Piloting a Balanced Curriculum in Electrical Engineering— Introduction to Robotics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Is EE Right for You?
Erik Jonsson School of Engggineering and The Un ivers ity o f Texas a t Da llas Computer Science Is EE Right for You? • “Toto, I have a feeling we’re not in Kansas anymore.” • Now that you are here, diii?id you make the right choice? • Electrical engineering is a challenging and satisfying profession. That does not mean it is easy. In fact, with the possible exceptions of medicine or law, it is the MOST difficult. • There are some things you need to consider if you really, really want to be an engineer. • We will consider a few today. EE 1202 Lecture #1 – Why Electrical Engineering? 1 © N. B. Dodge 01/12 Erik Jonsson School of Engggineering and The Un ivers ity o f Texas a t Da llas Computer Science Is EE Right for You (2)? • Why did you decide to be an electrical engineer? – Parents will pay for engineering education (it’s what they want). – You like math and science. – A relative is an engineer and you like him/her. – You want to challenge yourself, and engineering seems challenging. – You think you are creative and love technology. – You want to make a difference in society . EE 1202 Lecture #1 – Why Electrical Engineering? 2 © N. B. Dodge 01/12 Erik Jonsson School of Engggineering and The Un ivers ity o f Texas a t Da llas Computer Science The High School “Science Student” Problem • In high school, you were FAR above the average. – And you probably didn’t study too hard, right? • You liked science and math, and they weren’t terribly hard. -

Electrical Engineering Technology
Electrical Engineering Technology Electrical Engineering Program Accreditation The Electrical Engineering Technology program at Central Piedmont is accredited by the Engineering Technology Accreditation Commission Technology (TAC) of the Accreditation Board of Engineering and Technology (ABET). The Associate in Applied Science degree in Electrical Engineering How to Apply: Technology has been specifically designed to prepare individuals to Complete a Central Piedmont admissions application through Get become advanced technicians in the workforce. Started on the Central Piedmont website. Electrical Engineering Technicians (Associates degree holders) typically build, install, test, troubleshoot, repair, and modify developmental and Contact Information production electronic components, equipment, and systems such as For questions about the program or for assistance as a student in the industrial/computer controls, manufacturing systems, instrumentation program, contact faculty advising. The Electrical Engineering Technology systems, communication systems, and power electronic systems. program is in the Engineering Technology Division. For additional information, visit the Electrical Engineering Technology website or call the A broad-based core of courses ensures that students develop the skills Program Chair at 704.330.6773. necessary to perform entry-level tasks. Emphasis is placed on developing the ability to think critically, analyze, and troubleshoot electronic systems. General Education Requirements Beginning with electrical fundamentals, course work progressively ENG 111 Writing and Inquiry 3.0 introduces electronics, 2D Computer Aided Design (CAD), circuit Select one of the following: 3.0 simulation, solid-state fundamentals, digital concepts, instrumentation, C++ programming, microprocessors, programmable Logic Controllers ENG 112 Writing and Research in the Disciplines (PLCs). Other course work includes the study of various fields associated ENG 113 Literature-Based Research with the electrical/electronic industry. -

Electrical and Computer Engineering: Past, Present, and Future
