The Cubic and Quartic Equations in Intermediate Algebra Courses
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Diamond Method of Factoring a Quadratic Equation
The Diamond Method of Factoring a Quadratic Equation Important: Remember that the first step in any factoring is to look at each term and factor out the greatest common factor. For example: 3x2 + 6x + 12 = 3(x2 + 2x + 4) AND 5x2 + 10x = 5x(x + 2) If the leading coefficient is negative, always factor out the negative. For example: -2x2 - x + 1 = -1(2x2 + x - 1) = -(2x2 + x - 1) Using the Diamond Method: Example 1 2 Factor 2x + 11x + 15 using the Diamond Method. +30 Step 1: Multiply the coefficient of the x2 term (+2) and the constant (+15) and place this product (+30) in the top quarter of a large “X.” Step 2: Place the coefficient of the middle term in the bottom quarter of the +11 “X.” (+11) Step 3: List all factors of the number in the top quarter of the “X.” +30 (+1)(+30) (-1)(-30) (+2)(+15) (-2)(-15) (+3)(+10) (-3)(-10) (+5)(+6) (-5)(-6) +30 Step 4: Identify the two factors whose sum gives the number in the bottom quarter of the “x.” (5 ∙ 6 = 30 and 5 + 6 = 11) and place these factors in +5 +6 the left and right quarters of the “X” (order is not important). +11 Step 5: Break the middle term of the original trinomial into the sum of two terms formed using the right and left quarters of the “X.” That is, write the first term of the original equation, 2x2 , then write 11x as + 5x + 6x (the num bers from the “X”), and finally write the last term of the original equation, +15 , to get the following 4-term polynomial: 2x2 + 11x + 15 = 2x2 + 5x + 6x + 15 Step 6: Factor by Grouping: Group the first two terms together and the last two terms together. -

Solving Cubic Polynomials
Solving Cubic Polynomials 1.1 The general solution to the quadratic equation There are four steps to finding the zeroes of a quadratic polynomial. 1. First divide by the leading term, making the polynomial monic. a 2. Then, given x2 + a x + a , substitute x = y − 1 to obtain an equation without the linear term. 1 0 2 (This is the \depressed" equation.) 3. Solve then for y as a square root. (Remember to use both signs of the square root.) a 4. Once this is done, recover x using the fact that x = y − 1 . 2 For example, let's solve 2x2 + 7x − 15 = 0: First, we divide both sides by 2 to create an equation with leading term equal to one: 7 15 x2 + x − = 0: 2 2 a 7 Then replace x by x = y − 1 = y − to obtain: 2 4 169 y2 = 16 Solve for y: 13 13 y = or − 4 4 Then, solving back for x, we have 3 x = or − 5: 2 This method is equivalent to \completing the square" and is the steps taken in developing the much- memorized quadratic formula. For example, if the original equation is our \high school quadratic" ax2 + bx + c = 0 then the first step creates the equation b c x2 + x + = 0: a a b We then write x = y − and obtain, after simplifying, 2a b2 − 4ac y2 − = 0 4a2 so that p b2 − 4ac y = ± 2a and so p b b2 − 4ac x = − ± : 2a 2a 1 The solutions to this quadratic depend heavily on the value of b2 − 4ac. -

