Modulation and Demodulation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Toward a Large Bandwidth Photonic Correlator for Infrared Heterodyne Interferometry a first Laboratory Proof of Concept
A&A 639, A53 (2020) Astronomy https://doi.org/10.1051/0004-6361/201937368 & c G. Bourdarot et al. 2020 Astrophysics Toward a large bandwidth photonic correlator for infrared heterodyne interferometry A first laboratory proof of concept G. Bourdarot1,2, H. Guillet de Chatellus2, and J-P. Berger1 1 Univ. Grenoble Alpes, CNRS, IPAG, 38000 Grenoble, France e-mail: [email protected] 2 Univ. Grenoble Alpes, CNRS, LIPHY, 38000 Grenoble, France Received 19 December 2019 / Accepted 17 May 2020 ABSTRACT Context. Infrared heterodyne interferometry has been proposed as a practical alternative for recombining a large number of telescopes over kilometric baselines in the mid-infrared. However, the current limited correlation capacities impose strong restrictions on the sen- sitivity of this appealing technique. Aims. In this paper, we propose to address the problem of transport and correlation of wide-bandwidth signals over kilometric dis- tances by introducing photonic processing in infrared heterodyne interferometry. Methods. We describe the architecture of a photonic double-sideband correlator for two telescopes, along with the experimental demonstration of this concept on a proof-of-principle test bed. Results. We demonstrate the a posteriori correlation of two infrared signals previously generated on a two-telescope simulator in a double-sideband photonic correlator. A degradation of the signal-to-noise ratio of 13%, equivalent to a noise factor NF = 1:15, is obtained through the correlator, and the temporal coherence properties of our input signals are retrieved from these measurements. Conclusions. Our results demonstrate that photonic processing can be used to correlate heterodyne signals with a potentially large increase of detection bandwidth. -

Loudspeaker FM and AM Distortion an 10
Loudspeaker FM and AM Distortion AN 10 Application Note to the KLIPPEL R&D SYSTEM The amplitude modulation of a high frequency tone f1 (voice tone) and a low frequency tone f2 (bass tone) is measured by using the 3D Distortion Measurement module (DIS) of the KLIPPEL R&D SYSTEM. The maximal variation of the envelope of the voice tone f1 is represented by the top and bottom value referred to the averaged envelope. The amplitude modulation distortion (AMD) is the ratio between the rms value of the variation referred to the averaged value and is comparable to the modulation distortion Ld2 and Ld3 of the IEC standard 60268 provided that the loudspeaker generates pure amplitude modulation of second- or third-order. The measurement of amplitude modulation distortion (AMD) allows assessment of the effects of Bl(x) and Le(x) nonlinearity and radiation distortion due to pure amplitude modulation without Doppler effect. CONTENTS: 1 Method of Measurement ............................................................................................................................... 2 2 Checklist for dominant modulation distortion ............................................................................................... 3 3 Using the 3D distortion measurement (DIS) .................................................................................................. 4 4 Setup parameters for DIS Module .................................................................................................................. 4 5 Example ......................................................................................................................................................... -

3 Characterization of Communication Signals and Systems
