Efficient Deformations Using Custom Coordinate Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
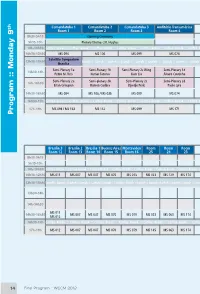
Program :: Monday 9
Comandatuba 1 Comandatuba 2 Comandatuba 3 Auditório Transamérica Una Ilhéus São Paulo 3 São Paulo 2 São Paulo 1 Quito Santiago th Room 1 Room 2 Room 3 Room 4 Room 5 Room 6 Room 7 Room 8 Room 9 Room 10 Room 11 8h30-9h15 Opening Ceremony 9h15-10h Plenary Thomas J.R. Hughes 10h-10h30 Coffee Break :: Coffee Break :: Coffee Break :: Coffee Break :: Coffee Break :: Coffee Break :: Coffee Break :: Coffee Break :: Coffee Break :: Coffee Break :: Coffee Break :: Coffee Break :: Coffee Break 10h30-12h30 MS 094 MS 106 MS 099 MS 074 MS 142 MS 133 MS 001 MS 075 MS 085 MS 002 Satellite Symposium 12h30-13h30 Lunch :: Lunch :: Lunch :: Lunch :: Lunch :: Lunch :: Lunch :: Lunch :: Lunch :: Lunch :: Lunch :: Lunch :: Lunch :: Lunch :: Lunch :: Lunch :: Lunch :: Lunch :: Lunch :: Lunch Brasília Semi-Plenary 1a Semi-Plenary 1b Semi-Plenary 2c Wing Semi-Plenary 1d 13h30-14h Pedro M. Reis Kumar Tamma Kam Liu Álvaro Coutinho Semi-Plenary 2a Semi-plenary 2b Semi-Plenary 2c Semi-Plenary 2d 14h-14h30 Eitan Grinspun Ramon Codina Djordje Peric Paulo Lyra 14h30-16h30 MS 094 MS 106 / MS 035 MS 099 MS 074 MS 142 MS 133 MS 001 MS 075 MS 085 MS 002 16h30-17h Coffee Break :: Coffee Break :: Coffee Break :: Coffee Break :: Coffee Break :: Coffee Break :: Coffee Break :: Coffee Break :: Coffee Break :: Coffee Break :: Coffee Break :: Coffee Break :: Coffee Break 17h-19h MS 094 / MS 163 MS 132 MS 099 MS 171 MS 142 / MS 005 MS 116 MS 001 MS 075 MS 085 MS 002 Program :: Monday 9 Brasília 3 Brasília 2 Brasília 1 Buenos Aires Montevideo Room Room Room Room Room Room Room Room -

14Th U.S. National Congress on Computational Mechanics
14th U.S. National Congress on Computational Mechanics Montréal • July 17-20, 2017 Congress Program at a Glance Sunday, July 16 Monday, July 17 Tuesday, July 18 Wednesday, July 19 Thursday, July 20 Registration Registration Registration Registration Short Course 7:30 am - 5:30 pm 7:30 am - 5:30 pm 7:30 am - 5:30 pm 7:30 am - 11:30 am Registration 8:00 am - 9:30 am 8:30 am - 9:00 am OPENING PL: Tarek Zohdi PL: Andrew Stuart PL: Mark Ainsworth PL: Anthony Patera 9:00 am - 9.45 am Chair: J.T. Oden Chair: T. Hughes Chair: L. Demkowicz Chair: M. Paraschivoiu Short Courses 9:45 am - 10:15 am Coffee Break Coffee Break Coffee Break Coffee Break 9:00 am - 12:00 pm 10:15 am - 11:55 am Technical Session TS1 Technical Session TS4 Technical Session TS7 Technical Session TS10 Lunch Break 11:55 am - 1:30 pm Lunch Break Lunch Break Lunch Break CLOSING aSPL: Raúl Tempone aSPL: Ron Miller aSPL: Eldad Haber 1:30 pm - 2:15 pm bSPL: Marino Arroyo bSPL: Beth Wingate bSPL: Margot Gerritsen Short Courses 2:15 pm - 2:30 pm Break-out Break-out Break-out 1:00 pm - 4:00 pm 2:30 pm - 4:10 pm Technical Session TS2 Technical Session TS5 Technical Session TS8 4:10 pm - 4:40 pm Coffee Break Coffee Break Coffee Break Congress Registration 2:00 pm - 8:00 pm 4:40 pm - 6:20 pm Technical Session TS3 Poster Session TS6 Technical Session TS9 Reception Opening in 517BC Cocktail Coffee Breaks in 517A 7th floor Terrace Plenary Lectures (PL) in 517BC 7:00 pm - 7:30 pm Cocktail and Banquet 6:00 pm - 8:00 pm Semi-Plenary Lectures (SPL): Banquet in 517BC aSPL in 517D 7:30 pm - 9:30 pm Viewing of Fireworks bSPL in 516BC Fireworks and Closing Reception Poster Session in 517A 10:00 pm - 10:30 pm on 7th floor Terrace On behalf of Polytechnique Montréal, it is my pleasure to welcome, to Montreal, the 14th U.S. -

