Emax Link Abbreviated Switchgear Application Guide
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Electrical Components
ELECTRICAL COMPONENTS Magnetic Starters Coil HP @ 115V HP @ 230V HP @ 230V HP @ 380V HP @ 460V Part No. Model No. Frame Voltage 1 PH 1 PH 3 PH 3 PH 3 PH 6-4003 CH CE15BNS3TB B 24V .05 1.0 2.0 5.0 5.0 6-4000 CH CE15BNS3AB B 120V .05 1.0 2.0 5.0 5.0 6-4001 CH CE15BNS3BB B 240V .05 1.0 2.0 5.0 5.0 6-4002 CH CE15BNS3CB B 480V .05 1.0 2.0 5.0 5.0 6-4006 CH CE15CNS3TB C 24V .05 2.0 3.0 5.0 7.5 6-4004 CH CE15CNS3AB C 120V .05 2.0 3.0 5.0 7.5 6-4005 CH CE15CNS3BB C 240V .05 2.0 3.0 5.0 7.5 • Cutler-Hammer quality 6-4007 CH CE15DNS3AB D 120V 1.0 3.0 5.0 10.0 10.0 • Highest HP rating 6-4008 CH CE15DNS3BB D 240V 1.0 3.0 5.0 10.0 10.0 in a compact space 6-4009 CH CE15DNS3CB D 480V 1.0 3.0 5.0 10.0 10.0 saving design 6-4024 CH CE15DNS3DB D 600V 1.0 3.0 5.0 10.0 10.0 • Long-life twin break, silver cadmium oxide 6-4012 CH CE15ENS3TB E 24V 2.0 3.0 7.5 10.0 15.0 contacts provide superior 6-4010 CH CE15ENS3AB E 120V 2.0 3.0 7.5 10.0 15.0 resistance to welding 6-4011 CH CE15ENS3BB E 240V 2.0 3.0 7.5 10.0 15.0 and arc erosion 6-4015 CH CE15FNS3TB F 24V 2.0 5.0 10.0 15.0 20.0 • Din rail mounting 6-4013 CH CE15FNS3AB F 120V 2.0 5.0 10.0 15.0 20.0 6-4014 CH CE15FNS3BB F 240V 2.0 5.0 10.0 15.0 20.0 6-4016 CH CE15FNS3HB F 277V 2.0 5.0 10.0 15.0 20.0 6-4017 CH CE15FNS3CB F 480V 2.0 5.0 10.0 15.0 20.0 6-4020 CH CE15HNS3TB-09 H 24V 3.0 7.5 15.0 25.0 30.0 6-4018 CH CE15HNS3AB-09 H 120V 3.0 7.5 15.0 25.0 30.0 6-4019 CH CE15HNS3BB-09 H 240V 3.0 7.5 15.0 25.0 30.0 6-4021 CH CE15JNS3AB-09 J 120V 5.0 10.0 20.0 30.0 40.0 6-4022 CH CE15JNS3BB-09 J 240V 5.0 10.0 20.0 30.0 40.0 Overload Relays Push Button & Contact Blocks • Cutler-Hammer quality • Direct heated bimetal elements • Adjustable trip current, overload trip indication • Cutler-Hammer quality • Manual/automatic reset • Heavy-duty • Din rail mounting • Water tight/oil tight Part No. -

Helios Standard Range Catalogue
Measure. Control. Regulate. Comfortably controlled and energy-saving. MEASURE CONTROL REGULATE Controlling ventilation and Changes in room occu- Complete system solutions The extensive MSR range air conditioning systems pancy, deteriorations in bring the maximum possible from Helios provides the in accordance with the quality of air at different security for the user and full ideal solution for any appli- changing requirements times, fluctuating tempera- guarantee by Helios. cation and simultaneously and conditions is a must tures, day and night set- Furthermore, a lot of time meets all requirements in for comfortable, energy tings, etc. call for corre- can be saved during plan- relation to energy saving efficient ventilation. sponding adjustments. ning, installation and opera- and noise reduction. Helios offers regulation, tion if the control and regu- control and switch devices lation devices are perfectly for all functions, which are adapted to the fans and tailored to the fans. their functions. Problems are solved before they emerge. 525 Measure Control · Regulate Control. Regulate. Optimise. Task Helios controller solution Page Manual control of air I Manual speed controller flow volume – Without motor protection – 10 V, 24 V DC – Potentiometer for EC fans PU / PA, SU / SA 541 – 230 V~ – Electronic, flush / surface mounted ES, BSX 531 – 230 V~ – Transformer, surface mounted TSW, TSSW 532 – 400 V 3~ – Transformer, surface mounted TSD, TSSD 533 – 230 V~ – Transformer, electronic, surface mounted ETW 535 – With built-in motor full protection for connection to thermal contacts – 230 V~ / 400 V 3~ – Transformer, surface mounted MWS / RDS 532 f. – 400 V 3~ – Electronic, surface mounted ESD 535 – 400 V 3~ – Frequency inverter FU 536 f. -

6.2. Certification Mark 6.3. Products Requiring