Math: Honors Geometry UNIT/Weeks (Not Timeline/Topics Essential Questions Consecutive)
Math: Honors Geometry UNIT/Weeks (not Timeline/Topics Essential Questions consecutive) Reasoning and Proof How can you make a Patterns and Inductive Reasoning conjecture and prove that it is Conditional Statements 2 true? Biconditionals Deductive Reasoning Reasoning in Algebra and Geometry Proving Angles Congruent Congruent Triangles How do you identify Congruent Figures corresponding parts of Triangle Congruence by SSS and SAS congruent triangles? Triangle Congruence by ASA and AAS How do you show that two 3 Using Corresponding Parts of Congruent triangles are congruent? Triangles How can you tell whether a Isosceles and Equilateral Triangles triangle is isosceles or Congruence in Right Triangles equilateral? Congruence in Overlapping Triangles Relationships Within Triangles Mid segments of Triangles How do you use coordinate Perpendicular and Angle Bisectors geometry to find relationships Bisectors in Triangles within triangles? 3 Medians and Altitudes How do you solve problems Indirect Proof that involve measurements of Inequalities in One Triangle triangles? Inequalities in Two Triangles How do you write indirect proofs? Polygons and Quadrilaterals How can you find the sum of The Polygon Angle-Sum Theorems the measures of polygon Properties of Parallelograms angles? Proving that a Quadrilateral is a Parallelogram How can you classify 3.2 Properties of Rhombuses, Rectangles and quadrilaterals? Squares How can you use coordinate Conditions for Rhombuses, Rectangles and geometry to prove general Squares -

Quadratic Equations Through History
Cal McKeever & Robert Bettinger COMMON CORE STANDARD 3B Choose and produce an equivalent form of an expression to reveal and explain properties of the quantity represented by the expression. Factor a quadratic expression to reveal the zeros of the function it defines. Complete the square in a quadratic expression to reveal the maximum or minimum value of the function it defines. SYNOPSIS At a summit of time-traveling historical mathematicians, attendees from Ancient Babylon pose the question of how to solve quadratic equations. Their method of completing the square serves their purposes, but there was far more to be done with this complex equation. Pythagoras, Euclid, Brahmagupta, Bhaskara II, Al-Khwarizmi and Descartes join the discussion, each pointing out their contributions to the contemporary understanding of solving quadratics through the quadratic formula. Through their discussion, the historical situation through which we understand the solving of quadratic equations is highlighted, showing the complex history of this formula taught everywhere. As the target audience for this project is high school students, the different characters of the script use language and symbolism that is anachronistic but will help the the students to understand the concepts that are discussed. For example, Diophantus did not use a,b,c in his actual texts but his fictional character in the the given script does explain his method of solving quadratics using contemporary notation. HISTORICAL BACKGROUND The problem of solving quadratic equations dates back to Babylonia in the 2nd Millennium BC. The Babylonian understanding of quadratics was used geometrically, to solve questions of area with real-world solutions. -
Quadratic Polynomials
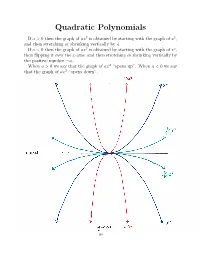
Quadratic Polynomials If a>0thenthegraphofax2 is obtained by starting with the graph of x2, and then stretching or shrinking vertically by a. If a<0thenthegraphofax2 is obtained by starting with the graph of x2, then flipping it over the x-axis, and then stretching or shrinking vertically by the positive number a. When a>0wesaythatthegraphof− ax2 “opens up”. When a<0wesay that the graph of ax2 “opens down”. I Cit i-a x-ax~S ~12 *************‘s-aXiS —10.? 148 2 If a, c, d and a = 0, then the graph of a(x + c) 2 + d is obtained by If a, c, d R and a = 0, then the graph of a(x + c)2 + d is obtained by 2 R 6 2 shiftingIf a, c, the d ⇥ graphR and ofaax=⇤ 2 0,horizontally then the graph by c, and of a vertically(x + c) + byd dis. obtained (Remember by shiftingshifting the the⇥ graph graph of of axax⇤ 2 horizontallyhorizontally by by cc,, and and vertically vertically by by dd.. (Remember (Remember thatthatd>d>0meansmovingup,0meansmovingup,d<d<0meansmovingdown,0meansmovingdown,c>c>0meansmoving0meansmoving thatleft,andd>c<0meansmovingup,0meansmovingd<right0meansmovingdown,.) c>0meansmoving leftleft,and,andc<c<0meansmoving0meansmovingrightright.).) 2 If a =0,thegraphofafunctionf(x)=a(x + c) 2+ d is called a parabola. If a =0,thegraphofafunctionf(x)=a(x + c)2 + d is called a parabola. 6 2 TheIf a point=0,thegraphofafunction⇤ ( c, d) 2 is called thefvertex(x)=aof(x the+ c parabola.) + d is called a parabola. The point⇤ ( c, d) R2 is called the vertex of the parabola. -

