The “Wandering Tree”
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Development of a Verified Flash File System ⋆
Development of a Verified Flash File System ? Gerhard Schellhorn, Gidon Ernst, J¨orgPf¨ahler,Dominik Haneberg, and Wolfgang Reif Institute for Software & Systems Engineering University of Augsburg, Germany fschellhorn,ernst,joerg.pfaehler,haneberg,reifg @informatik.uni-augsburg.de Abstract. This paper gives an overview over the development of a for- mally verified file system for flash memory. We describe our approach that is based on Abstract State Machines and incremental modular re- finement. Some of the important intermediate levels and the features they introduce are given. We report on the verification challenges addressed so far, and point to open problems and future work. We furthermore draw preliminary conclusions on the methodology and the required tool support. 1 Introduction Flaws in the design and implementation of file systems already lead to serious problems in mission-critical systems. A prominent example is the Mars Explo- ration Rover Spirit [34] that got stuck in a reset cycle. In 2013, the Mars Rover Curiosity also had a bug in its file system implementation, that triggered an au- tomatic switch to safe mode. The first incident prompted a proposal to formally verify a file system for flash memory [24,18] as a pilot project for Hoare's Grand Challenge [22]. We are developing a verified flash file system (FFS). This paper reports on our progress and discusses some of the aspects of the project. We describe parts of the design, the formal models, and proofs, pointing out challenges and solutions. The main characteristic of flash memory that guides the design is that data cannot be overwritten in place, instead space can only be reused by erasing whole blocks. -

ZBD: Using Transparent Compression at the Block Level to Increase Storage Space Efficiency
ZBD: Using Transparent Compression at the Block Level to Increase Storage Space Efficiency Thanos Makatos∗†, Yannis Klonatos∗†, Manolis Marazakis∗, Michail D. Flouris∗, and Angelos Bilas∗† ∗ Foundation for Research and Technology - Hellas (FORTH) Institute of Computer Science (ICS) 100 N. Plastira Av., Vassilika Vouton, Heraklion, GR-70013, Greece † Department of Computer Science, University of Crete P.O. Box 2208, Heraklion, GR 71409, Greece {mcatos, klonatos, maraz, flouris, bilas}@ics.forth.gr Abstract—In this work we examine how transparent compres- • Logical to physical block mapping: Block-level compres- sion in the I/O path can improve space efficiency for online sion imposes a many-to-one mapping from logical to storage. We extend the block layer with the ability to compress physical blocks, as multiple compressed logical blocks and decompress data as they flow between the file-system and the disk. Achieving transparent compression requires extensive must be stored in the same physical block. This requires metadata management for dealing with variable block sizes, dy- using a translation mechanism that imposes low overhead namic block mapping, block allocation, explicit work scheduling in the common I/O path and scales with the capacity and I/O optimizations to mitigate the impact of additional I/Os of the underlying devices as well as a block alloca- and compression overheads. Preliminary results show that online tion/deallocation mechanism that affects data placement. transparent compression is a viable option for improving effective • storage capacity, it can improve I/O performance by reducing Increased number of I/Os: Using compression increases I/O traffic and seek distance, and has a negative impact on the number of I/Os required on the critical path during performance only when single-thread I/O latency is critical. -
No Slide Title
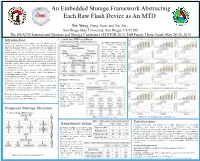
An Embedded Storage Framework Abstracting Each Raw Flash Device as An MTD Wei Wang, Deng Zhou, and Tao Xie, San Diego State University, San Diego, CA 92182 The 8th ACM International Systems and Storage Conference (SYSTOR 2015, Full Paper), Haifa, Israel, May 26-28, 2015 Introduction Our Design1: MTD Proxy Middleware mobile devices such as smart- phones and 3-D digital cameras The MTD proxy middleware has normally use raw flash memory device directly managed by an the following components: embedded flash file system, a dedicated file system designed for address mapping, access storing files on raw flash memory devices. Thus, in addition to queuing management, multiple provide normal file system functions and interface to up layer work thread layer, proxy system, flash file systems are also designed to directly control raw interface module, With the flash memory devices, they can address the inherent constraints of support of the four components, flash (e.g., wear out issue and the erase-before-write problem). the MTD proxy middleware Although existing embedded flash storage systems are effective for enables an existing flash file traditional mobile applications, they are becoming increasingly system to communicate with an inadequate for emerging data- intensive mobile applications due to array of MTD devices without the following limitations: no modifications of existing (1) Insufficient storage capacity: One of the most remarkable trends flash file systems, which is an of mobile computing is that emerging mobile applications are attractive feature for system creating huge volume of data. design and optimization. Figure 2. MTD Proxy Middleware. (2) Incompetent performance: current flash file system only supports serial IO access. -