6. CCC Approved Equipment 6.1. What is CCC? In 1993, CCIB (China Commodity Inspection Bureau) has introduced CCIB CCEE Safety Certification (CCIB Certification) for imported electric and electronic products under the control of SAIQ (The State + Administration for Entry-Exit Inspection and Quarantine of P.R. of China). In 1994, CCEE (China Commission for Conformity Certification of Electrical Equipment) has introduced Safety Certification (CCEE CCC Certification) for electric and electronic products sold in China, under the control of CSBTS (China State Bureau of Quality and Technical Supervision). In such situation, the government of China took the opportunity of joining in WTO (World Trade Organization) in November 2001, and two certification (CCEE and CCIB) merged into a single certification. CCC (China Compulsory Certification) was announced as a new compulsory product safety certification. CCC has enforced on May 1, 2002 and effective on August 1, 2003. 6.2. Certification Mark One of the following 4 marks shall be displayed on products or packages and instruction manuals. S EMC S&E F S: Safety EMC: EMC S&E: Safety and EMC F: Fire-fighting Products 6.3. Products Requiring CCC Products requiring Certification should be the following 19 items, 132 categories listed in the “First Catalogue of Products Subjects to Compulsory Certification” published as “Joint Announcement No. 2001-33 by AQSIQ*1 and CNCA*2”. *1: State General Administration of the People’s Republic of China for Quality Supervision and Inspection and Quarantine *2: Certification -

KRAUS & NAIMER BLUE LINE Push Buttons and Pilot Lights
KRAUS & NAIMER BLUE LINE Push Buttons and Pilot Lights Web-site: http://www.krausnaimer.com I S O 9001 Programs Push buttons and pilot lights by Kraus & Naimer represent an ideal combination of functional security and economical efficiency in a modular design. Push Buttons Cam Switches • Non-illuminated or illuminated • ON/OFF switches and double-throw switches • Flush, extended or with extended front ring • Protection IP65 • Momentary or latched (for converting into spring return • For further cam switches, refer to Catalogue 120 function) Pilot Lights Enclosures • Standard units flush or conical • Plastic yellow or grey • Solid pilot lights (direct wire) • With 1, 2, 3, 4 or 6 options Double-Push Buttons Legend Options • Non-illuminated or illuminated • Front plates and color caps • Legend inserts Emergency Stop Push Buttons Accessories • Fool-proof • A wide range of accessories are available, e.g. protection shrouds • Non-illuminated or illuminated and protection caps • Optional mounting in enclosure Potentiometer Environmentally Compatible Materials • Incl. resistor • Cadmium and asbestos-free • recyclable Reset Push Button Selection • Incl. reset rod • Complete units • Pre-assembled front elements • Individual components Rotary Switches • Non-illuminated or illuminated • Without and with key • Momentary (for converting into spring return function) Contact Blocks and LED Pilot Light Assemblies Contact blocks • Finger-proof and open terminals (IP 20) LED Pilot Light • Captive mounting screws Assemblies Coupling • Low overall depth, -

Measure. Control. Regulate