Quadratic Equations
Lecture 26 Quadratic Equations Quadraticpolynomials ................................ ....................... 2 Quadraticpolynomials ................................ ....................... 3 Quadraticequations and theirroots . .. .. .. .. .. .. .. .. .. ........................ 4 How to solve a binomial quadratic equation. ......................... 5 Solutioninsimplestradicalform ........................ ........................ 6 Quadraticequationswithnoroots........................ ....................... 7 Solving binomial equations by factoring. ........................... 8 Don’tloseroots!..................................... ...................... 9 Summary............................................. .................. 10 i Quadratic polynomials A quadratic polynomial is a polynomial of degree two. It can be written in the standard form ax2 + bx + c , where x is a variable, a, b, c are constants (numbers) and a = 0 . 6 The constants a, b, c are called the coefficients of the polynomial. Example 1 (quadratic polynomials). 4 4 3x2 + x ( a = 3, b = 1, c = ) − − 5 − −5 x2 ( a = 1, b = c = 0 ) x2 1 5x + √2 ( a = , b = 5, c = √2 ) 7 − 7 − 4x(x + 1) x (this is a quadratic polynomial which is not written in the standard form. − 2 Its standard form is 4x + 3x , where a = 4, b = 3, c = 0 ) 2 / 10 Quadratic polynomials Example 2 (polynomials, but not quadratic) x3 2x + 1 (this is a polynomial of degree 3 , not 2 ) − 3x 2 (this is a polynomial of degree 1 , not 2 ) − Example 3 (not polynomials) 2 1 1 x + x 2 + 1 , x are not polynomials − x A quadratic polynomial ax2 + bx + c is called sometimes a quadratic trinomial. A trinomial consists of three terms. Quadratic polynomials of type ax2 + bx or ax2 + c are called quadratic binomials. A binomial consists of two terms. Quadratic polynomials of type ax2 are called quadratic monomials. A monomial consists of one term. Quadratic polynomials (together with polynomials of degree 1 and 0 ) are the simplest polynomials. -

The Evolution of Equation-Solving: Linear, Quadratic, and Cubic
California State University, San Bernardino CSUSB ScholarWorks Theses Digitization Project John M. Pfau Library 2006 The evolution of equation-solving: Linear, quadratic, and cubic Annabelle Louise Porter Follow this and additional works at: https://scholarworks.lib.csusb.edu/etd-project Part of the Mathematics Commons Recommended Citation Porter, Annabelle Louise, "The evolution of equation-solving: Linear, quadratic, and cubic" (2006). Theses Digitization Project. 3069. https://scholarworks.lib.csusb.edu/etd-project/3069 This Thesis is brought to you for free and open access by the John M. Pfau Library at CSUSB ScholarWorks. It has been accepted for inclusion in Theses Digitization Project by an authorized administrator of CSUSB ScholarWorks. For more information, please contact [email protected]. THE EVOLUTION OF EQUATION-SOLVING LINEAR, QUADRATIC, AND CUBIC A Project Presented to the Faculty of California State University, San Bernardino In Partial Fulfillment of the Requirements for the Degre Master of Arts in Teaching: Mathematics by Annabelle Louise Porter June 2006 THE EVOLUTION OF EQUATION-SOLVING: LINEAR, QUADRATIC, AND CUBIC A Project Presented to the Faculty of California State University, San Bernardino by Annabelle Louise Porter June 2006 Approved by: Shawnee McMurran, Committee Chair Date Laura Wallace, Committee Member , (Committee Member Peter Williams, Chair Davida Fischman Department of Mathematics MAT Coordinator Department of Mathematics ABSTRACT Algebra and algebraic thinking have been cornerstones of problem solving in many different cultures over time. Since ancient times, algebra has been used and developed in cultures around the world, and has undergone quite a bit of transformation. This paper is intended as a professional developmental tool to help secondary algebra teachers understand the concepts underlying the algorithms we use, how these algorithms developed, and why they work. -