Electrical and Computer Engineering: Past, Present, and Future Randy Berry1, chair, Department of Electrical and Computer Engineering The field of electrical and computer engineering (ECE) has had an enormously successful history. This field has pushed the frontiers of fundamental research, led to the emergence of entirely new disciplines, and revolutionized our daily lives. ECE departments2 are found in nearly every engineering school and have historically been one of the larger departments both in terms of faculty and student enrollments. Academically, a strong ECE department is highly correlated with the reputation of an engineering school. Of the top 10 engineering schools in the latest US News and World Report rankings of graduate programs, nine have top 10 ranked ECE programs. Nevertheless, ECE is a field that finds itself facing challenges. In this paper, we will look to the field’s past issues and note how the field repeatedly reinvented itself to push to new heights. Finally, we argue that the time is ripe for another reinvention and show how aspects of such a reinvention are already emerging. Areas such as machine learning and data science, the Internet of things, and quantum information systems provide promising directions for ECE — and embracing them provides a path to a bright future. The Present Situation In many ways, ECE is a victim of its own successes. Advances such as computer-aided design tools reduce the number of designers needed. The increased integration reflected in Moore’s law means that more functionality can be integrated into a single integrated circuit (IC), replacing the need for engineering to integrate multiple components in custom designs. -
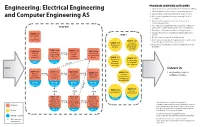
Electrical Engineering and Computer Engineering AS
PROGRAM LEARNING OUTCOMES Engineering: Electrical Engineering 1. Apply analysis tools and computer tools in problem solving. 2. Identify interdisciplinary aspects of engineering projects. 3. Apply software engineering principles and procedures. and Computer Engineering AS 4. Do computer algorithm development using C and C++ techniques. 5. Understand the operation and control of electrical measuring equipment. 6. Use computer programming skills to develop software for REQUIRED automation, decision making and control of equipment. 7. Develop test software for evaluation of digital circuits. ENGIN 110 8. Analyze the operation of small scale digital and analog TAKE 1 circuits. Introduction to 9. Design simple operational amplifier circuits. Engineering ENGTC 126 10. Demonstrate knowledge of magnetism and its applications in the design of transformers and actuators. ENGIN 120 Computer Engineering Aided Design 11. Assemble and test digital and analog circuits from circuit Drawing and Drafting – diagrams. AutoCAD COMSC 165 CHEM 120 COMSC 210 ENGIN 230 Advanced Program General pre req Introduction Programming Design College to Circuits and with C and and Data Chemistry I Devices ENGIN 121 C++ Structures ENGIN 135 Engineering Programming Drawing/ DVC II DVC I.B. for Scientists Descriptive pre req and Engineers Geometry Entry Careers in MATH 192 MATH 193 MATH 292 MATH 294 ENGIN 136 • Engineering design in Analytic pre req Analytic pre req Analytic pre req Differential Computer Geometry Geometry and Geometry and multiple disciplines Equations Programming and Calculus I Calculus II Calculus III for Engineers Using MATLAB* DVC I.B. DVC I.B. DVC I.B. DVC I.B. DVC I.C. DVC I.C. DVC I.C. -
Introduction to Electrical Engineering
Revision: 02/16/01 SUMMER INSTITUTE FOR ENGINEERING AND TECHNOLOGY EDUCATION ELECTRICAL ENGINEERING INTRODUCTION TO ELECTRICAL ENGINEERING CONCEPT This module explains some of the details about the work in which various Electrical Engineering specialties engage. OBJECTIVES 1. To expose the readers to the type of work Electrical Engineers do. 2. To give the readers an idea about the courses the students would require to take to pursue a degree in Electrical Engineering. 3. To explain about the career opportunities for Electrical Engineers. SCIENCE PROCESS SKILLS • Informing • Inquiring • Exploring AAAS SCIENCE BENCHMARKS: • 1B Scientific Inquiry • 12D Communication Skills • 3C Issues of Technology SCIENCE EDUCATION CONTENT STANDARDS (NRC) Grades 5-8: Grades 9-12: • Communications • Technology • Identify disciplines in Electrical Engineering STATE SCIENCE CURRICULUM FRAMEWORKS: Grades 5-8: 1.1.9, 1.1.19, 2.1.8, 2.1.11 Grades 9-12: 1.1.19 The Summer Institute for Engineering and Technology Education, University of Arkansas 1995. All rights reserved. ELECTRICAL ENGINEERING INTRODUCTION 2 INTRODUCTION Electrical Engineering implies electricity, which has flowed into every aspect of our lives. Electricity supplies power to run appliances, heavy machinery, and lights. Electricity also encompasses communications such as the telephone, radio, and television and other consumer electronic devices. And, of course, electronics is changing everything around us every day, through such pervasive devices as hand-held calculators, computers, and controllers that help operate automobiles, airplanes, and homes. Electrical Engineering is the largest engineering profession. HISTORY William Gilbert, an english scientist, characterized magnetism and static electricity around the year 1600, and Alexander Volta discovered that an electric current could be made to flow in 1800. -
