Turbulence Structures in the Planetary Boundary Layer Measured with a Doppler LIDAR
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Avoiding the Risks of Deadly Lightning Strikes
Avoiding the Risks of Deadly Lightning Strikes Lightning is one of the most underrated severe weather hazards, yet ranks as the second-leading weather killer in the United States. More deadly than hurricanes or tornadoes, lightning strikes in America each year kill an average of 73 people and injure 300 others, according to NOAA's National Weather Service. How Lightning Works Lightning is caused by the attraction between positive and negative charges in the atmosphere, resulting in the buildup and discharge of electrical energy. This rapid heating and cooling of the air produces the shock wave that results in thunder. During a storm, raindrops can acquire extra electrons, which are negatively charged. These surplus electrons seek out a positive charge from the ground. As they flow from the clouds, they knock other electrons free, creating a conductive path. This path follows a zigzag shape that jumps between randomly distributed clumps of charged particles in the air. When the two charges connect, current surges through that jagged path, creating the lightning bolt. The Warning Signs High winds, rainfall, and a darkening cloud cover are the warning signs for possible cloud-to- ground lightning strikes. While many lightning casualties happen at the beginning of an approaching storm, more than 50 percent of lightning deaths occur after the thunderstorm has passed. The lightning threat diminishes after the last sound of thunder, but may persist for more than 30 minutes. When thunderstorms are in the area, but not overhead, the lightning threat can exist when skies are clear. Safety Precautions While nothing offers absolute safety from lightning, some actions can greatly reduce your risks. -

Soaring Weather
Chapter 16 SOARING WEATHER While horse racing may be the "Sport of Kings," of the craft depends on the weather and the skill soaring may be considered the "King of Sports." of the pilot. Forward thrust comes from gliding Soaring bears the relationship to flying that sailing downward relative to the air the same as thrust bears to power boating. Soaring has made notable is developed in a power-off glide by a conven contributions to meteorology. For example, soar tional aircraft. Therefore, to gain or maintain ing pilots have probed thunderstorms and moun altitude, the soaring pilot must rely on upward tain waves with findings that have made flying motion of the air. safer for all pilots. However, soaring is primarily To a sailplane pilot, "lift" means the rate of recreational. climb he can achieve in an up-current, while "sink" A sailplane must have auxiliary power to be denotes his rate of descent in a downdraft or in come airborne such as a winch, a ground tow, or neutral air. "Zero sink" means that upward cur a tow by a powered aircraft. Once the sailcraft is rents are just strong enough to enable him to hold airborne and the tow cable released, performance altitude but not to climb. Sailplanes are highly 171 r efficient machines; a sink rate of a mere 2 feet per second. There is no point in trying to soar until second provides an airspeed of about 40 knots, and weather conditions favor vertical speeds greater a sink rate of 6 feet per second gives an airspeed than the minimum sink rate of the aircraft. -