Measure. Control. Regulate. Comfortably controlled and energy-saving. MEASURE CONTROL REGULATE Controlling ventilation and Changes in room occu- Complete system solutions The extensive MSR range air conditioning systems pancy, deteriorations in bring the maximum possible from Helios provides the in accordance with the quality of air at different security for the user and full ideal solution for any appli- changing requirements times, fluctuating tempera- guarantee by Helios. cation and simultaneously and conditions is a must tures, day and night set- Furthermore, a lot of time meets all requirements in for comfortable, energy tings, etc. call for corre- can be saved during plan- relation to energy saving efficient ventilation. sponding adjustments. ning, installation and opera- and noise reduction. Helios offers regulation, tion if the control and regu- control and switch devices lation devices are perfectly for all functions, which are adapted to the fans and tailored to the fans. their functions. Problems are solved before they emerge. 525 Measure Control · Regulate Control. Regulate. Optimise. Task Helios controller solution Page Manual control of air I Manual speed controller flow volume – Without motor protection – 10 V, 24 V DC – Potentiometer for EC fans PU / PA, SU / SA 541 – 230 V~ – Electronic, flush / surface mounted ES, BSX 531 – 230 V~ – Transformer, surface mounted TSW, TSSW 532 – 400 V 3~ – Transformer, surface mounted TSD, TSSD 533 – 230 V~ – Transformer, electronic, surface mounted ETW 535 – With built-in motor full protection for connection to thermal contacts – 230 V~ / 400 V 3~ – Transformer, surface mounted MWS / RDS 532 f. – 400 V 3~ – Electronic, surface mounted ESD 535 – 400 V 3~ – Frequency inverter FU 536 f. -

Symbol Overview F25 001 HWR
0 1 2 3 4 5 6 7 8 9 Symbol overview F25_001_HWR 0 8 24 SL ONE KW ~ Power NO contact of a NC contact, late break Electromechanical operating contactor device of an AC relay 1 9 25 S SWR KAR2 NO contact NO contact, momentary Electromechanical operating contact, contact make on device with pick-up / off-delay actuation (right) 2 10 26 O SWB KRM2 NC contact NO contact, momentary Electromechanical operating contact on actuation and device of a remanent relay release (right and left) 3 11 29 SSV SWL KR2 Normally open with time delay NO contact, momentary Electromechanical operating opening (T.O.) contact, contact make on device with off-delay release (left) 4 13 30 OOV ST X Normally closed with time NO contact, electrothermal Terminal delay closing (T.C.) actuation 5 14 31 SOV OT XBS Normally open with time delay NC contact, electrothermal Female and male pin closing (T.C.) actuation 6 20 33 OSV K XF Normally closed with time Electromechanical operating Fused terminal delay opening (T.O.) device, general / relay coil, general 7 21 34 SVE KA2 XFD NO contact, leading Electromechanical operating Fused terminal with LED device with pick-up delay Suppl. field: 2 Date 2/24/2012 EPLAN EPLAN Software & Symbol overview = Ed. hwagner Service + Appr Symbol overview GmbH & Co. KG IEC_tpl001 Page 1 Modification Date Name Original Replacement of Replaced by Page 26 0 1 2 3 4 5 6 7 8 9 Symbol overview F25_001_HWR 35 43 51 SSD SSSR R Pushbutton, NO contact, Switch, NO contact, operated Resistor, general operated by pushing by key 36 44 53 SOD SOSR C Pushbutton, -
GE ZENITH MASTER PRICE LIST Common Replacement Parts G O-1153AE May 19, 2008 Serial Number of Unit Required Prior to Ordering
GE ZENITH MASTER PRICE LIST Common Replacement Parts g O-1153AE May 19, 2008 Serial Number of Unit required prior to ordering ZC 080BA9S120LB LED - White 120V 50.25 ZC 080BA9S120LG LED - Yellow/Amber 120V 50.25 ZC 080BA9S120LR LED - Red 120V 50.25 ZC 080BA9S120LV LED - Green 120V 50.25 ZC 080BA9S24LB LED - White 24V 50.25 ZC 080BA9S24LG LED - Yellow/Amber 28V 50.25 ZC 080BA9S24LR LED - Red 28V 50.25 ZC 080BA9S24LV LED - Green 28V 50.25 ZC 43050 Synch Light 14.50 ZC BA9S160 Bulb 160VAC - Incand. min purchase 6 5.25 ZC BA9S24 Bulb 24VAC - Incand. min purchase 6 13.50 ZC CR420NPL0224 2-Pole Control Relays, 24Vdc Coil 35.00 ZC CR420NPL022J 2-Pole Control Relays, 120VAC Coil 40.00 ZC CR420NPL0444 4-Pole Control Relays, 24Vdc Coil 40.00 ZC E-3009 Trip Pin (for 2410 exercisor clock on day wheel) min purchase 6 3.25 ZC E-3402 Manual operating handle shaft ZBTS40 (add PS-3496 grip) 20.50 ZC E-4099 Manual operating handle shaft ZTS/ZTSH60-120 and 40-260A 28.00 (Note - Add PS1586) ZC E-4113 Manual operating handle shaft ZTS400-600 (horiz.type) 178.00 ZC E-4173 Manual operating handle shaft ZTS41 & ZBTS41-121 37.00 (Note - Add PS1586) ZC E-5123 Manual operating handle shaft ZTS160-300 98.50 (Note - Add PS2131) ZC F6-25RPL C Exerciser clock, 120V (solid state repl. assy for mechanical) ZC F6-26RPL C Exerciser clock, 208/240V (solid state repl. assy for mechanical) ZC F6-27RPL C Exerciser clock, 480V (solid state repl. -
