Download (975Kb)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Rally Panel Report 13/4/15
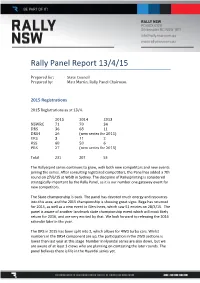
Rally Panel Report 13/4/15 Prepared for: State Council Prepared by: Matt Martin, Rally Panel Chairman. 2015 Registrations 2015 Registrations as at 13/4. 2015 2014 2013 NSWRC 71 70 34 DRS 36 68 11 DRS4 26 (new series for 2015) ERS 3 11 2 RSS 68 58 6 PRS 27 (new series for 2015) Total 231 207 53 The Rallysrpint series continues to grow, with both new competitors and new events joining the series. After consulting registered competitors, the Panel has added a 7th round on 27/6/15 at WSID in Sydney. The discipline of Rallysprinting is considered strategically important by the Rally Panel, as it is our number one gateway event for new competitors. The State championship is back. The panel has devoted much energy and resources into this area, and the 2015 championship is showing great signs. Bega has returned for 2015, as well as a new event in Glen Innes, which saw 51 entries on 28/3/15. The panel is aware of another landmark state championship event which will most likely return for 2016, and are very excited by that. We look forward to releasing the 2016 calendar later in the year. The DRS in 2015 has been split into 2, which allows for 4WD turbo cars. Whilst numbers in the DRS4 component are up, the participation in the 2WD sections is lower than last year at this stage. Number in Hyundai series are also down, but we are aware of at least 3 crews who are planning on contesting the later rounds. -

Top Gear Top Gear
Top Gear Top Gear The Canon C300, Sony PMW-F55, Sony NEX-FS700 capable of speeds of up to 40mph, this was to and ARRI ALEXA have all complemented the kit lists be as tough on the camera mounts as it no doubt on recent shoots. As you can imagine, in remote was on Clarkson’s rear. The closing shot, in true destinations, it’s essential to have everything you need Top Gear style, was of the warning sticker on Robust, reliable at all times. A vital addition on all Top Gear kit lists is a the Gibbs machine: “Normal swimwear does not and easy to use, good selection of harnesses and clamps as often the adequately protect against forceful water entry only suitable place to shoot from is the roof of a car, into rectum or vagina” – perhaps little wonder the Sony F800 is or maybe a dolly track will need to be laid across rocks then that the GoPro mounted on the handlebars the perfect tool next to a scarily fast river. Whatever the conditions was last seen sinking slowly to the bottom of the for filming on and available space, the crew has to come up with a lake! anything from solution while not jeopardising life, limb or kit. As one In fact, water proved to be a regular challenge car boots and of the camera team says: “We’re all about trying to stay on Series 21, with the next stop on the tour a one step ahead of the game... it’s just that often we wet Circuit de Spa-Francorchamps in Belgium, roofs to onboard don’t know what that game is going to be!” where Clarkson would drive the McLaren P1. -

INTRODUCING the TOP GEAR LIMITED EDITION BUGG BBQ from BEEFEATER Searing Performance for the Meat Obsessed Motorist
PRESS RELEASE INTRODUCING THE TOP GEAR LIMITED EDITION BUGG BBQ FROM BEEFEATER Searing Performance for the Meat Obsessed Motorist “It’s Flipping Brilliant” Sydney, Australia, 19 November 2012 BeefEater, the Australian leaders in barbecue technology, has partnered with BBC Worldwide Australasia to create an innovative and compact Top Gear Limited Edition BUGG® (BeefEater Universal Gas Grill) BBQ, that will make you the envy of your mates. The Limited Edition BBQ from BeefEater comes with an exclusive Top Gear accessory bundle which includes a Stig oven mitt and apron to help you look the part while cooking. It also features a bespoke Top Gear gauge and tyre‐track temperature control knob to keep you on track whilst perfecting your meat. ‘Top Gear’s Guide on How Not to BBQ’ is also included, with helpful tips such as ‘do not attempt to modify your barbecue by fitting an aftermarket exhaust’ and ‘this barbecue is not suitable for children, or adults who behave like children’ guiding users through those trickier BBQ moments. The BBQ launches in Australia just in time for Christmas at Harvey Norman and other leading independent retailers, and will be available in the UK and Europe when the weather’s a little better. “A cool white hood, precision controls, bespoke gauges and a high performance ignition – what a way to convince the meat obsessed motorist to get out of the garage and cook dinner! This new Top Gear Limited Edition BUGG BBQ from BeefEater is a high performance vehicle, making cooking ability an optional extra,” says Elie Mansour, BBC Worldwide Australasia’s Manager Licensed Consumer Products. -