63 3 Characterization of Communication Signals and Systems 3.1 Representation of Bandpass Signals and Systems Narrowband communication signals are often transmitted using some type of carrier modulation. The resulting transmit signal s(t) has passband character, i.e., the bandwidth B of its spectrum S(f) = s(t) is much smaller F{ } than the carrier frequency fc. S(f) B f f f − c c We are interested in a representation for s(t) that is independent of the carrier frequency fc. This will lead us to the so–called equiv- alent (complex) baseband representation of signals and systems. Schober: Signal Detection and Estimation 64 3.1.1 Equivalent Complex Baseband Representation of Band- pass Signals Given: Real–valued bandpass signal s(t) with spectrum S(f) = s(t) F{ } Analytic Signal s+(t) In our quest to find the equivalent baseband representation of s(t), we first suppress all negative frequencies in S(f), since S(f) = S( f) is valid. − The spectrum S+(f) of the resulting so–called analytic signal s+(t) is defined as S (f) = s (t) =2 u(f)S(f), + F{ + } where u(f) is the unit step function 0, f < 0 u(f) = 1/2, f =0 . 1, f > 0 u(f) 1 1/2 f Schober: Signal Detection and Estimation 65 The analytic signal can be expressed as 1 s+(t) = − S+(f) F 1{ } = − 2 u(f)S(f) F 1{ } 1 = − 2 u(f) − S(f) F { } ∗ F { } 1 The inverse Fourier transform of − 2 u(f) is given by F { } 1 j − 2 u(f) = δ(t) + . -

Army Radio Communication in the Great War Keith R Thrower, OBE
Army radio communication in the Great War Keith R Thrower, OBE Introduction Prior to the outbreak of WW1 in August 1914 many of the techniques to be used in later years for radio communications had already been invented, although most were still at an early stage of practical application. Radio transmitters at that time were predominantly using spark discharge from a high voltage induction coil, which created a series of damped oscillations in an associated tuned circuit at the rate of the spark discharge. The transmitted signal was noisy and rich in harmonics and spread widely over the radio spectrum. The ideal transmission was a continuous wave (CW) and there were three methods for producing this: 1. From an HF alternator, the practical design of which was made by the US General Electric engineer Ernst Alexanderson, initially based on a specification by Reginald Fessenden. These alternators were primarily intended for high-power, long-wave transmission and not suitable for use on the battlefield. 2. Arc generator, the practical form of which was invented by Valdemar Poulsen in 1902. Again the transmitters were high power and not suitable for battlefield use. 3. Valve oscillator, which was invented by the German engineer, Alexander Meissner, and patented in April 1913. Several important circuits using valves had been produced by 1914. These include: (a) the heterodyne, an oscillator circuit used to mix with an incoming continuous wave signal and beat it down to an audible note; (b) the detector, to extract the audio signal from the high frequency carrier; (c) the amplifier, both for the incoming high frequency signal and the detected audio or the beat signal from the heterodyne receiver; (d) regenerative feedback from the output of the detector or RF amplifier to its input, which had the effect of sharpening the tuning and increasing the amplification. -

Degree Project
Degree project Performance of MLSE over Fading Channels Author: Aftab Ahmad Date: 2013-05-31 Subject: Electrical Engineering Level: Master Level Course code: 5ED06E To my parents, family, siblings, friends and teachers 1 Research is what I'm doing when I don't know what I'm doing1 Wernher Von Braun 1Brown, James Dean, and Theodore S. Rodgers. Doing Second Language Research: An introduction to the theory and practice of second language research for graduate/Master's students in TESOL and Applied Linguistics, and others. OUP Oxford, 2002. 2 Abstract This work examines the performance of a wireless transceiver system. The environment is indoor channel simulated by Rayleigh and Rician fading channels. The modulation scheme implemented is GMSK in the transmitter. In the receiver the Viterbi MLSE is implemented to cancel noise and interference due to the filtering and the channel. The BER against the SNR is analyzed in this thesis. The waterfall curves are compared for two data rates of 1 M bps and 2 Mbps over both the Rayleigh and Rician fading channels. 3 Acknowledgments I would like to thank Prof. Sven Nordebo for his supervision, valuable time and advices and support during this thesis work. I would like to thank Prof. Sven-Eric Sandstr¨om.Iwould also like to thank Sweden and Denmark for giving me an opportunity to study in this education system and experience the Scandinavian life and culture. I must mention my gratitude to Sohail Atif, javvad ur Rehman, Ahmed Zeeshan and all the rest of my buddies that helped me when i most needed it. -