Essentials of Machine Controls Safety Considerations
2013 National Robot Safety Conference Essentials of Machine Controls Safety Considerations Heinz E. Knackstedt TÜV Functional Safety Engineer C&E Sales, Inc. 677 Congress Park Drive Dayton Ohio 45459 Phone: (800) 228-2790 x112 Email: [email protected] Cell (937) 545-6494 Safety Circuit Design 13-10-14 page 1 2013 National Robot Safety Conference OBJECTIVE • Encourage participation and free discussions on the subject of application and design of the safety related parts of the control system • Identify the basic concepts which may be applied to any machine tool or assembly machine control based risk reduction, including robots and fluid power • Definition of risk reduction requirements • Review of the risk reduction circuit categories as defined by EN 954-1996, ISO 13849-1:1999 RIA 15.06:1999, ANSI B11.0 and B11.19 through the use of example circuits • Review control design basics as the backbone of the “new” ISO 13849-1:2006 Safety Circuit Design 13-10-14 page 2 2013 National Robot Safety Conference Overview • Design of safety circuits for robotic applications typically employ management of hazards from auxiliary equipment • Injury from robotic applications are frequently caused, not by the robot, but from this equipment • The risk assessment must identify all sources of harm, not only the robot • The risks from all hazards to which an individual can be exposed while attending the robot must also be reduced to an acceptable level • The principles and circuits discussed are generic and may be applied to safety control circuits regardless -
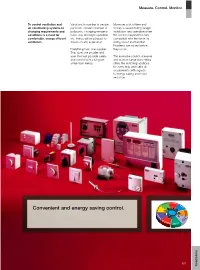
Convenient and Energy Saving Control
Measure. Control. Monitor. To control ventilation and Variations in number of people Moreover a lot of time and air conditioning systems to per room, different number of money is saved during design, changing requirements and pollutants, changing tempera - installation and operation when conditions is a must for tures, day and night operation the control equipment is fully comfortable, energy efficient etc. Helios will be pleased to compatible with the fan in its ventilation. advise on any application. wiring layout and function. Problems are solved before Everything from one supplier. they occur . That gives the installer and user the best possible safety The extensive control, measure and control with a full guar- and monitor range from Helios antee from Helios. offers the matching solutions for every task and fulfills all requirements with regards to energy saving and noise reduction. Convenient and energy saving control. s r e l l o r t n 397 o C Control. Adjust. Optimise. Task Helios controller solution Page Manual control of air I Manual speed controller flow volume – Without motor protection – 230 V, 1 ph. – Electronic, flush / surface mounted ES.., BSX 403 – 230 V, 1 ph. – Transformer, surface mounted TSW, TSSW 404 – 400 V, 3 ph. – Transformer, surface mounted TSD, TSSD 405 – 230 V, 1 ph. – Transformer, electronic, surface mounted ETW 406 – 400 V, 3 ph. – Frequency inverter FU.. 407 – With built-in motor full protection for connection to thermal contacts – 230 V, 1 ph. – Transformer, surface mounted MWS 404 – 400 V, 3 ph. – Transformer, surface mounted RDS 405 – 400 V, 3 ph. – Electronic, surface mounted ESD 406 I Operation switch for fans with 2 speeds – Pole switch for Dahlander windings, flush / surface mounted PDA / PDU 401 – Pole switch for separated windings, flush / surface mounted PGWA / PGWU 401 Radio electronic I Radio switching system Portable on / off switch for FSS Transmitter 400 alternating current fans. -