Electrical Engineering Curriculum International Overview
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by UPCommons. Portal del coneixement obert de la UPC 2008 Electrical Engineering Curriculum International Overview Josep Miquel Jornet, Eduard Alarcón, Elisa Sayrol International Affairs Office and Dean’s office – Telecom BCN UPC 14/07/2008 2 I. Overview of the Electrical Engineering Curriculum in some of the main universities in North America Massachusetts Institute of Technology http://www.eecs.mit.edu/ug/brief‐guide.html#bach http://www.eecs.mit.edu/ug/primer.html#intro http://www.eecs.mit.edu/ug/programs.html These are the degrees related to Electrical Engineering and Computer Science offered at MIT: Bachelors’ Degrees • Course VI‐1/VI‐1A: A four‐year accredited program leading to the S.B. degree Bachelor of Science in Electrical Science and Engineering. • Course VI‐2/VI‐2A: A four‐year accredited program which permits a broad selection of subjects from electrical engineering and computer science leading to the S.B. degree Bachelor of Science in Electrical Engineering and Computer Science. • Course VI‐3/VI‐3A: A four‐year accredited program leading to the S.B. degree Bachelor of Science in Computer Science and Engineering. Masters’ Degrees • Course VI‐P / VI‐PA: A five‐year program leading to the M.Eng. degree Master of Engineering in Electrical Engineering and Computer Science and simultaneously to one of the three S.B.'s. This degree is available only to M.I.T. EECS undergraduates. It is an integrated undergraduate/graduate professional degree program with subject requirements ensuring breadth and depth. -
Electronics and Electrical Engineering Laboratory
NISTR 7568 Programs, Activities, and Accomplishments March 2009 NISTIR 7568 ELECTRONICS AND ELECTRICAL ENGINEERING LABORATORY U.S. Department of Commerce Gary Locke, Secretary National Institute of Standards and Technology March 2009 Patrick D. Gallagher, Deputy Director INDEX Electronics and Electrical Engineering Laboratory at a Glance . 6 Director’s Message . 7 EEEL Strategic Technical Area: Energy . 8 EEEL Strategic Technical Area: Bioelectronics . 9 EEEL Strategic Technical Area: Nanotechnology. 10 EEEL Strategic Technical Area: Spintronics. 11 EEEL Strategic Technical Area: Homeland Security . 12 Office of Law Enforcement Standards . 14 Office of Microelectronics Programs . 16 Semiconductor Electronics Division . 19 Power Device and Thermal Metrology . 20 Micro-Nano-Technology (MNT) . 22 Nanobiotechnology . 24 CMOS Device and Reliability . 26 Macro Electronics . 28 Nanoelectronic Device Metrology. 30 Infrastructure for Integrated Electronics Design and Manufacturing . 32 Knowledge Facilitation . 34 Optoelectronics Division. 37 Display Metrology . 38 Laser Radiometry. 40 High-Speed Measurements. 42 Fiber Sources and Applications . 44 Quantum Information and Terahertz Technology . 46 Nanostructure Fabrication and Metrology . 48 Semiconductor Growth and Devices. 50 Optical Materials Metrology . 52 Quantum Electrical Metrology Division . 55 Quantum Voltage System Development and Dissemination . 56 Metrology of the Ohm . 58 Quantum Conductance/Graphene-Based Quantum Metrology . 60 AC-DC Difference . 62 Farad and Impedance Metrology . 64 Electronic Kilogram . 66 Electric Power Metrology and the Smart Grid . 68 Quantum Sensors. 70 Quantum Information and Measurements . 72 Quantum Magnetic Sensors and Materials. 74 Electromagnetics Division. 77 This document describes Advanced High Frequency Devices . 78 the technical programs of the Advanced Materials Metrology. 80 Fundamental Guided-Wave Metrology . 82 laboratory. Antenna Metrology. 84 Field Parameter Metrology . -

Electromechanical Dynamics