Bit & Baud Rate
What’s The Difference Between Bit Rate And Baud Rate? Apr. 27, 2012 Lou Frenzel | Electronic Design Serial-data speed is usually stated in terms of bit rate. However, another oft- quoted measure of speed is baud rate. Though the two aren’t the same, similarities exist under some circumstances. This tutorial will make the difference clear. Table Of Contents Background Bit Rate Overhead Baud Rate Multilevel Modulation Why Multiple Bits Per Baud? Baud Rate Examples References Background Most data communications over networks occurs via serial-data transmission. Data bits transmit one at a time over some communications channel, such as a cable or a wireless path. Figure 1 typifies the digital-bit pattern from a computer or some other digital circuit. This data signal is often called the baseband signal. The data switches between two voltage levels, such as +3 V for a binary 1 and +0.2 V for a binary 0. Other binary levels are also used. In the non-return-to-zero (NRZ) format (Fig. 1, again), the signal never goes to zero as like that of return- to-zero (RZ) formatted signals. 1. Non-return to zero (NRZ) is the most common binary data format. Data rate is indicated in bits per second (bits/s). Bit Rate The speed of the data is expressed in bits per second (bits/s or bps). The data rate R is a function of the duration of the bit or bit time (TB) (Fig. 1, again): R = 1/TB Rate is also called channel capacity C. If the bit time is 10 ns, the data rate equals: R = 1/10 x 10–9 = 100 million bits/s This is usually expressed as 100 Mbits/s. -
Digital Audio Broadcasting : Principles and Applications of Digital Radio
Digital Audio Broadcasting Principles and Applications of Digital Radio Second Edition Edited by WOLFGANG HOEG Berlin, Germany and THOMAS LAUTERBACH University of Applied Sciences, Nuernberg, Germany Digital Audio Broadcasting Digital Audio Broadcasting Principles and Applications of Digital Radio Second Edition Edited by WOLFGANG HOEG Berlin, Germany and THOMAS LAUTERBACH University of Applied Sciences, Nuernberg, Germany Copyright ß 2003 John Wiley & Sons Ltd, The Atrium, Southern Gate, Chichester, West Sussex PO19 8SQ, England Telephone (þ44) 1243 779777 Email (for orders and customer service enquiries): [email protected] Visit our Home Page on www.wileyeurope.com or www.wiley.com All Rights Reserved. No part of this publication may be reproduced, stored in a retrieval system or transmitted in any form or by any means, electronic, mechanical, photocopying, recording, scanning or otherwise, except under the terms of the Copyright, Designs and Patents Act 1988 or under the terms of a licence issued by the Copyright Licensing Agency Ltd, 90 Tottenham Court Road, London W1T 4LP, UK, without the permission in writing of the Publisher. Requests to the Publisher should be addressed to the Permissions Department, John Wiley & Sons Ltd, The Atrium, Southern Gate, Chichester, West Sussex PO19 8SQ, England, or emailed to [email protected], or faxed to (þ44) 1243 770571. This publication is designed to provide accurate and authoritative information in regard to the subject matter covered. It is sold on the understanding that the Publisher is not engaged in rendering professional services. If professional advice or other expert assistance is required, the services of a competent professional should be sought. -

Application of 4K-QAM, LDPC and OFDM for Gbps Data Rates Over HFC Plant David John Urban Comcast