Crossmedia File System Metafs Exploiting Performance Characteristics from Flash Storage and HDD
Crossmedia File System MetaFS Exploiting Performance Characteristics from Flash Storage and HDD Bachelor Thesis Leszek Kattinger 12. November 2009 { 23. M¨arz2010 Betreuer: Prof. Dr. Thomas Ludwig Julian M. Kunkel Olga Mordvinova Leszek Kattinger Hans-Sachs-Ring 110 68199 Mannheim Hiermit erkl¨areich an Eides statt, dass ich die von mir vorgelegte Arbeit selbstst¨andig verfasst habe, dass ich die verwendeten Quellen, Internet-Quellen und Hilfsmittel vollst¨andig angegeben habe und dass ich die Stellen der Arbeit { einschließlich Tabellen, Karten und Abbildungen {, die anderen Werken oder dem Internet im Wortlaut oder dem Sinn nach ent- nommen sind, auf jeden Fall unter Angabe der Quelle als Entlehnung kenntlich gemacht habe. Mannheim, den 22. M¨arz2010 Leszek Kattinger Abstract Until recently, the decision which storage device is most suitable, in aspects of costs, capacity, performance and reliability has been an easy choice. Only hard disk devices offered requested properties. Nowadays rapid development of flash storage technology, makes these devices competitive or even more attractive. The great advantage of flash storage is, apart from lower energy consumption and insensitivity against mechanical shocks, the much lower access time. Compared with hard disks, flash devices can access data about a hundred times faster. This feature enables a significant performance benefit for random I/O operations. Unfortunately, the situation at present is that HDDs provide a much bigger capacity at considerable lower prices than flash storage devices, and this fact does not seem to be changing in the near future. Considering also the wide-spread use of HDDs, the continuing increase of storage density and the associated increase of sequential I/O performance, the incentive to use HDDs will continue. -

Journaling File Systems
JOURNALING FILE SYSTEMS CS124 – Operating Systems Spring 2021, Lecture 26 2 File System Robustness • The operating system keeps a cache of filesystem data • Secondary storage devices are much slower than main memory • Caching frequently-used disk blocks in memory yields significant performance improvements by avoiding disk-IO operations • ProBlem 1: Operating systems crash. Hardware fails. • ProBlem 2: Many filesystem operations involve multiple steps • Example: deleting a file minimally involves removing a directory entry, and updating the free map • May involve several other steps depending on filesystem design • If only some of these steps are successfully written to disk, filesystem corruption is highly likely 3 File System Robustness (2) • The OS should try to maintain the filesystem’s correctness • …at least, in some minimal way… • Example: ext2 filesystems maintain a “mount state” in the filesystem’s superBlock on disk • When filesystem is mounted, this value is set to indicate how the filesystem is mounted (e.g. read-only, etc.) • When the filesystem is cleanly unmounted, the mount-state is set to EXT2_VALID_FS to record that the filesystem is trustworthy • When OS starts up, if it sees an ext2 drive’s mount-state as not EXT2_VALID_FS, it knows something happened • The OS can take steps to verify the filesystem, and fix it if needed • Typically, this involves running the fsck system utility • “File System Consistency checK” • (Frequently, OSes also run scheduled filesystem checks too) 4 The fsck Utility • To verify the filesystem, -
Linux Kernel Series
Linux Kernel Series By Devyn Collier Johnson More Linux Related Stuff on: http://www.linux.org Linux Kernel – The Series by Devyn Collier Johnson (DevynCJohnson) [email protected] Introduction In 1991, a Finnish student named Linus Benedict Torvalds made the kernel of a now popular operating system. He released Linux version 0.01 on September 1991, and on February 1992, he licensed the kernel under the GPL license. The GNU General Public License (GPL) allows people to use, own, modify, and distribute the source code legally and free of charge. This permits the kernel to become very popular because anyone may download it for free. Now that anyone can make their own kernel, it may be helpful to know how to obtain, edit, configure, compile, and install the Linux kernel. A kernel is the core of an operating system. The operating system is all of the programs that manages the hardware and allows users to run applications on a computer. The kernel controls the hardware and applications. Applications do not communicate with the hardware directly, instead they go to the kernel. In summary, software runs on the kernel and the kernel operates the hardware. Without a kernel, a computer is a useless object. There are many reasons for a user to want to make their own kernel. Many users may want to make a kernel that only contains the code needed to run on their system. For instance, my kernel contains drivers for FireWire devices, but my computer lacks these ports. When the system boots up, time and RAM space is wasted on drivers for devices that my system does not have installed. -