Electromechanical Dynamics James R. Melcher Herbert H. Woodson MIT OpenCourseWare http://ocw.mit.edu Electromechanical Dynamics For any use or distribution of this textbook, please cite as follows: Woodson, Herbert H., and James R. Melcher. Electromechanical Dynamics. 3 vols. (Massachusetts Institute of Technology: MIT OpenCourseWare). http://ocw.mit.edu (accessed MM DD, YYYY). License: Creative Commons Attribution-NonCommercial-Share Alike For more information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms ELECTROMECHANICAL DYNAMICS Part I: Discrete Systems ELECTROMECHANICAL DYNAMICS Part I: Discrete Systems HERBERT H. WOODSON Philip Sporn Professor of Energy Processing Departments of Electrical and Mechanical Engineering JAMES R. MELCHER Associate Professor of Electrical Engineering Department of Electrical Engineering both of Massachusetts Institute of Technology JOHN WILEY & SONS, INC., NEW YORK - LONDON . SYDNEY __ ~__ To our parents I_ PREFACE Part I: Discrete Systems In the early 1950's the option structure was abandoned and a common core curriculum was instituted for all electrical engineering students at M.I.T. The objective of the core curriculum was then, and is now, to provide a foundation in mathematics and science on which a student can build in his professional growth, regardless of the many opportunities in electrical engineering from which he may choose. In meeting this objective, core curriculum subjects cannot serve the needs of any professional area with respect to nomenclature, techniques, and problems unique to that area. Specialization comes in elective subjects, graduate study, and professional activities. To be effective a core curriculum subject must be broad enough to be germane to the many directions an electrical engineer may go professionally, yet it must have adequate depth to be of lasting value. -

Electrical Engineering Dictionary
ratio of the power per unit solid angle scat- tered in a specific direction of the power unit area in a plane wave incident on the scatterer R from a specified direction. RADHAZ radiation hazards to personnel as defined in ANSI/C95.1-1991 IEEE Stan- RS commonly used symbol for source dard Safety Levels with Respect to Human impedance. Exposure to Radio Frequency Electromag- netic Fields, 3 kHz to 300 GHz. RT commonly used symbol for transfor- mation ratio. radial basis function network a fully R-ALOHA See reservation ALOHA. connected feedforward network with a sin- gle hidden layer of neurons each of which RL Typical symbol for load resistance. computes a nonlinear decreasing function of the distance between its received input and Rabi frequency the characteristic cou- a “center point.” This function is generally pling strength between a near-resonant elec- bell-shaped and has a different center point tromagnetic field and two states of a quan- for each neuron. The center points and the tum mechanical system. For example, the widths of the bell shapes are learned from Rabi frequency of an electric dipole allowed training data. The input weights usually have transition is equal to µE/hbar, where µ is the fixed values and may be prescribed on the electric dipole moment and E is the maxi- basis of prior knowledge. The outputs have mum electric field amplitude. In a strongly linear characteristics, and their weights are driven 2-level system, the Rabi frequency is computed during training. equal to the rate at which population oscil- lates between the ground and excited states. -

Operations Research with Engineering - (2021-2022 Catalog) 1
Operations Research with Engineering - (2021-2022 Catalog) 1 Examples of specialty tracks from various departments across campus Operations Research are given below: with Engineering Energy Systems within Mechanical Engineering Track (12 hours from the course Degrees Offered list below) • Master of Science in Operations Research with Engineering (Non- MEGN461 THERMODYNAMICS II 3.0 Thesis) MEGN567 PRINCIPLES OF BUILDING SCIENCE 3.0 • Doctor of Philosophy in Operations Research with Engineering MEGN583/ ADDITIVE MANUFACTURING 3.0 AMFG501 Program Description MEGN570 ELECTROCHEMICAL SYSTEMS ENGINEERING 3.0 Operations Research (OR) involves mathematically modeling physical MEGN560 DESIGN AND SIMULATION OF THERMAL 3.0 systems (both naturally occurring and man-made) with a view to SYSTEMS determining a course of action for the system to either improve or optimize its functionality. Examples of such systems include, but are not Additive Manufacturing Track (12 hours from limited to, manufacturing systems, chemical processes, socio-economic the course list below)* systems, mechanical systems (e.g., those that produce energy), and mining systems. *Subject to approval by graduate council Program Requirements AMFG511 DATA DRIVEN ADVANCED MANUFACTURING 3.0 MEGN583/ ADDITIVE MANUFACTURING 3.0 Master of Science in Operations Research AMFG501 with Engineering (Non-Thesis) AMFG531 MATERIALS FOR ADDITIVE MANUFACTURING 3.0 Core Courses 18.0 AMFG421/521 DESIGN FOR ADDITIVE MANUFACTURING 3.0 ORWE courses not taken as core courses 12.0 Applied Mathematics and Statistics Track (12 Total 30.0 hours from the course list below) All Masters students are required to take a set of core courses (18 hours) MATH500 LINEAR VECTOR SPACES 3.0 that provides basic tools for the more advanced and specialized courses MATH532 SPATIAL STATISTICS 3.0 in the program as specified below. -