Application of 4K-QAM, LDPC and OFDM for Gbps Data Rates over HFC Plant David John Urban Comcast Abstract Higher spectral density requires mapping more bits into a symbol at the expense of a This paper describes the application of higher signal to noise ratio (SNR) threshold. 4096-QAM, low density parity check codes The new physical layer will map 12 bits per (LDPC), and orthogonal frequency division symbol on the downstream compared to the 8 multiplexing (OFDM) to transmission over a bits per symbol used in DOCSIS 3.0. 4K- hybrid fiber coaxial cable plant (HFC). These QAM (or 4096-QAM) is a modulation techniques enable data rates of several Gbps. technique that has 4,096 points in the constellation diagram and each point is A complete derivation of the equations mapped to 12 bits. The new physical layer used for log domain sum product LDPC will map 10 bits per symbol using 1024-QAM decoding is provided. The reasons for (or 1K-QAM) on the upstream compared to 6 selecting OFDM and 4K-QAM are described. bits per symbol with 64-QAM used in Analysis of performance in the presence of DOCSIS 3.0. noise taken from field measurements is made. INCREASING SPECTRAL EFFICIENCY INTRODUCTION The three key methods for increasing the A new physical layer is being developed for spectral efficiency of the HFC plant in the transmission of data over a HFC cable plant. new physical layer are LDPC, OFDM and The objective is to increase the HFC plant 4K-QAM. LDPC is a very efficient coding capacity. -
History of Radio Broadcasting in Montana
University of Montana ScholarWorks at University of Montana Graduate Student Theses, Dissertations, & Professional Papers Graduate School 1963 History of radio broadcasting in Montana Ron P. Richards The University of Montana Follow this and additional works at: https://scholarworks.umt.edu/etd Let us know how access to this document benefits ou.y Recommended Citation Richards, Ron P., "History of radio broadcasting in Montana" (1963). Graduate Student Theses, Dissertations, & Professional Papers. 5869. https://scholarworks.umt.edu/etd/5869 This Thesis is brought to you for free and open access by the Graduate School at ScholarWorks at University of Montana. It has been accepted for inclusion in Graduate Student Theses, Dissertations, & Professional Papers by an authorized administrator of ScholarWorks at University of Montana. For more information, please contact [email protected]. THE HISTORY OF RADIO BROADCASTING IN MONTANA ty RON P. RICHARDS B. A. in Journalism Montana State University, 1959 Presented in partial fulfillment of the requirements for the degree of Master of Arts in Journalism MONTANA STATE UNIVERSITY 1963 Approved by: Chairman, Board of Examiners Dean, Graduate School Date Reproduced with permission of the copyright owner. Further reproduction prohibited without permission. UMI Number; EP36670 All rights reserved INFORMATION TO ALL USERS The quality of this reproduction is dependent upon the quality of the copy submitted. In the unlikely event that the author did not send a complete manuscript and there are missing pages, these will be noted. Also, if material had to be removed, a note will indicate the deletion. UMT Oiuartation PVUithing UMI EP36670 Published by ProQuest LLC (2013). -

Lecture 25 Demodulation and the Superheterodyne Receiver EE445-10
EE447 Lecture 6 Lecture 25 Demodulation and the Superheterodyne Receiver EE445-10 HW7;5-4,5-7,5-13a-d,5-23,5-31 Due next Monday, 29th 1 Figure 4–29 Superheterodyne receiver. m(t) 2 Couch, Digital and Analog Communication Systems, Seventh Edition ©2007 Pearson Education, Inc. All rights reserved. 0-13-142492-0 1 EE447 Lecture 6 Synchronous Demodulation s(t) LPF m(t) 2Cos(2πfct) •Only method for DSB-SC, USB-SC, LSB-SC •AM with carrier •Envelope Detection – Input SNR >~10 dB required •Synchronous Detection – (no threshold effect) •Note the 2 on the LO normalizes the output amplitude 3 Figure 4–24 PLL used for coherent detection of AM. 4 Couch, Digital and Analog Communication Systems, Seventh Edition ©2007 Pearson Education, Inc. All rights reserved. 