Faults in Linux 2.6 Nicolas Palix, Gaël Thomas, Suman Saha, Christophe Calvès, Gilles Muller, Julia Lawall
Faults in Linux 2.6 Nicolas Palix, Gaël Thomas, Suman Saha, Christophe Calvès, Gilles Muller, Julia Lawall To cite this version: Nicolas Palix, Gaël Thomas, Suman Saha, Christophe Calvès, Gilles Muller, et al.. Faults in Linux 2.6. ACM Transactions on Computer Systems, Association for Computing Machinery, 2014, 32 (2), pp.1–40. 10.1145/2619090. hal-01022704 HAL Id: hal-01022704 https://hal.archives-ouvertes.fr/hal-01022704 Submitted on 16 Jul 2014 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. 4 Faults in Linux 2.6 NICOLAS PALIX, Grenoble - Alps University/UJF, LIG-Erods GAËL THOMAS, SUMAN SAHA, CHRISTOPHE CALVÈS, GILLES MULLER and JULIA LAWALL, Inria/UPMC/Sorbonne University/LIP6-Regal In August 2011, Linux entered its third decade. Ten years before, Chou et al. published a study of faults found by applying a static analyzer to Linux versions 1.0 through 2.4.1. A major result of their work was that the drivers directory contained up to 7 times more of certain kinds of faults than other directories. This result inspired numerous efforts on improving the reliability of driver code. Today, Linux is used in a wider range of environments, provides a wider range of services, and has adopted a new development and release model. -

Data Recovery Function Testing for Digital Forensic Tools Yinghua Guo, Jill Slay
Data Recovery Function Testing for Digital Forensic Tools Yinghua Guo, Jill Slay To cite this version: Yinghua Guo, Jill Slay. Data Recovery Function Testing for Digital Forensic Tools. 6th IFIP WG 11.9 International Conference on Digital Forensics (DF), Jan 2010, Hong Kong, China. pp.297-311, 10.1007/978-3-642-15506-2_21. hal-01060626 HAL Id: hal-01060626 https://hal.inria.fr/hal-01060626 Submitted on 27 Nov 2017 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Distributed under a Creative Commons Attribution| 4.0 International License Chapter 21 DATA RECOVERY FUNCTION TESTING FOR DIGITAL FORENSIC TOOLS Yinghua Guo and Jill Slay Abstract Many digital forensic tools used by investigators were not originally de- signed for forensic applications. Even in the case of tools created with the forensic process in mind, there is the issue of assuring their reliabil- ity and dependability. Given the nature of investigations and the fact that the data collected and analyzed by the tools must be presented as evidence, it is important that digital forensic tools be validated and verified before they are deployed. This paper engages a systematic de- scription of the digital forensic discipline that is obtained by mapping its fundamental functions. -

Cross-Checking Semantic Correctness: the Case of Finding File System Bugs
Cross-checking Semantic Correctness: The Case of Finding File System Bugs Changwoo Min Sanidhya Kashyap Byoungyoung Lee Chengyu Song Taesoo Kim Georgia Institute of Technology Abstract 1. Introduction Today, systems software is too complex to be bug-free. To Systems software is buggy. On one hand, it is often imple- find bugs in systems software, developers often rely oncode mented in unsafe, low-level languages (e.g., C) for achiev- checkers, like Linux’s Sparse. However, the capability of ing better performance or directly accessing the hardware, existing tools used in commodity, large-scale systems is thereby facilitating the introduction of tedious bugs. On the limited to finding only shallow bugs that tend to be introduced other hand, it is too complex. For example, Linux consists of by simple programmer mistakes, and so do not require a almost 19 million lines of pure code and accepts around 7.7 deep understanding of code to find them. Unfortunately, the patches per hour [18]. majority of bugs as well as those that are difficult to find are To help this situation, especially for memory corruption semantic ones, which violate high-level rules or invariants bugs, researchers often use memory-safe languages in the (e.g., missing a permission check). Thus, it is difficult for first place. For example, Singularity34 [ ] and Unikernel [43] code checkers lacking the understanding of a programmer’s are implemented in C# and OCaml, respectively. However, true intention to reason about semantic correctness. in practice, developers largely rely on code checkers. For To solve this problem, we present JUXTA, a tool that au- example, Linux has integrated static code analysis tools (e.g., tomatically infers high-level semantics directly from source Sparse) in its build process to detect common coding errors code. -