90001602.Pdf
Kobe University Repository : Kernel タイトル Prediction of human thermophysiological responses during shower Title bathing 著者 Abdul, Munir / Takada, Satoru / Matsushita, Takayuki / Kubo, Hiroko Author(s) 掲載誌・巻号・ページ International Journal of Biometeorology,54(2):165-178 Citation 刊行日 2010-03 Issue date 資源タイプ Journal Article / 学術雑誌論文 Resource Type 版区分 author Resource Version 権利 Rights DOI 10.1007/s00484-009-0265-9 JaLCDOI URL http://www.lib.kobe-u.ac.jp/handle_kernel/90001602 PDF issue: 2021-09-29 PREDICTION OF HUMAN THERMOPHYSIOLOGICAL RESPONSES DURING SHOWER BATHING Abdul Munir Department of Architecture, Faculty of Engineering, Syiah Kuala University, Darussalam, Banda Aceh 23111, Indonesia Satoru Takada Department of Architecture, Graduate School of Engineering, Kobe University, Rokko, Nada, Kobe 657-8501, Japan Phone: +81 78 803 6038 Fax: +81 78 803 6038 Email: [email protected] Takayuki Matsushita Department of Architecture, Graduate School of Engineering, Kobe University, Rokko, Nada, Kobe 657-8501, Japan Hiroko Kubo Department of Environmental Health, Faculty of Human Life and Environment, Nara Women's University, Kitauoya-nishimachi, Nara 630-8506, Japan ABSTRACT This study develops a model to predict the thermophysiological response of the human body during shower bathing. Despite the needs for the quantitative evaluation of human body response during bathing for thermal comfort and safety, the complicated mechanisms of heat transfer at the skin surface, especially 1 during shower bathing, have disturbed the development of adequate models. In this study, an initial modeling approach is proposed by developing a simple heat transfer model at the skin surface during shower bathing, applied to Stolwijk’s human thermal model. -
Electrified Shower Clouds and Their Contribution to the Global Electrical Circuit” (Liu Et
Contribution of Thunderstorms and Shower Clouds to the Global Electric Circuit Review of “Diurnal Variations of Global Thunderstorms and Electrified Shower Clouds and Their Contribution to the Global Electrical Circuit” (Liu et. al. 2010) Kyle Chudler ATS 780 • Two main discrepancies • Amplitude of thunder days is Thunder Days and Carnegie Curve ~2 times that of Carnegie curve • Phases misaligned • Thunder Day curve max: Africa (14 – 15 UTC) • Carnegie curve max: South America (19 – 20 UTC) • Possible explanations: • Ocean not accounted for • Non-lightning producing precipitation (electrified shower clouds) • Try to use TRMM data to get a Whipple (1929) handle on both of these Methods • TRMM Precipitation Features • Groups contiguous raining pixels into one feature • Can get statistics of individual PF’s (max echo height, precipitation volume, etc.) • Divide PFs into thunderstorms, electrified shower clouds, and non-electrified • Thunderstorm: PF’s with at least one lightning flash (LIS) • Electrified Shower Cloud: , T30dBZ < -10 C over land and T30dBZ < -17 C over ocean • Only look at PF’s > 75 km2 • 75% of population, but <10% of rainfall and rain area • Compare several diurnal cycles to Carnegie curve • Rainfall • Total, On/Off Land, Thunderstorm vs Electrified Shower • Total Lightning • Contrast amplitude and phases of cycles • More PFs over Ocean (81%) than land (19%) • Thunderstorms • ~1/200 PFs • 25% of rainfall • Electrified Shower Clouds • ~1/200 PFs • 15% of rainfall Non-electrified Rainfall Dominates Ocean Diurnal Rainfall vs. Carnegie Curve • Total rainfall (black line) has similar phase, smaller amplitude • Includes ocean, which has weaker diurnal signal • Best match is land rainfall • 60% of land rainfall is from electrified storms/showers • Best amplitude match of all cycles Diurnal Rainfall vs. -

ESSENTIALS of METEOROLOGY (7Th Ed.) GLOSSARY
ESSENTIALS OF METEOROLOGY (7th ed.) GLOSSARY Chapter 1 Aerosols Tiny suspended solid particles (dust, smoke, etc.) or liquid droplets that enter the atmosphere from either natural or human (anthropogenic) sources, such as the burning of fossil fuels. Sulfur-containing fossil fuels, such as coal, produce sulfate aerosols. Air density The ratio of the mass of a substance to the volume occupied by it. Air density is usually expressed as g/cm3 or kg/m3. Also See Density. Air pressure The pressure exerted by the mass of air above a given point, usually expressed in millibars (mb), inches of (atmospheric mercury (Hg) or in hectopascals (hPa). pressure) Atmosphere The envelope of gases that surround a planet and are held to it by the planet's gravitational attraction. The earth's atmosphere is mainly nitrogen and oxygen. Carbon dioxide (CO2) A colorless, odorless gas whose concentration is about 0.039 percent (390 ppm) in a volume of air near sea level. It is a selective absorber of infrared radiation and, consequently, it is important in the earth's atmospheric greenhouse effect. Solid CO2 is called dry ice. Climate The accumulation of daily and seasonal weather events over a long period of time. Front The transition zone between two distinct air masses. Hurricane A tropical cyclone having winds in excess of 64 knots (74 mi/hr). Ionosphere An electrified region of the upper atmosphere where fairly large concentrations of ions and free electrons exist. Lapse rate The rate at which an atmospheric variable (usually temperature) decreases with height. (See Environmental lapse rate.) Mesosphere The atmospheric layer between the stratosphere and the thermosphere. -