Electrical and Computer Engineering 1
Electrical and Computer Engineering 1 ECE 407. Pattern Recognition I. 3 or 4 hours. Electrical and Computer The design of automated systems for detection, recognition, classification and diagnosis. Parametric and nonparametric decision-making Engineering techniques. Applications in computerized medical and industrial image and waveform analysis. Course Information: Same as BIOE 407. 3 undergraduate hours. 4 graduate hours. Prerequisite(s): ECE 341 or Contact Information: BIOE 339 or IE 342 or STAT 381. http:// ECE 410. Advanced Circuit Analysis. 3 or 4 hours. Mailing Address: Matrix algebra for network analysis, network parameters, macromodeling, Department of Electrical and Computer Engineering (MC 154) high-frequency measurements, network functions and theorems. Topics 851 South Morgan Street in computer-aided analysis. Course Information: 3 undergraduate hours. Chicago, IL 60607-7053 4 graduate hours. Prerequisite(s): MATH 310 and grade of C or better in ECE 310. Contact Information: Department Office: 1020 SEO Student Affairs Office: 1020 SEO ECE 412. Introduction to Filter Synthesis. 3 or 4 hours. (312) 413-2291 or (312) 996-4325 Fundamentals of network synthesis, filter approximations and frequency [email protected] transformations. Active filter synthesis using bi-linear and bi-quad circuits. www.ece.uic.edu Topics in computer-aided design. Course Information: 3 undergraduate hours. 4 graduate hours. Prerequisite(s): Grade of C or better in ECE Administration: 310. Interim Department Head: Daniela Tuninetti ECE 415. Image Analysis and Computer Vision I. 3 or 4 hours. Director of Graduate Studies: Danilo Erricolo Image formation, geometry and stereo. Two-dimensional image Program Codes: analysis by fourier and other 2-D transforms. -

Electrical Engineering Mechanical Engineering Software Engineering
Electrical Engineering At K&S, our electrical engineers design a wide range of electronic hardware and servo motion control systems using state-of-the-art CAD, modeling and analysis tools. Our electrical engineers are continually improving capability and performance while reducing system cost. K&S Electrical Engineering would like you to know: • We use direct application of theoretical knowledge to design the world’s most sophisticated semiconductor equipment • We use modeling to understand what is happening in the physical world • You will acquire hands-on experience with the most challenging and complex technologies in the industry • You will work with and be coached by the top talents in the semiconductor industry to develop your potential • You will see the fruits of your labor; developing a product in its entirety and witnessing its impact on the society Mechanical Engineering At K&S, our mechanical engineers perform engineering design and analysis for research and development of state-of-the-art semiconductor assembly equipment. Additionally, our mechanical engineers have the opportunity to support our current products that are in operation at semiconductor manufacturers and their subcontractors worldwide. K&S Mechanical Engineering would like you to know: • We develop highly complex machines requiring some of the highest performing mechanisms in the world. Our applications demand operating at very high speeds while also requiring sub-micron accuracy • We are involved in all phases of product development, from initial concept through detailed design, final verification and test • We seek engineers who are creative, hands-on and enjoy solving complex technical challenges Software Engineering At K&S, our software engineers design and implement software that controls high-speed and extremely accurate semiconductor assembly equipment like wire bonders and advanced packaging bonders.