Strongbox: Confidentiality, Integrity, and Performance Using Stream Ciphers for Full Drive Encryption
StrongBox: Confidentiality, Integrity, and Performance using Stream Ciphers for Full Drive Encryption Bernard Dickens III Haryadi Gunawi Ariel J. Feldman Henry Hoffmann Computer Science University of Chicago bd3,haryadi,arielfeldman,[email protected] Abstract easily lost or stolen. The current standard for securing data at Full drive encryption (FDE) is especially important for mo- rest is to use the AES cipher in XTS mode [21, 28]. Unfortu- bile devices because they contain large amounts of sensitive nately, employing AES-XTS increases read/write latency by 3–5 compared to unencrypted storage. data yet are easily lost or stolen. Unfortunately, the stan- × dard approach to FDE—AES in XTS mode—is 3–5x slower It is well known that authenticated encryption using stream than unencrypted storage. Authenticated encryption based ciphers—such as ChaCha20 [4]—is faster than using AES on stream ciphers is already used as a faster alternative to (see Section 2). Indeed, Google made the case for stream AES in other contexts, such as HTTPS, but the conventional ciphers over AES, switching HTTPS connections on Chrome wisdom is that stream ciphers are unsuitable for FDE. Used for Android to use a stream cipher for better performance [30]. naively in drive encryption, stream ciphers are vulnerable to Stream ciphers are not used for FDE, however, for two rea- attacks, and mitigating these attacks with on-drive metadata sons: (1) confidentiality and (2) performance. First, when is generally believed to ruin performance. applied naively to stored data, stream ciphers are trivially In this paper, we argue that recent developments in mo- vulnerable to attacks—including many-time pad and rollback bile hardware invalidate this assumption, makimg it possible attacks—that reveal the plaintext by overwriting a secure to use fast stream ciphers for FDE. -

Design and Implementation of Log Structured FAT and Exfat File Systems Keshava Munegowda #1, Dr
Keshava Munegowda et al. / International Journal of Engineering and Technology (IJET) Design and Implementation of Log Structured FAT and ExFAT File Systems Keshava Munegowda #1, Dr. G T Raju #2, Veera Maninkandanraju #3 #1Principal Software Engineer, Advanced Storage Division, EMC Corporation Bangalore, INDIA [email protected] [email protected] #2 Professor and Head, Department of computer Science and Engineering, RNSIT, Bangalore, INDIA [email protected] #3Senior Member Technical Staff, Texas Instruments Bangalore, INDIA [email protected] Abstract— The File Allocation Table (FAT) file system is supported in multiple Operating Systems (OS). Hence, FAT file system is universal exchange format for files/directories used in Solid State Drives (SSD) and Hard disk Drives (HDD). The Microsoft Corporation introduced the new file system called Extended FAT file system (ExFAT) to support larger size storage devices. The ExFAT file system is optimized to use with SSDs. But, Both FAT and ExFAT are not power fail safe. This means that the uncontrolled power loss or abrupt storage device removable from the computer system, during file system update, causes corruption of file system meta data and hence it leads to loss of data in storage device. This paper implements the Logging and Committing features to FAT and ExFAT file systems and ensures that the file system meta data is consistent across the abrupt power loss or device removal from the computer system. Keyword- Commit, Directory, ExFAT, File System, FAT, FATTY, Flash Memory, HDD, HFAT, Journaling, KFAT, Logging, Log Structure, MMC, Power Fail-Safe, RFS, SD, SSD, TFAT, TexFAT, TFS4, TI-LExFAT, TI-LFAT. -

The Linux Kernel: Configuring the Kernel Part 16
The Linux Kernel: Configuring the Kernel Part 16 In this article, we will discuss the input/output ports. First, the "i8042 PC Keyboard controller" driver is needed for PS/2 mice and AT keyboards. Before USB, mice and keyboards used PS/2 ports which are circular ports. The AT keyboard is an 84key IBM keyboard that uses the AT port. The AT port has five pins while the PS/2 port has six pins. Input devices that use the COM port (sometime called RS232 serial port) will need this diver (Serial port line discipline). The COM port is a serial port meaning that one bit at a time is transferred. The TravelMate notebooks need this special driver to use a mouse attached to the QuickPort (ct82c710 Aux port controller). Parallel port adapters for PS/2 mice, AT keyboards, and XT keyboards use this driver (Parallel port keyboard adapter). The "PS/2 driver library" is for PS/2 mice and AT keyboards. "Raw access to serio ports" can be enabled to allow device files to be used as character devices. Next, there is a driver for the "Altera UP PS/2 controller". The PS/2 multiplexer also needs a driver (TQC PS/2 multiplexer). The ARC FPGA platform needs special driver for PS/2 controllers (ARC PS/2 support). NOTE: I want to make it clear that the PS/2 controllers that are discussed in this article are not Sony's game controllers for their PlayStation. This article is discussing the 6pin mouse/keyboard ports. The controller is the card that holds the PS/2 ports.