Downloaded 09/26/21 01:53 PM UTC VOL
418 BULLETIN AMERICAN METEOROLOGICAL SOCIETY Forecasting Summertime Shower Activity at Grand Junction, Colorado WOODROW W. DICKEY U. S. Weather Bureau ABSTRACT Due to the lack of a dense network of reporting stations in the Grand Junction, Colorado area and the inadequate representation of shower activity by observations of rain at a single rain gage, certain arbitrary criteria were set up to define a "shower" day at Grand Junction. Relationships of a number of meteorological variables to shower activity were determined and the four variables which showed the strongest relationships were combined graphically to form an objective forecast aid for determining the probability of shower activity at Grand Junction during the 18-hour period 1130MST to 0530MST. Tests on independent data confirm the relationship found in the developmental data. INTRODUCTION accuracy equal to those that have been issued in the past. HIS study was initiated with the objec- tive of providing one of a number of DEFINITION OF A SHOWER DAY AT objective aids for forecasting various T GRAND JUNCTION weather elements in the Grand Junction, Colorado area. Specifically it was aimed at forecasting Summertime shower activity even in a rela- July and August shower activity during the pe- tively small area is not adequately represented by riod 1130MST to 0530MST the following morn- observation of rain at a single rain gage. Lack- ing, the forecast to be based on data available no ing a dense network of reporting stations in the later than 0530MST of the forecast morning. Grand Junction area, an attempt was made to Since the aid was to be used for the generalized obtain a more representative picture of shower weather forecast which is normally released to activity by inspecting the remarks entered on the the public, no attempt was made to pinpoint the WBAN Form 1130's and setting up certain arbi- trary criteria for deciding if the day were a forecast with respect to time, and a deliberate "shower day" or not. -
Print Key. (Pdf)
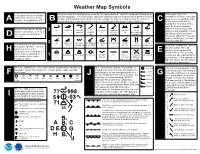
Weather Map Symbols Along the center, the cloud types are indicated. The top symbol is the high-level cloud type followed by the At the upper right is the In the upper left, the temperature mid-level cloud type. The lowest symbol represents low-level cloud over a number which tells the height of atmospheric pressure reduced to is plotted in Fahrenheit. In this the base of that cloud (in hundreds of feet) In this example, the high level cloud is Cirrus, the mid-level mean sea level in millibars (mb) A example, the temperature is 77°F. B C C to the nearest tenth with the cloud is Altocumulus and the low-level clouds is a cumulonimbus with a base height of 2000 feet. leading 9 or 10 omitted. In this case the pressure would be 999.8 mb. If the pressure was On the second row, the far-left Ci Dense Ci Ci 3 Dense Ci Cs below Cs above Overcast Cs not Cc plotted as 024 it would be 1002.4 number is the visibility in miles. In from Cb invading 45° 45°; not Cs ovcercast; not this example, the visibility is sky overcast increasing mb. When trying to determine D whether to add a 9 or 10 use the five miles. number that will give you a value closest to 1000 mb. 2 As Dense As Ac; semi- Ac Standing Ac invading Ac from Cu Ac with Ac Ac of The number at the lower left is the a/o Ns transparent Lenticularis sky As / Ns congestus chaotic sky Next to the visibility is the present dew point temperature. -

Severe Thunderstorm Safety
Severe Thunderstorm Safety Thunderstorms are dangerous because they include lightning, high winds, and heavy rain that can cause flash floods. Remember, it is a severe thunderstorm that produces a tornado. By definition, a thunderstorm is a rain shower that contains lightning. A typical storm is usually 15 miles in diameter lasting an average of 30 to 60 minutes. Every thunderstorm produces lightning, which usually kills more people each year than tornadoes. A severe thunderstorm is a thunderstorm that contains large hail, 1 inch in diameter or larger, and/or damaging straight-line winds of 58 mph or greater (50 nautical mph). Rain cooled air descending from a severe thunderstorms can move at speeds in excess of 100 mph. This is what is called “straight-line” wind gusts. There were 12 injuries from thunderstorm wind gusts in Missouri in 2014, with only 5 injuries from tornadoes. A downburst is a sudden out-rush of this wind. Strong downbursts can produce extensive damage which is often similar to damage produced by a small tornado. A downburst can easily overturn a mobile home, tear roofs off houses and topple trees. Severe thunderstorms can produce hail the size of a quarter (1 inch) or larger. Quarter- size hail can cause significant damage to cars, roofs, and can break windows. Softball- size hail can fall at speeds faster than 100 mph. Thunderstorm Safety Avoid traveling in a severe thunderstorm – either pull over or delay your travel plans. When a severe thunderstorm threatens, follow the same safety rules you do if a tornado threatens. Go to a basement if available. -
Moist Convection
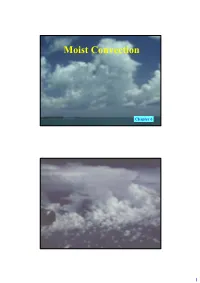
Moist Convection Chapter 6 1 2 Trade Cumuli Afternoon cumulus over land 3 Cumuls congestus Convectively-driven weather systems ¾ Deep convection plays an important role in the dynamics of tropical weather systems. ¾ To make progress in understanding these systems, we must separate the two scales of motion, the large-scale system itself, and the cumulus cloud scale. ¾ We need to find ways of representing the gross effect of the clouds in terms of variables that describe the large scale itself, a problem referred to as the cumulus parameterization problem. 4 Understanding convection ¾ First we consider certain basic aspects of moist convection, including those that distinguish it in a fundamental way from dry convection. ¾ Then we consider the conditions that lead to convection and the nature of individual clouds, distinguishing between those that precipitate and those that do not. ¾ Finally we examine the effects of a field of convective clouds on its environment and vice versa. Dry versus Moist Convection 1. Dry convection 5 The classical fluid dynamical problem of convective instability between two horizontal plates z T− h Equilibrium temperature profile − ∆ T(z) = T+ ( T/h)z ∆ − T = T+ T− 0 0 T+ Convectively instability occurs if the Rayleigh number, Ra, exceeds a threshold value, Rac. The Rayleigh number criterion gThα∆ 3 Ra=>= Ra 657 κν c h α is the cubical coefficient of expansion of the fluid κ is the thermal conductivity ν is the kinematic viscosity 0 The Rayleigh number is ratio of the gross buoyancy force that drives the overturning motion to the two diffusive processes that retard or prevent it. -

