Scheduling: Introduction
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Stclang: State Thread Composition As a Foundation for Monadic Dataflow Parallelism Sebastian Ertel∗ Justus Adam Norman A
STCLang: State Thread Composition as a Foundation for Monadic Dataflow Parallelism Sebastian Ertel∗ Justus Adam Norman A. Rink Dresden Research Lab Chair for Compiler Construction Chair for Compiler Construction Huawei Technologies Technische Universität Dresden Technische Universität Dresden Dresden, Germany Dresden, Germany Dresden, Germany [email protected] [email protected] [email protected] Andrés Goens Jeronimo Castrillon Chair for Compiler Construction Chair for Compiler Construction Technische Universität Dresden Technische Universität Dresden Dresden, Germany Dresden, Germany [email protected] [email protected] Abstract using monad-par and LVars to expose parallelism explicitly Dataflow execution models are used to build highly scalable and reach the same level of performance, showing that our parallel systems. A programming model that targets parallel programming model successfully extracts parallelism that dataflow execution must answer the following question: How is present in an algorithm. Further evaluation shows that can parallelism between two dependent nodes in a dataflow smap is expressive enough to implement parallel reductions graph be exploited? This is difficult when the dataflow lan- and our programming model resolves short-comings of the guage or programming model is implemented by a monad, stream-based programming model for current state-of-the- as is common in the functional community, since express- art big data processing systems. ing dependence between nodes by a monadic bind suggests CCS Concepts • Software and its engineering → Func- sequential execution. Even in monadic constructs that explic- tional languages. itly separate state from computation, problems arise due to the need to reason about opaquely defined state. -
Division 01 – General Requirements Section 01 32 16 – Construction Progress Schedule
DIVISION 01 – GENERAL REQUIREMENTS SECTION 01 32 16 – CONSTRUCTION PROGRESS SCHEDULE DIVISION 01 – GENERAL REQUIREMENTS SECTION 01 32 16 – CONSTRUCTION PROGRESS SCHEDULE PART 1 – GENERAL 1.01 SECTION INCLUDES A. This Section includes administrative and procedural requirements for the preparation, submittal, and maintenance of the progress schedule, reporting progress of the Work, and Contract Time adjustments, including the following: 1. Format. 2. Content. 3. Revisions to schedules. 4. Submittals. 5. Distribution. B. Refer to the General Conditions and the Agreement for definitions and specific dates of Contract Time. C. The above listed Project schedules shall be used for evaluating all issues related to time for this Contract. The Project schedules shall be updated in accordance with the requirements of this Section to reflect the actual progress of the Work and the Contractor’s current plan for the timely completion of the Work. The Project schedules shall be used by the Owner and Contractor for the following purposes as well as any other purpose where the issue of time is relevant: 1. To communicate to the Owner the Contractor’s current plan for carrying out the Work; 2. To identify work paths that is critical to the timely completion of the Work; 3. To identify upcoming activities on the Critical Path(s); 4. To evaluate the best course of action for mitigating the impact of unforeseen events; 5. As the basis for analyzing the time impact of changes in the Work; 6. As a reference in determining the cost associated with increases or decreases in the Work; 7. To identify when submittals will be submitted; 8. -

Operating System Support for Parallel Processes