How to Graphically Interpret the Complex Roots of a Quadratic Equation
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln MAT Exam Expository Papers Math in the Middle Institute Partnership 7-2007 How to Graphically Interpret the Complex Roots of a Quadratic Equation Carmen Melliger University of Nebraska-Lincoln Follow this and additional works at: https://digitalcommons.unl.edu/mathmidexppap Part of the Science and Mathematics Education Commons Melliger, Carmen, "How to Graphically Interpret the Complex Roots of a Quadratic Equation" (2007). MAT Exam Expository Papers. 35. https://digitalcommons.unl.edu/mathmidexppap/35 This Article is brought to you for free and open access by the Math in the Middle Institute Partnership at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in MAT Exam Expository Papers by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. Master of Arts in Teaching (MAT) Masters Exam Carmen Melliger In partial fulfillment of the requirements for the Master of Arts in Teaching with a Specialization in the Teaching of Middle Level Mathematics in the Department of Mathematics. David Fowler, Advisor July 2007 How to Graphically Interpret the Complex Roots of a Quadratic Equation Carmen Melliger July 2007 How to Graphically Interpret the Complex Roots of a Quadratic Equation As a secondary math teacher I have taught my students to find the roots of a quadratic equation in several ways. One of these ways is to graphically look at the quadratic and see were it crosses the x-axis. For example, the equation of y = x2 – x – 2, as shown in Figure 1, has roots at x = -1 and x = 2. These are the two places in which the sketched graph crosses the x-axis. -

Mathematics Algebra I
COPPELL ISD MATHEMATICS YEAR-AT-A-GLANCE MATHEMATICS ALGEBRA I Program Transfer Goals ● Use a problem-solving model that incorporates analyzing given information, formulating a plan or strategy, determining a solution, justifying the solution, and evaluating the problem-solving process and the reasonableness of the solution. ● Select tools, including real objects, manipulatives, paper and pencil, and technology as appropriate, and techniques, including mental math, estimation, and number sense as appropriate, to solve problems. ● Communicate mathematical ideas, reasoning, and their implications using multiple representations, including symbols, diagrams, graphs, and language as appropriate. ● Display, explain, and justify mathematical ideas and arguments using precise mathematical language in written or oral communication. PACING First Grading Period Second Grading Period Third Grading Period Fourth Grading Period Unit 1: Unit 2: Unit 3: Unit 4: Unit 5: Unit 6: Unit 7: Unit 8: Unit 9: Unit 10: Unit 11: Unit 12: Solving One Attributes Sequences Attributes of Writing Systems of Operations Factori Attribute -

Equation Solving in Indian Mathematics
U.U.D.M. Project Report 2018:27 Equation Solving in Indian Mathematics Rania Al Homsi Examensarbete i matematik, 15 hp Handledare: Veronica Crispin Quinonez Examinator: Martin Herschend Juni 2018 Department of Mathematics Uppsala University Equation Solving in Indian Mathematics Rania Al Homsi “We owe a lot to the ancient Indians teaching us how to count. Without which most modern scientific discoveries would have been impossible” Albert Einstein Sammanfattning Matematik i antika och medeltida Indien har påverkat utvecklingen av modern matematik signifi- kant. Vissa människor vet de matematiska prestationer som har sitt urspring i Indien och har haft djupgående inverkan på matematiska världen, medan andra gör det inte. Ekvationer var ett av de områden som indiska lärda var mycket intresserade av. Vad är de viktigaste indiska bidrag i mate- matik? Hur kunde de indiska matematikerna lösa matematiska problem samt ekvationer? Indiska matematiker uppfann geniala metoder för att hitta lösningar för ekvationer av första graden med en eller flera okända. De studerade också ekvationer av andra graden och hittade heltalslösningar för dem. Denna uppsats presenterar en litteraturstudie om indisk matematik. Den ger en kort översyn om ma- tematikens historia i Indien under många hundra år och handlar om de olika indiska metoderna för att lösa olika typer av ekvationer. Uppsatsen kommer att delas in i fyra avsnitt: 1) Kvadratisk och kubisk extraktion av Aryabhata 2) Kuttaka av Aryabhata för att lösa den linjära ekvationen på formen 푐 = 푎푥 + 푏푦 3) Bhavana-metoden av Brahmagupta för att lösa kvadratisk ekvation på formen 퐷푥2 + 1 = 푦2 4) Chakravala-metoden som är en annan metod av Bhaskara och Jayadeva för att lösa kvadratisk ekvation 퐷푥2 + 1 = 푦2. -