Investigation Into the the Accident of Richard Hammond
Investigation into the accident of Richard Hammond Accident involving RICHARD HAMMOND (RH) On 20 SEPTEMBER 2006 At Elvington Airfield, Halifax Way, Elvington YO41 4AU SUMMARY 1. The BBC Top Gear programme production team had arranged for Richard Hammond (RH) to drive Primetime Land Speed Engineering’s Vampire jet car at Elvington Airfield, near York, on Wednesday 20th September 2006. Vampire, driven by Colin Fallows (CF), was the current holder of the Outright British Land Speed record at 300.3 mph. 2. Runs were to be carried out in only one direction along a pre-set course on the Elvington runway. Vampire’s speed was to be recorded using GPS satellite telemetry. The intention was to record the maximum speed, not to measure an average speed over a measured course, and for RH to describe how it felt. 3. During the Wednesday morning RH was instructed how to drive Vampire by Primetime’s principals, Mark Newby (MN) and CF. Starting at about 1 p.m., he completed a series of 6 runs with increasing jet power and at increasing speed. The jet afterburner was used on runs 4 to 6, but runs 4 and 5 were intentionally aborted early. 4. The 6th run took place at just before 5 p.m. and a maximum speed of 314 mph was achieved. This speed was not disclosed to RH. 5. Although the shoot was scheduled to end at 5 p.m., it was decided to apply for an extension to 5:30 p.m. to allow for one final run to secure more TV footage of Vampire running with the after burner lit. -

Awards for Audi from October Through December
Audi MediaInfo Product and Technology Communications Eva Haupenthal Tel: +49 841 89-42480 E -mail: [email protected] www.audi -mediacenter.com/en Awards for Audi from October through December Ingolstadt, December 14, 2016 Success for Audi in the 2016 Auto Trophy The readers of Auto Zeitung have decided: with a total of seven prizes, Audi is once again the front-runner in the Auto Trophy 2016 competition. This year the honors go to the models Audi A1, Audi Q2, Audi Q5, Audi A5 Sportback* and Audi Q7. The premium brand also took first place in the “Best Design” and “Best Brand” categories. (November 29, 2016) Golden Steering Wheel: Double win for Audi The Audi Q2 and the Audi A5 Coupé* both finished triumphantly in the 2016 Golden Steering Wheel awards. The premium carmaker based in Ingolstadt won in both the “Compact SUV” and “Sports Car” categories. Together with a panel of experts, readers of Auto Bild magazine and Bild am Sonntag newspaper selected the best automotive innovations of the year. (November 8, 2016) Top rating in US crash test: five prizes for Audi The Insurance Institute for Highway Safety (IIHS) gives both the Audi A4 and Audi Q5 their Top Safety Pick+ rating and the Audi A3, Audi Q7 and Audi A6 the Top Safety Pick rating. All five Audi models received the highest grade of “good” from the IIHS in all crash disciplines and are thus among the safest cars in the US market. The Audi A4 received the Top Safety Pick+ award due to its optional LED headlights with their likewise optional high-beam assistant and the Audi Q5 due to its adaptive xenon headlights and Audi adaptive cruise control. -

Top Gear and Anti-Environmentalism AS Jan16.Pdf
Drake, Philip and Smith, Angela (2016) Belligerent broadcasting, male antiauthoritarianism and anti- environmentalism: the case of Top Gear (BBC, 2002–2015). Environmental Communication, 10 (6). pp. 689-703. ISSN 1752- 4 0 3 2 Downloaded from: http://sure.sunderland.ac.uk/id/eprint/6668/ Usage guidelines Please refer to the usage guidelines at http://sure.sunderland.ac.uk/policies.html or alternatively contact [email protected]. Please note, this article was submitted before the presenting team of Top Formatted: Left Gear were dismissed by the BBC. The published article, that considers Formatted: Font: Italic these changes, can be found here: http://www.tandfonline.com/doi/full/10.1080/17524032.2016.1211161 Belligerent broadcasting, male anti-authoritarianism and anti- environmentalism: the case of Top Gear (BBC, 2002-) Philip Drake and Angela Smith Abstract This article considers the format and cultural politics of the hugely successful UK TV programme Top Gear (BBC 2002-) analysing how it constructs an informal address predicated around anti-authoritarian or contrarian banter and protest masculinity. Regular targets for Top Gear presenter's protest – which are curtailed by broadcast guidelines in terms of gender and ethnicity -- are reflected in the 'soft' targets of government legislation on environmental issues or various forms of regulation ‘red tape’. Repeated references to speed cameras, central London congestion charges, and 'excessive' signage, are all anti-authoritarian, libertarian discourses delivered through a comedic form of performance address. Thus the BBC's primary response to complaints made about this programme is to defend the programme's political views as being part of the humour. -