Operating System Support for Parallel Processes Barret Rhoden Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2014-223 http://www.eecs.berkeley.edu/Pubs/TechRpts/2014/EECS-2014-223.html December 18, 2014 Copyright © 2014, by the author(s). All rights reserved. Permission to make digital or hard copies of all or part of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. To copy otherwise, to republish, to post on servers or to redistribute to lists, requires prior specific permission. Operating System Support for Parallel Processes by Barret Joseph Rhoden A dissertation submitted in partial satisfaction of the requirements for the degree of Doctor of Philosophy in Computer Science in the Graduate Division of the University of California, Berkeley Committee in charge: Professor Eric Brewer, Chair Professor Krste Asanovi´c Professor David Culler Professor John Chuang Fall 2014 Operating System Support for Parallel Processes Copyright 2014 by Barret Joseph Rhoden 1 Abstract Operating System Support for Parallel Processes by Barret Joseph Rhoden Doctor of Philosophy in Computer Science University of California, Berkeley Professor Eric Brewer, Chair High-performance, parallel programs want uninterrupted access to physical resources. This characterization is true not only for traditional scientific computing, but also for high- priority data center applications that run on parallel processors. These applications require high, predictable performance and low latency, and they are important enough to warrant engineering effort at all levels of the software stack. -

APPLYING MODEL-VIEW-CONTROLLER (MVC) in DESIGN and DEVELOPMENT of INFORMATION SYSTEMS an Example of Smart Assistive Script Breakdown in an E-Business Application
APPLYING MODEL-VIEW-CONTROLLER (MVC) IN DESIGN AND DEVELOPMENT OF INFORMATION SYSTEMS An Example of Smart Assistive Script Breakdown in an e-Business Application Andreas Holzinger, Karl Heinz Struggl Institute of Information Systems and Computer Media (IICM), TU Graz, Graz, Austria Matjaž Debevc Faculty of Electrical Engineering and Computer Science, University of Maribor, Maribor, Slovenia Keywords: Information Systems, Software Design Patterns, Model-view-controller (MVC), Script Breakdown, Film Production. Abstract: Information systems are supporting professionals in all areas of e-Business. In this paper we concentrate on our experiences in the design and development of information systems for the use in film production processes. Professionals working in this area are neither computer experts, nor interested in spending much time for information systems. Consequently, to provide a useful, useable and enjoyable application the system must be extremely suited to the requirements and demands of those professionals. One of the most important tasks at the beginning of a film production is to break down the movie script into its elements and aspects, and create a solid estimate of production costs based on the resulting breakdown data. Several film production software applications provide interfaces to support this task. However, most attempts suffer from numerous usability deficiencies. As a result, many film producers still use script printouts and textmarkers to highlight script elements, and transfer the data manually into their film management software. This paper presents a novel approach for unobtrusive and efficient script breakdown using a new way of breaking down text into its relevant elements. We demonstrate how the implementation of this interface benefits from employing the Model-View-Controller (MVC) as underlying software design paradigm in terms of both software development confidence and user satisfaction. -

By Philip I. Thomas
Washington University in St. Louis Scheduling Algorithm with Optimization of Employee Satisfaction by Philip I. Thomas Senior Design Project http : ==students:cec:wustl:edu= ∼ pit1= Advised By Associate Professor Heinz Schaettler Department of Electrical and Systems Engineering May 2013 Abstract An algorithm for weekly workforce scheduling with 4-hour discrete resolution that optimizes for employee satisfaction is formulated. Parameters of employee avail- ability, employee preference, required employees per shift, and employee weekly hours are considered in a binary integer programming model designed for auto- mated schedule generation. Contents Abstracti 1 Introduction and Background1 1.1 Background...............................1 1.2 Existing Models.............................2 1.3 Motivating Example..........................2 1.4 Problem Statement...........................3 2 Approach4 2.1 Proposed Model.............................4 2.2 Project Goals..............................4 2.3 Model Design..............................5 2.4 Implementation.............................6 2.5 Usage..................................6 3 Model8 3.0.1 Indices..............................8 3.0.2 Parameters...........................8 3.0.3 Decision Variable........................8 3.1 Constraints...............................9 3.2 Employee Shift Weighting.......................9 3.3 Objective Function........................... 11 4 Implementation and Results 12 4.1 Constraints............................... 12 4.2 Excel Implementation......................... -