Newton-Krylov-BDDC Solvers for Nonlinear Cardiac Mechanics
Newton-Krylov-BDDC solvers for nonlinear cardiac mechanics Item Type Article Authors Pavarino, L.F.; Scacchi, S.; Zampini, Stefano Citation Newton-Krylov-BDDC solvers for nonlinear cardiac mechanics 2015 Computer Methods in Applied Mechanics and Engineering Eprint version Post-print DOI 10.1016/j.cma.2015.07.009 Publisher Elsevier BV Journal Computer Methods in Applied Mechanics and Engineering Rights NOTICE: this is the author’s version of a work that was accepted for publication in Computer Methods in Applied Mechanics and Engineering. Changes resulting from the publishing process, such as peer review, editing, corrections, structural formatting, and other quality control mechanisms may not be reflected in this document. Changes may have been made to this work since it was submitted for publication. A definitive version was subsequently published in Computer Methods in Applied Mechanics and Engineering, 18 July 2015. DOI:10.1016/ j.cma.2015.07.009 Download date 07/10/2021 05:34:35 Link to Item http://hdl.handle.net/10754/561071 Accepted Manuscript Newton-Krylov-BDDC solvers for nonlinear cardiac mechanics L.F. Pavarino, S. Scacchi, S. Zampini PII: S0045-7825(15)00221-2 DOI: http://dx.doi.org/10.1016/j.cma.2015.07.009 Reference: CMA 10661 To appear in: Comput. Methods Appl. Mech. Engrg. Received date: 13 December 2014 Revised date: 3 June 2015 Accepted date: 8 July 2015 Please cite this article as: L.F. Pavarino, S. Scacchi, S. Zampini, Newton-Krylov-BDDC solvers for nonlinear cardiac mechanics, Comput. Methods Appl. Mech. Engrg. (2015), http://dx.doi.org/10.1016/j.cma.2015.07.009 This is a PDF file of an unedited manuscript that has been accepted for publication. -

Analysis-Guided Improvements of the Material Point Method
ANALYSIS-GUIDED IMPROVEMENTS OF THE MATERIAL POINT METHOD by Michael Dietel Steffen A dissertation submitted to the faculty of The University of Utah in partial fulfillment of the requirements for the degree of Doctor of Philosophy in Computing School of Computing The University of Utah December 2009 Copyright c Michael Dietel Steffen 2009 ° All Rights Reserved THE UNIVERSITY OF UTAH GRADUATE SCHOOL SUPERVISORY COMMITTEE APPROVAL of a dissertation submitted by Michael Dietel Steffen This dissertation has been read by each member of the following supervisory committee and by majority vote has been found to be satisfactory. Chair: Robert M. Kirby Martin Berzins Christopher R. Johnson Steven G. Parker James E. Guilkey THE UNIVERSITY OF UTAH GRADUATE SCHOOL FINAL READING APPROVAL To the Graduate Council of the University of Utah: I have read the dissertation of Michael Dietel Steffen in its final form and have found that (1) its format, citations, and bibliographic style are consistent and acceptable; (2) its illustrative materials including figures, tables, and charts are in place; and (3) the final manuscript is satisfactory to the Supervisory Committee and is ready for submission to The Graduate School. Date Robert M. Kirby Chair, Supervisory Committee Approved for the Major Department Martin Berzins Chair/Dean Approved for the Graduate Council Charles A. Wight Dean of The Graduate School ABSTRACT The Material Point Method (MPM) has shown itself to be a powerful tool in the simulation of large deformation problems, especially those involving complex geometries and contact where typical finite element type methods frequently fail. While these large complex problems lead to some impressive simulations and so- lutions, there has been a lack of basic analysis characterizing the errors present in the method, even on the simplest of problems. -