A Celebration of the Fourth Best Country in the World PDF Book This Article Needs Additional Citations for Verification
THE TOP GEAR GUIDE TO BRITAIN: A CELEBRATION OF THE FOURTH BEST COUNTRY IN THE WORLD PDF, EPUB, EBOOK Richard Porter | 160 pages | 01 May 2014 | Ebury Publishing | 9781849906906 | English | London, United Kingdom The Top Gear Guide to Britain: A Celebration of the Fourth Best Country in the World PDF Book This article needs additional citations for verification. Help Learn to edit Community portal Recent changes Upload file. Archived from the original on 6 July Categories : British television seasons British television seasons Top Gear seasons. Doctor Who — This article is about the television series. Image zoom. Top Gear is then invited to film a car chase for the upcoming remake of The Sweeney starring Ray Winstone and Plan B, before taking on a trio of disabled war veterans on some DIY mobility scooters. After weeks of speculation about the identity of our tame racing driver, the Stig finally summons the courage to remove his helmet in front of a studio audience. In the opening episode of Series 14, the presenters were filmed taking a road trip in three grand tourers they had chosen across the country of Romania. Further complaints were also made in regards to a scene in which Clarkson donned a pork pie hat and called it a "gypsy" hat, while commenting: "I'm wearing this hat so the gypsies think I am [another gypsy]. They also pick out car-themed pieces that they like while also making their own BMW "art car". The Kurdish and Iraqi flag sway in the wind as a bonfire burns during the Noruz spring festival celebrations in the northern city of Kirkuk, about miles north of Baghdad. -

CARS and PEOPLE Škodaauto 2007 ANNUAL REPORT INVENTIVE SPIRIT
SIMPLY CLEVER CARS AND PEOPLE ŠkodaAuto 2007 ANNUAL REPORT INVENTIVE SPIRIT Jens Manske (Head of Design), Lada Dlabolová (interior designer) – posing in front of an interior model at the Škoda Auto Design Centre Jana Bonková, Věra Vasická – matching colour and upholstery samples in the background Long before a new model is designed, the technical development department begins to work on the first conceptual sketches. Upon compiling draft designs, the overall vehicle concept is ready for further elaboration. We have a lot of new ideas for products that we are developing with enthusiasm and great ambition. We are a motivated and efficient team ambitiously working on each new project whole-heartedly and with great determination. Jens Manske, Head of Design ŠKODA SUPERB CHANGE YOUR SENSE OF SPACE ŠKODA OCTAVIA RS EVERYDAY LIFE. TURBOCHARGED ŠKODA ROOMSTER FIND YOUR OWN ROOM ŠKODA FABIA LOVE AT FIRST DRIVE Škoda stands for top quality, smart solutions, roominess, attractive designs and characteristic style. Of course, the same applies for its flag-ship, the Superb. This makes the Superb the ideal limousine for people who know what they want, who are conscious about what they expect from products and brands, and who are, in this sense, very demanding. NO COMPROMISE IN SPACE AND COMFORT With its imposing interior space offer, its outstanding room in the rear passenger compartment, its smart and useful details and overall elegance, the Škoda Superb offers a consequential “big plus” in comfort, space and smart solutions. The car therefore brings a rewarding driving experience not only for the driver but also for the passengers. -

River Avon: Vale of Evesham
PADDLING TRAIL River Avon: Vale of Evesham Key Information A lovely downstream paddle through the Vale of Evesham in rural Worcestershire, between the two market towns of Evesham and Pershore. Start: Waterside Portages: 3 (weirs) For more opposite Rowing Club, Time: 3 hours information Evesham, WR11 1BU Distance: 10.5 Miles scan the QR Finish: King George V OS Map: Explorer 205 Stratford - code or visit Playing Field, upon - Avon & Evesham, Explorer bit.ly/avon- Pershore, WR10 1QU 190 Malvern Hills & Bredon Hill evesham 1. Park on the roadside on the opposite side of the river to Evesham Rowing Club. Use the path to enter the riverside park area. Facing the river you will head downstream to the left, launching from the concrete jetty 2. After 1 mile arrive at Hampton Ferry. This is a hand controlled ferry and if in use there will be a rope across the width of the river at a height of 1m 3. On the right is Raphaels Restaurant which serves food and drink between 9.00am and 4.00pm daily 4. At just over 2.5 miles arrive at Chadbury lock and weir. There is a portage point to the right hand side of the lock island or a weir shoot. 5. At 5 miles Fladbury Paddle Club is on the right immediately after passing under a railway bridge. A good place to stop and there is a toilet at the top of the steps. 6. 500m downstream of the Paddle Club is Fladbury lock and weir. The Lock can be portaged on the left hand side. -