Sched-ITS: an Interactive Tutoring System to Teach CPU Scheduling Concepts in an Operating Systems Course
Wright State University CORE Scholar Browse all Theses and Dissertations Theses and Dissertations 2017 Sched-ITS: An Interactive Tutoring System to Teach CPU Scheduling Concepts in an Operating Systems Course Bharath Kumar Koya Wright State University Follow this and additional works at: https://corescholar.libraries.wright.edu/etd_all Part of the Computer Engineering Commons, and the Computer Sciences Commons Repository Citation Koya, Bharath Kumar, "Sched-ITS: An Interactive Tutoring System to Teach CPU Scheduling Concepts in an Operating Systems Course" (2017). Browse all Theses and Dissertations. 1745. https://corescholar.libraries.wright.edu/etd_all/1745 This Thesis is brought to you for free and open access by the Theses and Dissertations at CORE Scholar. It has been accepted for inclusion in Browse all Theses and Dissertations by an authorized administrator of CORE Scholar. For more information, please contact [email protected]. SCHED – ITS: AN INTERACTIVE TUTORING SYSTEM TO TEACH CPU SCHEDULING CONCEPTS IN AN OPERATING SYSTEMS COURSE A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science By BHARATH KUMAR KOYA B.E, Andhra University, India, 2015 2017 Wright State University WRIGHT STATE UNIVERSITY GRADUATE SCHOOL April 24, 2017 I HEREBY RECOMMEND THAT THE THESIS PREPARED UNDER MY SUPERVISION BY Bharath Kumar Koya ENTITLED SCHED-ITS: An Interactive Tutoring System to Teach CPU Scheduling Concepts in an Operating System Course BE ACCEPTED IN PARTIAL FULFILLMENT OF THE REQIREMENTS FOR THE DEGREE OF Master of Science. _____________________________________ Adam R. Bryant, Ph.D. Thesis Director _____________________________________ Mateen M. Rizki, Ph.D. Chair, Department of Computer Science and Engineering Committee on Final Examination _____________________________________ Adam R. -

Overview of Project Scheduling Following the Definition of Project Activities, the Activities Are Associated with Time to Create a Project Schedule
Project Management Planning Development of a Project Schedule Initial Release 1.0 Date: January 1997 Overview of Project Scheduling Following the definition of project activities, the activities are associated with time to create a project schedule. The project schedule provides a graphical representation of predicted tasks, milestones, dependencies, resource requirements, task duration, and deadlines. The project’s master schedule interrelates all tasks on a common time scale. The project schedule should be detailed enough to show each WBS task to be performed, the name of the person responsible for completing the task, the start and end date of each task, and the expected duration of the task. Like the development of each of the project plan components, developing a schedule is an iterative process. Milestones may suggest additional tasks, tasks may require additional resources, and task completion may be measured by additional milestones. For large, complex projects, detailed sub-schedules may be required to show an adequate level of detail for each task. During the life of the project, actual progress is frequently compared with the original schedule. This allows for evaluation of development activities. The accuracy of the planning process can also be assessed. Basic efforts associated with developing a project schedule include the following: • Define the type of schedule • Define precise and measurable milestones • Estimate task duration • Define priorities • Define the critical path • Document assumptions • Identify risks • Review results Define the Type of Schedule The type of schedule associated with a project relates to the complexity of the implementation. For large, complex projects with a multitude of interrelated tasks, a PERT chart (or activity network) may be used. -
Real-Time Scheduling (Part 1) (Working Draft)
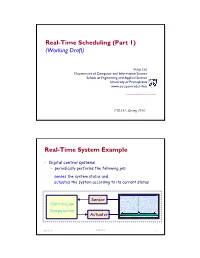