Numerical Methods for Wave Equations: Part I: Smooth Solutions
WPPII Computational Fluid Dynamics I Numerical Methods for Wave Equations: Part I: Smooth Solutions Instructor: Hong G. Im University of Michigan Fall 2001 Computational Fluid Dynamics I WPPII Outline Solution Methods for Wave Equation Part I • Method of Characteristics • Finite Volume Approach and Conservative Forms • Methods for Continuous Solutions - Central and Upwind Difference - Stability, CFL Condition - Various Stable Methods Part II • Methods for Discontinuous Solutions - Burgers Equation and Shock Formation - Entropy Condition - Various Numerical Schemes WPPII Computational Fluid Dynamics I Method of Characteristics WPPII Computational Fluid Dynamics I 1st Order Wave Equation ∂f ∂f + c = 0 ∂t ∂x The characteristics for this equation are: dx df = c; = 0; f dt dt t f x WPPII Computational Fluid Dynamics I 1-D Wave Equation (2nd Order Hyperbolic PDE) ∂ 2 f ∂ 2 f − c2 = 0 ∂t 2 ∂x2 Define ∂f ∂f v = ; w = ; ∂t ∂x which leads to ∂v ∂w − c2 = 0 ∂t ∂x ∂w ∂v − = 0 ∂t ∂x WPPII Computational Fluid Dynamics I In matrix form v 0 − c2 v t + x = 0 or u + Au = 0 − t x wt 1 0 wx Can it be transformed into the form v λ 0v t + x = 0 or u + λu = 0 ? λ t x wt 0 wx Find the eigenvalue, eigenvector ()AT − λI q = 0 − λ −1 l 1 = 0 − 2 − λ c l2 WPPII Computational Fluid Dynamics I Eigenvalue dx AT − λI = 0; λ2 − c2 = 0; λ = = ±c dt Eigenvector 1 For λ = +c, − cl − l = 0; q = 1 2 1 − c 1 For λ = −c, cl − l = 0; q = 1 2 2 c The solution (v,w) is governed by ODE’s along the characteristic lines dx / dt = ±c WPPII -

Numerical Convection Algorithms and Their Role in Eulerian CFD Reactor Simulations
International Journal of Chemical Reactor Engineering Volume 1 2003 Article A1 Numerical Convection Algorithms and Their Role in Eulerian CFD Reactor Simulations Hugo A. Jakobsen∗ ∗Norwegian University of Science and Technology, [email protected] Copyright c 2003 by the authors. All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means, electronic, mechanical, photocopying, recording, or otherwise, without the prior written permission of the publisher, bepress. Numerical Convection Algorithms and Their Role in Eulerian CFD Reactor Simulations Hugo A. Jakobsen Abstract In this paper a comparative convection algorithm study is presented. The performance of a large number of schemes is compared evaluating the predicted solutions for a standard benchmarking test problem. The nature of the errors caused by the numerical approximations to the convection term is highlighted. Although there is no algorithm that performs the best in general, several conclu- sions can be made. The tests performed show that the 1st order upwind scheme and several variations of this scheme are very diffusive and should be avoided. Most stable 2nd order schemes seem to be much more accurate, whereas the ac- curacy gained by higher order schemes (3rd order and 4th order) may be a little more costly. Implicit time integration schemes are usually not as efficient as the corresponding explicit schemes due to the computational time required on the it- erative process. With larger time steps the accuracy of implicit schemes decrease rapidly. The choice of proper higher order schemes (2nd order schemes) is then seemingly determined by the trade off between accuracy and computational time. -

Scalable Large-Scale Fluid-Structure Interaction Solvers in the Uintah Framework Via Hybrid Task-Based Parallelism Algorithms
1 Scalable Large-scale Fluid-structure Interaction Solvers in the Uintah Framework via Hybrid Task-based Parallelism Algorithms Qingyu Meng, Martin Berzins UUSCI-2012-004 Scientific Computing and Imaging Institute University of Utah Salt Lake City, UT 84112 USA May 7, 2012 Abstract: Uintah is a software framework that provides an environment for solving fluid-structure interaction problems on structured adaptive grids on large-scale science and engineering problems involving the solution of partial differential equations. Uintah uses a combination of fluid-flow solvers and particle-based methods for solids, together with adaptive meshing and a novel asynchronous task-based approach with fully automated load balancing. When applying Uintah to fluid-structure interaction problems with mesh refinement, the combination of adaptive meshing and the move- ment of structures through space present a formidable challenge in terms of achieving scalability on large-scale parallel computers. With core counts per socket continuing to grow along with the prospect of less memory per core, adopting a model that uses MPI to communicate between nodes and a shared memory model on-node is one approach to achieve scalability at full machine capacity on current and emerging large-scale systems. For this approach to be successful, it is necessary to design data-structures that large numbers of cores can simultaneously access without contention. These data structures and algorithms must also be designed to avoid the overhead involved with locks and other synchronization primitives when running on large number of cores per node, as contention for acquiring locks quickly becomes untenable. This scalability challenge is addressed here for Uintah, by the development of new hybrid runtime and scheduling algorithms combined with novel lockfree data structures, making it possible for Uintah to achieve excellent scalability for a challenging fluid-structure problem with mesh refinement on as many as 260K cores. -