Classification of Clouds Clouds Are Usually Classified According to Their Height and Appearance
CLOUDS Clouds are condensed droplets of water and ice crystals. The nuclei of those droplets are dust particles. Near the surface these drops form fog and in the free atmosphere, they form clouds. Clouds have been defined as visible aggregation of minute water droplets and / or ice particles in the air, usually above the general ground level. Air contains moisture and this is extremely important to the formation of clouds. Clouds are formed around microscopic particles such as dust, smoke, salt crystals & other materials that are present in the atmosphere. These materials are called Cloud Condensation Nucleus (CCN). Without these, no cloud formation will take place. There are certain special types, known as ice nucleus, on which droplets freeze or ice crystals form directly from water vapour. Generally condensation nuclei are present in plenty in air. But there is scarcity of special ice forming nuclei. Generally clouds are made up of billion of these tiny water droplets or ice crystals or combination of both. When a current of air rises upwards due to increased temperature it goes up, expands and gets cooled. If the cooling continues till the saturation point is reached, the water vapour condenses and forms clouds. The condensation takes place on a nucleus of dust particles. The water particles individually are very small and suspended in the air. Only when the droplets coalesce to from a drop of sufficient weight, to overcome the resistance of air, they fall as rain. Clouds are considered essential and accurate tools for weather forecasting. Classification of clouds Clouds are usually classified according to their height and appearance. -

Glossary of Severe Weather Terms
Glossary of Severe Weather Terms -A- Anvil The flat, spreading top of a cloud, often shaped like an anvil. Thunderstorm anvils may spread hundreds of miles downwind from the thunderstorm itself, and sometimes may spread upwind. Anvil Dome A large overshooting top or penetrating top. -B- Back-building Thunderstorm A thunderstorm in which new development takes place on the upwind side (usually the west or southwest side), such that the storm seems to remain stationary or propagate in a backward direction. Back-sheared Anvil [Slang], a thunderstorm anvil which spreads upwind, against the flow aloft. A back-sheared anvil often implies a very strong updraft and a high severe weather potential. Beaver ('s) Tail [Slang], a particular type of inflow band with a relatively broad, flat appearance suggestive of a beaver's tail. It is attached to a supercell's general updraft and is oriented roughly parallel to the pseudo-warm front, i.e., usually east to west or southeast to northwest. As with any inflow band, cloud elements move toward the updraft, i.e., toward the west or northwest. Its size and shape change as the strength of the inflow changes. Spotters should note the distinction between a beaver tail and a tail cloud. A "true" tail cloud typically is attached to the wall cloud and has a cloud base at about the same level as the wall cloud itself. A beaver tail, on the other hand, is not attached to the wall cloud and has a cloud base at about the same height as the updraft base (which by definition is higher than the wall cloud). -

Thunderstorms Information
Jackson County Health Department THUNDERSTORMS What is a Thunderstorm? A thunderstorm is a rain shower during which you hear thunder. Since thunder comes from lightning, all thunderstorms have lightning. A thunderstorm is classified as “severe” when it contains one or more of the following: hail three-quarters inch or greater; winds gusting in excess of 50 knots (57.7 mph); or a tornado. Thunderstorms and Lightning All thunderstorms are dangerous and produce lightning. In the United States an average of 300 people are injured and 80 people are killed each year by lightning. Although most lightning victims survive, people struck by lightning often report a variety of long-term debilitating symptoms. Other associated dangers of thunderstorms include tornados, strong winds, hail, and flash flooding. Flash flooding is responsible for more fatalities than any other thunderstorm associated hazard. Dry thunderstorms that do not produce rain that reaches the ground are the most prevalent in the western United States. Falling raindrops evaporate, but lightning can still reach the ground and can start wildfires. Facts about thunderstorms • They may occur singly, in clusters, or in lines. • Some of the most severe occur when a single thunderstorm affects one location for an extended time. • Thunderstorms typically produce heavy rain for a brief period, anywhere from 30 minutes to 1 hour. • Warm, humid conditions are highly favorable for thunderstorm development. • About 10% of thunderstorms are classified as severe. Facts about lightning • Lightning’s unpredictability increases the risk to individuals and property. • Lightning often strikes outside of heavy rain and may occur as far as 10 miles away from any Preparedness Information rainfall.