EC-3000/3400 Solid State Rotary Cam Limit Switch
EC-3000/3400 Solid State Rotary Cam Limit Switch Installation/Operation Manual 13647 Metric Road • Roscoe, IL 61073 815-389-2620 • FAX 815-389-3304 800-228-5487 (USA & Canada) Web Site: www.electrocam.com Copyright © 2000 - All Rights Reserved Neither this document nor any part may be reproduced or transmitted in any form or by any means without permission in writing from the publisher. , PLµS, SLIMLINE, and PLµSNET are all registered trademarks of Page 2 Electro Cam Corp. Table of Contents Safety and Preventive Maintenance ................................................................................................................. Page 3 Product Description .......................................................................................................................................... Page 4 Component Layout ........................................................................................................................................... Page 7 Installation Instructions ..................................................................................................................................... Page 9 Mounting Dimensions ....................................................................................................................................... Page 10 Mounting Dimensions NEMA 4X Units ............................................................................................................. Page 11 Output Wiring ................................................................................................................................................... -

Rotary Cam Based Punch Press Controls
B1 Rotary Cam Based Punch Press Controls www.pressroomelectronics.com Rotary Cam Based Punch Press Controls This platform of punch press controls utilizes a rotary cam limit switch with drive check for the machine’s position and timing signals. B2 Rotary Cam Based Punch Press Controls www.pressroomelectronics.com Rotary Cam Based Punch Press Controls Overview The Model 3200SS (Solid State) Control System is completely prewired and ready for installation. System supplied complete with a well marked terminal strip for easy, safe, and accurate electrical interface to the various punch press com- ponents. Due to the hybrid design characteristics of the 3200SS, a main power disconnect switch and magnetic motor starters can be supplied in the same control panel. Complies with section 1910.217 of the Federal Register and ANSI B11.1- 2009. Utilizes a rotary cam limit switch (shown) for the machine timing signals. All of the listed SSM products below meet or exceed 1910.217 of the Federal Register and ANSI B11.1-2009. Part Number Description SSM-05 3200SS (Boards Only) Clutch/Brake System with remote status display SSM-08 3200SS (Boards Only) Clutch/Brake System with remote status display, IEC switches, push buttons and legend plates SSM-10 3200SS control boards mounted on panel backplate with remote status display SSM-20 3200SS control boards mounted on panel backplate with remote status display, switches, push buttons 3200SS 3200SS control boards with NEMA12 (IP64) control panel with IEC switchgear 3200SS with 1500 Package 3200SS with NEMA12 (IP64) control panel with IEC switchgear and control package 1500 Control Package 1500 includes the following: No.