic pigmentary and structural coloration within cephalopod chromatophore organs Thomas L. Williams1, Stephen L. Senft2, Jingjie Yeo 3,4,5, Francisco J. Martín-Martínez4, Alan M. Kuzirian2, Camille A. Martin1, Christopher W. DiBona1, Chun-Teh Chen4, Sean R. Dinneen1, Hieu T. Nguyen 6, Conor M. Gomes 1, Joshua J.C. Rosenthal2, Matthew D. MacManes 6, Feixia Chu6, Markus J. Buehler4, Roger T. Hanlon 2 & Leila F. Deravi 1 1234567890():,; Chromatophore organs in cephalopod skin are known to produce ultra-fast changes in appearance for camouflage and communication. Light-scattering pigment granules within chromatocytes have been presumed to be the sole source of coloration in these complex organs. We report the discovery of structural coloration emanating in precise register with expanded pigmented chromatocytes. Concurrently, using an annotated squid chromatophore proteome together with microscopy, we identify a likely biochemical component of this reflective coloration as reflectin proteins distributed in sheath cells that envelop each chro- matocyte.