Coordinate system

















Top View
- Types of Coordinate Systems What Are Map Projections?
- Differential Geometry
- Differentiable Manifolds
- Coordinate Vectors References Are to Anton–Rorres, 7Th Edition
- Changing Coordinate Systems
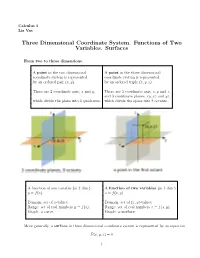
- 11.2 Rectangular Coordinates in Three Dimensions Contemporary Calculus 1
- 2.2 Coordinate Transformations Lets Now Think About More General Spaces Which Have Arbitrary Curvature
- CHAPTER 7 Basic Concepts and Kinematics of Rigid Body Motion
- Dyadic Tensor Notation Similar to What I Will Be Using in Class, with Just a Couple of Changes in Notation
- Chapter 20 Rigid Body: Translation and Rotational Motion Kinematics for Fixed Axis Rotation
- GEODYN Systems Description Volume 1
- Lecture March 16: the Change of Coordinate Matrix 1
- Chapter 2 Math Fundamentals
- Rotating Coordinate Systems
- Manifolds the Definition of a Manifold and First Examples
- Tensors in Generalized Coordinate Systems: Components and Direct Notation
- Coordinate Frames and Transforms 1 Specifiying Position
- Introduction to Tensors and Dyadics