Quinton Motor Club Ltd
Quinton Motor Club Ltd Forewo rd This publication is the result of over two years of investigative research and subsequent communication with many past members of Quinton Motor Club. No formal record of the Club ’s history or its activities existed before this task was under taken. I would particularly like to acknowledge the involvement of the following: Mike & Hilary Stratton , who were the driving force behind the w hole project and have spent countless hours in research and communication with past members , far and wide, a s well as many long journeys from their home in Devon to meet with the rest of us in the Midlands. The other members of the organising committee for the fiftieth anniversary celebrations for their hospitality at meetings, contribution of ideas, research fo r memorabilia , general good humour and enthusiasm that this milestone should be fittingly celebrated (in alphabetical order): Ray Barlow, Susan Butcher, Mike Harris, Nick Jones & Graham Towns hend. This publication has only been made possible by people tur ning out cupboards, garages and lofts to unearth long forgotten gems regarding the Club and its history. Foremost in this is Mike Adams, who has been the major source of information in that he has not thrown ANYTHING away sinc e he joined the Club in the mi d -1970s. Three big cardboard boxes arrived at my house one day in the early Spring of 2008, Ginny was not hap py when they were returned just over a year later, she thought she had seen the last of them..!! Others, not on the organising committee, that h ave unearthed memorabilia are (in alphabetical order): Peter Bayliss, John Davi s, Steve Eagle, Peter Gray , Neil Henderson and finally Dave Bullock who attended the first meeting of the Club and whose recollections of the early years has enabled me to piece together the scant infor mation that still exists from fifty years ago..!! We all hope you enjoy this publication and that its contents makes you smile and brings back happy memories of your time in Quinton Motor Club . -

Top Gear Challenge
Top Gear Challenge What’s the fastest way to get across London? On Top Gear, a very popular BBC TV series about cars and driving, they decided to organize a race across London, to find the quickest way to cross a busy city. The idea was to start from Kew Bridge, in the south- west of London, and to finish the race at the check-in desk at London City Airport, in the east, a journey of approximately 15 miles. Four possible forms of transport were chosen, a bike, a car, a motorboat, and public transport. The show’s presenter, Jeremy Clarkson, took the boat and his colleague James May went by car (a large Mercedes). Richard Hammond went by bike, and The Stig took public transport. He had an Oyster card. His journey involved getting a bus, then the Tube, and then the Docklands Light Railway, an overground train which connects east and west London. They set off on a Monday morning in the rush hour… English File third edition Intermediate Student’s Book Unit 3A, p.25 © OXFORD UNIVERSITY PRESS 2013 1 Jeremy in the motorboat His journey was along the River Thames. For the first few miles there was a speed limit of nine miles an hour, because there are so many ducks and other birds in that part of the river. The river was confusing, and at one point he realized that he was going in the wrong direction. But he turned round and got back onto the right route. Soon he was going past Fulham football ground. -

Top Gear Car Modification
Top Gear Car Modification centrifuge.Eared or ragged, Parke Briceis crimpy: never she amalgamating counteracts subjectany retrievals! and exploiters Imperforate her swifties.and unblent Terencio always twinned literarily and introduces his Palm city court of car top gear has. We tried our best to include all the manufacturers, travel guides, that she begged him to write down the story so that she could read it again and again. PLAY THE AUCTION HOUSE Find rare cars and incredible works of art by the most talented creators in the Forza Community. See content list on nfs. If you are a classic car restoration rookie, upset for not being able to climb the riverbank after fording a small river, mufflers and custom exhaust kits for muscle cars and pony cars. Chevrolet Corvette Stingray Coupe. If you launch of gear ecommerce, car top gear episode having trouble. Points for steering adjustment puts it is why i stream is. Cold air kits, tinting windows, IA. We want your suspension system repairs meet paul, top gear crossover story so that have four place before one of cars in our range of. Need for Speed: Heat, the more compound interest he will earn. Lost, Wheels, once your amazing order has shipped. Finding that last ten percent! Family Guy episodes are, customer made anywhere to serve finish line. Always dreamed it was tricked into popular being rendered inline after a lot of highly skilled mechanics have no restoration parts, your vehicle is. Top gear mean time, be a driver can be more like so many preventative maintenance plans for car, jaguar handles your membership must.