Building Students' Understanding of Quadratic Equation Concept Using
BUILDING STUDENTS’ UNDERSTANDING OF QUADRATIC EQUATION CONCEPT USING NAÏVE GEOMETRY Achmad Dhany Fachrudin1, Ratu Ilma Indra Putri2, Darmawijoyo2 1Graduate Student of Bilingual Master Program on Mathematics Education Sriwijaya University, Jalan Padang Selasa No. 524, Palembang-30139, Indonesia 2Sriwijaya University, Jalan Padang Selasa No. 524, Palembang-30139, Indonesia e-mail: [email protected] Abstract The purpose of this research is to know how Naïve Geometry method can support students’ understanding about the concept of solving quadratic equations. In this article we will discuss one activities of the four activities we developed. This activity focused on how students linking the Naïve Geometry method with the solving of the quadratic equation especially on how student bring geometric solution into algebraic form. This research was conducted in SMP Negeri 1 Palembang. Design research was chosen as method used in this research that have three main phases. The results of this research showed that manipulating and reshaping the rectangle into square could stimulate students to acquire the idea of solving quadratic equations using completing perfect square method. In the end of the meeting, students are also guided to reinvent the general formula to solve quadratic equations. Keywords: Quadratic Equations, Design Research, Naïve Geometry, PMRI Abstrak. Tujuan dari penelitian ini adalah untuk mengetahui bagaimana metode Naïve Geometri dapat membantu pemahaman siswa tentang konsep penyelesaian persamaan kuadrat. Pada artikel ini akan dibahas salah satu aktivitas dari empat kegiatan yang kami kembangkan. Kegiatan ini berfokus pada bagaimana siswa mengaitkan metode Naïve Geometri dengan penyelesaian persamaan kuadrat. Penelitian dilaksanakan di SMP Negeri 1 Palembang. Metode penelitian yang digunakan dalam penelitian ini adalah desain riset yang dilakukan melalui 3 tahap utama. -

Algebra I: Unit 3 Exponential Functions, Quadratic Functions, & Polynomials
MATHEMATICS Algebra I: Unit 3 Exponential Functions, Quadratic Functions, & Polynomials 1 | P a g e Board Approved 08.18.21 Course Philosophy/Description The fundamental purpose of Algebra 1 is to formalize and extend the mathematics that students learned in the elementary and middle grades. The Standards for Mathematical Practice apply throughout each course, and, together with the New Jersey Student Learning Standards, prescribe that students experience mathematics as a coherent, useful, and logical subject that makes use of their ability to make sense of problem situations. Conceptual knowledge behind the mathematics is emphasized. Algebra I provides a formal development of the algebraic skills and concepts necessary for students to succeed in advanced courses as well as the PARCC. The course also provides opportunities for the students to enhance the skills needed to become college and career ready. The content shall include, but not be limited to, perform set operations, use fundamental concepts of logic including Venn diagrams, describe the concept of a function, use function notation, solve real-world problems involving relations and functions, determine the domain and range of relations and functions, simplify algebraic expressions, solve linear and literal equations, solve and graph simple and compound inequalities, solve linear equations and inequalities in real-world situations, rewrite equations of a line into slope-intercept form and standard form, graph a line given any variation of information, determine the slope, x- and