Real-Time Scheduling (Part 1) (Working Draft) Insup Lee Department of Computer and Information Science School of Engineering and Applied Science University of Pennsylvania www.cis.upenn.edu/~lee/ CIS 541, Spring 2010 Real-Time System Example • Digital control systems – periodically performs the following job: senses the system status and actuates the system according to its current status Sensor Control-Law Computation Actuator Spring ‘10 CIS 541 2 Real-Time System Example • Multimedia applications – periodically performs the following job: reads, decompresses, and displays video and audio streams Multimedia Spring ‘10 CIS 541 3 Scheduling Framework Example Digital Controller Multimedia OS Scheduler CPU Spring ‘10 CIS 541 4 Fundamental Real-Time Issue • To specify the timing constraints of real-time systems • To achieve predictability on satisfying their timing constraints, possibly, with the existence of other real-time systems Spring ‘10 CIS 541 5 Real-Time Spectrum No RT Soft RT Hard RT Computer User Internet Cruise Tele Flight Electronic simulation interface video, audio control communication control engine Spring ‘10 CIS 541 6 Real-Time Workload . Job (unit of work) o a computation, a file read, a message transmission, etc . Attributes o Resources required to make progress o Timing parameters Absolute Released Execution time deadline Relative deadline Spring ‘10 CIS 541 7 Real-Time Task . Task : a sequence of similar jobs o Periodic task (p,e) Its jobs repeat regularly Period p = inter-release time (0 < p) Execution time e = maximum execution time (0 < e < p) Utilization U = e/p 0 5 10 15 Spring ‘10 CIS 541 8 Schedulability . Property indicating whether a real-time system (a set of real-time tasks) can meet their deadlines (4,1) (5,2) (7,2) Spring ‘10 CIS 541 9 Real-Time Scheduling . -

Process Scheduling
PROCESS SCHEDULING ANIRUDH JAYAKUMAR LAST TIME • Build a customized Linux Kernel from source • System call implementation • Interrupts and Interrupt Handlers TODAY’S SESSION • Process Management • Process Scheduling PROCESSES • “ a program in execution” • An active program with related resources (instructions and data) • Short lived ( “pwd” executed from terminal) or long-lived (SSH service running as a background process) • A.K.A tasks – the kernel’s point of view • Fundamental abstraction in Unix THREADS • Objects of activity within the process • One or more threads within a process • Asynchronous execution • Each thread includes a unique PC, process stack, and set of processor registers • Kernel schedules individual threads, not processes • tasks are Linux threads (a.k.a kernel threads) TASK REPRESENTATION • The kernel maintains info about each process in a process descriptor, of type task_struct • See include/linux/sched.h • Each task descriptor contains info such as run-state of process, address space, list of open files, process priority etc • The kernel stores the list of processes in a circular doubly linked list called the task list. TASK LIST • struct list_head tasks; • init the "mother of all processes” – statically allocated • extern struct task_struct init_task; • for_each_process() - iterates over the entire task list • next_task() - returns the next task in the list PROCESS STATE • TASK_RUNNING: running or on a run-queue waiting to run • TASK_INTERRUPTIBLE: sleeping, waiting for some event to happen; awakes prematurely if it receives a signal • TASK_UNINTERRUPTIBLE: identical to TASK_INTERRUPTIBLE except it ignores signals • TASK_ZOMBIE: The task has terminated, but its parent has not yet issued a wait4(). The task's process descriptor must remain in case the parent wants to access it. -
Planning and Scheduling in Supply Chains: an Overview of Issues in Practice
PRODUCTION AND OPERATIONS MANAGEMENT POMS Vol. 13, No. 1, Spring 2004, pp. 77–92 issn 1059-1478 ͉ 04 ͉ 1301 ͉ 077$1.25 © 2004 Production and Operations Management Society Planning and Scheduling in Supply Chains: An Overview of Issues in Practice Stephan Kreipl • Michael Pinedo SAP Germany AG & Co.KG, Neurottstrasse 15a, 69190 Walldorf, Germany Stern School of Business, New York University, 40 West Fourth Street, New York, New York 10012 his paper gives an overview of the theory and practice of planning and scheduling in supply chains. TIt first gives an overview of the various planning and scheduling models that have been studied in the literature, including lot sizing models and machine scheduling models. It subsequently categorizes the various industrial sectors in which planning and scheduling in the supply chains are important; these industries