The Material-Point Method for Granular Materials
Comput. Methods Appl. Mech. Engrg. 187 (2000) 529±541 www.elsevier.com/locate/cma The material-point method for granular materials S.G. Bardenhagen a, J.U. Brackbill b,*, D. Sulsky c a ESA-EA, MS P946 Los Alamos National Laboratory, Los Alamos, NM 87545, USA b T-3, MS B216 Los Alamos National Laboratory, Los Alamos, NM 87545, USA c Department of Mathematics and Statistics, University of New Mexico, Albuquerqe, NM 87131, USA Abstract A model for granular materials is presented that describes both the internal deformation of each granule and the interactions between grains. The model, which is based on the FLIP-material point, particle-in-cell method, solves continuum constitutive models for each grain. Interactions between grains are calculated with a contact algorithm that forbids interpenetration, but allows separation and sliding and rolling with friction. The particle-in-cell method eliminates the need for a separate contact detection step. The use of a common rest frame in the contact model yields a linear scaling of the computational cost with the number of grains. The properties of the model are illustrated by numerical solutions of sliding and rolling contacts, and for granular materials by a shear calculation. The results of numerical calculations demonstrate that contacts are modeled accurately for smooth granules whose shape is resolved by the computation mesh. Ó 2000 Elsevier Science S.A. All rights reserved. 1. Introduction Granular materials are large conglomerations of discrete macroscopic particles, which may slide against one another but not penetrate [9]. Like a liquid, granular materials can ¯ow to assume the shape of the container. -

Preconditioning the Coarse Problem of BDDC Methods—Three-Level, Algebraic Multigrid, and Vertex-Based Preconditioners
Electronic Transactions on Numerical Analysis. Volume 51, pp. 432–450, 2019. ETNA Kent State University and Copyright c 2019, Kent State University. Johann Radon Institute (RICAM) ISSN 1068–9613. DOI: 10.1553/etna_vol51s432 PRECONDITIONING THE COARSE PROBLEM OF BDDC METHODS— THREE-LEVEL, ALGEBRAIC MULTIGRID, AND VERTEX-BASED PRECONDITIONERS∗ AXEL KLAWONNyz, MARTIN LANSERyz, OLIVER RHEINBACHx, AND JANINE WEBERy Abstract. A comparison of three Balancing Domain Decomposition by Constraints (BDDC) methods with an approximate coarse space solver using the same software building blocks is attempted for the first time. The comparison is made for a BDDC method with an algebraic multigrid preconditioner for the coarse problem, a three-level BDDC method, and a BDDC method with a vertex-based coarse preconditioner. It is new that all methods are presented and discussed in a common framework. Condition number bounds are provided for all approaches. All methods are implemented in a common highly parallel scalable BDDC software package based on PETSc to allow for a simple and meaningful comparison. Numerical results showing the parallel scalability are presented for the equations of linear elasticity. For the first time, this includes parallel scalability tests for a vertex-based approximate BDDC method. Key words. approximate BDDC, three-level BDDC, multilevel BDDC, vertex-based BDDC AMS subject classifications. 68W10, 65N22, 65N55, 65F08, 65F10, 65Y05 1. Introduction. During the last decade, approximate variants of the BDDC (Balanc- ing Domain Decomposition by Constraints) and FETI-DP (Finite Element Tearing and Interconnecting-Dual-Primal) methods have become popular for the solution of various linear and nonlinear partial differential equations [1,8,9, 12, 14, 15, 17, 19, 21, 24, 25]. -

Domain Decomposition Methods for Problems in H(Curl)
Domain Decomposition Methods for Problems in H (curl) by Juan Gabriel Calvo A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy Department of Mathematics New York University September 2015 Professor Olof B. Widlund ©Juan Gabriel Calvo All rights reserved, 2015 Dedication To my family. iv Acknowledgements First, my deepest gratitude goes to my advisor Olof Widlund. I thank him profoundly for his direction, guidance, support and advice during four years. I would also like to thank the rest of my committee: Professors Berger, Good- man, O'Neil and Stadler. In addition, I also thank Dr. Clark Dohrmann of the SANDIA-Albuquerque laboratories for his help and comments throughout my re- search. Finally I thank my Alma Mater, Universidad de Costa Rica, for the support during my academic education at NYU. v Abstract Two domain decomposition methods for solving vector field problems posed in H(curl) and discretized with N´ed´elecfinite elements are considered. These finite elements are conforming in H(curl). A two-level overlapping Schwarz algorithm in two dimensions is analyzed, where the subdomains are only assumed to be uniform in the sense of Peter Jones. The coarse space is based on energy minimization and its dimension equals the number of interior subdomain edges. Local direct solvers are based on the overlapping subdomains. The bound for the condition number depends only on a few geometric parameters of the decomposition. This bound is independent of jumps in the coefficients across the interface between the subdomains for most of the different cases considered. -