0-13-142492-0 2 EE447 Lecture 6 Envelope Detector C • Ac • (1+ a • m(t)) Where C is a constant C • Ac • a • m(t)) 5 Envelope Detector Distortion Hi Frequency m(t) Slope overload IF Frequency Present in Output signal 6 3 EE447 Lecture 6 Superheterodyne Receiver EE445-09 7 8 4 EE447 Lecture 6 9 Super-Heterodyne AM Receiver 10 5 EE447 Lecture 6 Super-Heterodyne AM Receiver 11 RF Filter • Provides Image Rejection fimage=fLO+fif • Reduces amplitude of interfering signals far from the carrier frequency • Reduces the amount of LO signal that radiates from the Antenna stop 2/22 12 6 EE447 Lecture 6 Figure 4–30 Spectra of signals and transfer function of an RF amplifier in a superheterodyne receiver. 13 Couch, Digital and Analog Communication Systems, Seventh Edition ©2007 Pearson Education, Inc. -
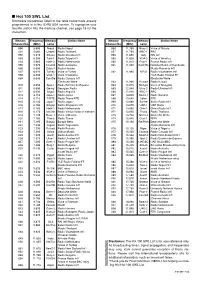
Hot 100 SWL List Shortwave Frequencies Listed in the Table Below Have Already Programmed in to the IC-R5 USA Version
I Hot 100 SWL List Shortwave frequencies listed in the table below have already programmed in to the IC-R5 USA version. To reprogram your favorite station into the memory channel, see page 16 for the instruction. Memory Frequency Memory Station Name Memory Frequency Memory Station Name Channel No. (MHz) name Channel No. (MHz) name 000 5.005 Nepal Radio Nepal 056 11.750 Russ-2 Voice of Russia 001 5.060 Uzbeki Radio Tashkent 057 11.765 BBC-1 BBC 002 5.915 Slovak Radio Slovakia Int’l 058 11.800 Italy RAI Int’l 003 5.950 Taiw-1 Radio Taipei Int’l 059 11.825 VOA-3 Voice of America 004 5.965 Neth-3 Radio Netherlands 060 11.910 Fran-1 France Radio Int’l 005 5.975 Columb Radio Autentica 061 11.940 Cam/Ro National Radio of Cambodia 006 6.000 Cuba-1 Radio Havana /Radio Romania Int’l 007 6.020 Turkey Voice of Turkey 062 11.985 B/F/G Radio Vlaanderen Int’l 008 6.035 VOA-1 Voice of America /YLE Radio Finland FF 009 6.040 Can/Ge Radio Canada Int’l /Deutsche Welle /Deutsche Welle 063 11.990 Kuwait Radio Kuwait 010 6.055 Spai-1 Radio Exterior de Espana 064 12.015 Mongol Voice of Mongolia 011 6.080 Georgi Georgian Radio 065 12.040 Ukra-2 Radio Ukraine Int’l 012 6.090 Anguil Radio Anguilla 066 12.095 BBC-2 BBC 013 6.110 Japa-1 Radio Japan 067 13.625 Swed-1 Radio Sweden 014 6.115 Ti/RTE Radio Tirana/RTE 068 13.640 Irelan RTE 015 6.145 Japa-2 Radio Japan 069 13.660 Switze Swiss Radio Int’l 016 6.150 Singap Radio Singapore Int’l 070 13.675 UAE-1 UAE Radio 017 6.165 Neth-1 Radio Netherlands 071 13.680 Chin-1 China Radio Int’l 018 6.175 Ma/Vie Radio Vilnius/Voice -

2 the Wireless Channel
CHAPTER 2 The wireless channel A good understanding of the wireless channel, its key physical parameters and the modeling issues, lays the foundation for the rest of the book. This is the goal of this chapter. A defining characteristic of the mobile wireless channel is the variations of the channel strength over time and over frequency. The variations can be roughly divided into two types (Figure 2.1): • Large-scale fading, due to path loss of signal as a function of distance and shadowing by large objects such as buildings and hills. This occurs as the mobile moves through a distance of the order of the cell size, and is typically frequency independent. • Small-scale fading, due to the constructive and destructive interference of the multiple signal paths between the transmitter and receiver. This occurs at the spatialscaleoftheorderofthecarrierwavelength,andisfrequencydependent. We will talk about both types of fading in this chapter, but with more emphasis on the latter. Large-scale fading is more relevant to issues such as cell-site planning. Small-scale multipath fading is more relevant to the design of reliable and efficient communication systems – the focus of this book. We start with the physical modeling of the wireless channel in terms of elec- tromagnetic waves. We then derive an input/output linear time-varying model for the channel, and define some important physical parameters. Finally, we introduce a few statistical models of the channel variation over time and over frequency. 2.1 Physical modeling for wireless channels Wireless channels operate through electromagnetic radiation from the trans- mitter to the receiver.