include continuous manufacturing as well as discrete manufacturing. We then describe how planning and scheduling models can be used in the design and the development of decision support systems for planning and scheduling in supply chains and discuss in detail the implementation of such a system at the Carlsberg A/S beerbrewer in Denmark. We conclude with a discussion on the current trends in the design and the implementation of planning and scheduling systems in practice. Key words: planning; scheduling; supply chain management; enterprise resource planning (ERP) sys- tems; multi-echelon inventory control Submissions and Acceptance: Received October 2002; revisions received April 2003; accepted July 2003. 1. Introduction taking into account inventory holding costs and trans- This paper focuses on models and solution ap- portation costs. -

Scheduling Light-Weight Parallelism in Artcop
Scheduling Light-Weight Parallelism in ArTCoP J. Berthold1,A.AlZain2,andH.-W.Loidl3 1 Fachbereich Mathematik und Informatik Philipps-Universit¨at Marburg, D-35032 Marburg, Germany [email protected] 2 School of Mathematical and Computer Sciences Heriot-Watt University, Edinburgh EH14 4AS, Scotland [email protected] 3 Institut f¨ur Informatik, Ludwig-Maximilians-Universit¨at M¨unchen, Germany [email protected] Abstract. We present the design and prototype implementation of the scheduling component in ArTCoP (architecture transparent control of parallelism), a novel run-time environment (RTE) for parallel execution of high-level languages. A key feature of ArTCoP is its support for deep process and memory hierarchies, shown in the scheduler by supporting light-weight threads. To realise a system with easily exchangeable components, the system defines a micro-kernel, providing basic infrastructure, such as garbage collection. All complex RTE operations, including the handling of parallelism, are implemented at a separate system level. By choosing Concurrent Haskell as high-level system language, we obtain a prototype in the form of an executable specification that is easier to maintain and more flexible than con- ventional RTEs. We demonstrate the flexibility of this approach by presenting implementations of a scheduler for light-weight threads in ArTCoP, based on GHC Version 6.6. Keywords: Parallel computation, functional programming, scheduling. 1 Introduction In trying to exploit the computational power of parallel architectures ranging from multi-core machines to large-scale computational Grids, we are currently developing a new parallel runtime environment, ArTCoP, for executing parallel Haskell code on such complex, hierarchical architectures. -

Optimal Instruction Scheduling Using Integer Programming
Optimal Instruction Scheduling Using Integer Programming Kent Wilken Jack Liu Mark He ernan Department of Electrical and Computer Engineering UniversityofCalifornia,Davis, CA 95616 fwilken,jjliu,[email protected] Abstract { This paper presents a new approach to 1.1 Lo cal Instruction Scheduling local instruction scheduling based on integer programming The lo cal instruction scheduling problem is to nd a min- that produces optimal instruction schedules in a reasonable imum length instruction schedule for a basic blo ck. This time, even for very large basic blocks. The new approach instruction scheduling problem b ecomes complicated (inter- rst uses a set of graph transformations to simplify the data- esting) for pip elined pro cessors b ecause of data hazards and dependency graph while preserving the optimality of the nal structural hazards [11 ]. A data hazard o ccurs when an in- schedule. The simpli edgraph results in a simpli ed integer struction i pro duces a result that is used bya following in- program which can be solved much faster. A new integer- struction j, and it is necessary to delay j's execution until programming formulation is then applied to the simpli ed i's result is available. A structural hazard o ccurs when a graph. Various techniques are used to simplify the formu- resource limitation causes an instruction's execution to b e lation, resulting in fewer integer-program variables, fewer delayed. integer-program constraints and fewer terms in some of the The complexity of lo cal instruction scheduling can de- remaining constraints, thus reducing integer-program solu- p end on the maximum data-hazard latency which occurs tion time.