Multigrid Solvers for Immersed Finite Element Methods and Immersed Isogeometric Analysis
Computational Mechanics https://doi.org/10.1007/s00466-019-01796-y ORIGINAL PAPER Multigrid solvers for immersed finite element methods and immersed isogeometric analysis F. de Prenter1,3 · C. V. Verhoosel1 · E. H. van Brummelen1 · J. A. Evans2 · C. Messe2,4 · J. Benzaken2,5 · K. Maute2 Received: 26 March 2019 / Accepted: 10 November 2019 © The Author(s) 2019 Abstract Ill-conditioning of the system matrix is a well-known complication in immersed finite element methods and trimmed isogeo- metric analysis. Elements with small intersections with the physical domain yield problematic eigenvalues in the system matrix, which generally degrades efficiency and robustness of iterative solvers. In this contribution we investigate the spectral prop- erties of immersed finite element systems treated by Schwarz-type methods, to establish the suitability of these as smoothers in a multigrid method. Based on this investigation we develop a geometric multigrid preconditioner for immersed finite element methods, which provides mesh-independent and cut-element-independent convergence rates. This preconditioning technique is applicable to higher-order discretizations, and enables solving large-scale immersed systems at a computational cost that scales linearly with the number of degrees of freedom. The performance of the preconditioner is demonstrated for conventional Lagrange basis functions and for isogeometric discretizations with both uniform B-splines and locally refined approximations based on truncated hierarchical B-splines. Keywords Immersed finite element method · Fictitious domain method · Iterative solver · Preconditioner · Multigrid 1 Introduction [14–21], scan based analysis [22–27] and topology optimiza- tion, e.g., [28–34]. Immersed methods are useful tools to avoid laborious and An essential aspect of finite element methods and iso- computationally expensive procedures for the generation of geometric analysis is the computation of the solution to a body-fitted finite element discretizations or analysis-suitable system of equations. -

LD5655.V856 1996.P483.Pdf (6.211Mb)
NEW EFFICIENT CONTACT DISCONTINUITY CAPTURING TECHNIQUES IN SUPERSONIC FLOW SIMULATIONS By Sergei V. Pevchin A DISSERTATION SUBMITTED TO THE FACULTY OF VIRGINIA POLYTECHNIC INSTITUTE AND STATE UNIVERSITY IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF DOCTOR OF PHILOSOPHY IN AEROSPACE ENGINEERING Rr ernard Grossman, Chairman fel CL Ah Le John SteiAVoff Robert W. Walters Seek hy SHED é Joseph A. Schetz jes FIM. Lfff September 1996 Blacksburg, Virginia Keywords: CFD, supersonic flow, discontinuities, confinement, capturing Abstract NEW EFFICIENT CONTACT DISCONTINUITY CAPTURING TECHNIQUES IN SUPERSONIC FLOW SIMULATIONS by Sergei V. Pevchin Committee Chairman: Bernard Grossman Aerospace Engineering (ABSTRACT) Accurate numerical algorithms for solving systems of nonlinear hyperbolic equations are considered. The issues of the capturing and the non-diffusive resolution of contact discontinuities were investigated using two different approaches: a kinetic fluctuation splitting scheme and a discontinuity confinement scheme based on an antidiffusion approach. In both approaches cell-vertex fluctuation-splitting methods are used in order to generate a multi-dimensional procedure. The kinetic fluctuation-splitting scheme presented here is a Boltzmann type scheme based on an LDA-scheme discretization on a triangulated Cartesian mesh that uses di- agonal adaptive strategy. The LDA scheme developed by Struijs, Deconinck and Roe has the property of being second-order accurate and linear for a scalar advection equa- tion. It is implemented for the Boltzmann equation following the work of Eppard and Grossman and completes the series of multi-dimensional Euler solvers with upwinding applied at the kinetic level. The MKFS-LDA scheme is a cell-vertex scheme. It was obtained by taking the moments of the fluctuation in the distribution function that are calculated according to the LDA fluctuation splitting procedure on a kinetic level.