Dyadic Route Planning and Navigation in Collaborative Wayfinding Crystal J
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

RELIGIOUS BELIEFS COMPENSATE for PURPOSE When
RELIGIOUS BELIEFS COMPENSATE FOR PURPOSE 1 When God is your only friend: Religious beliefs compensate for purpose in life in the socially disconnected Todd Chan, Nicholas Michalak, & Oscar Ybarra Department of Psychology University of Michigan 530 Church St., Ann Arbor, MI, 48109-1043 Author notes Data and materials are available at osf.io/h6wuv. Corresponding Author: Todd Chan ([email protected]) RELIGIOUS BELIEFS COMPENSATE FOR PURPOSE 2 Abstract Objective: Social relationships supply purpose to life. How can socially disconnected people, who show lower levels of purpose, compensate for purpose in life? We propose that religious beliefs can compensate for the purpose in life that social relationships would otherwise provide, through (a) providing greater purpose to turn to, and (b) providing divine figures that can substitute for social relationships. Method: In three studies, we analyze three nationally representative and longitudinal datasets (N = 19775) using moderated regression and cross- lagged panel analyses. Results: Consistent with our hypotheses, religious beliefs were of minimal influence on purpose in life for socially connected individuals, who already held higher levels of purpose than socially disconnected individuals. However, for socially disconnected individuals, being highly religious predicted higher levels of purpose in life. Conclusions: Results suggest that although people primarily derive purpose from social relationships, socially disconnected individuals may leverage their religious beliefs for purpose and social comfort until they can reconnect. Keywords: religion; loneliness; social disconnection; interpersonal relationships; purpose RELIGIOUS BELIEFS COMPENSATE FOR PURPOSE 3 When God is your only friend: Religious beliefs compensate for purpose in life in the socially disconnected Purpose drives people forward. To have purpose means people feel that their life consists of plans, goals, and direction that make life worth living (Reker, Peacock, & Wong, 1987). -

Prosopagnosia with Topographical Difficulties 1
CORE Metadata, citation and similar papers at core.ac.uk Provided by Bournemouth University Research Online Prosopagnosia with topographical difficulties 1 Running Head: PROSOPAGNOSIA WITH TOPOGRAPHICAL DIFFICULTIES Developmental Prosopagnosia with Concurrent Topographical Difficulties: A Case Report and Virtual Reality Training Programme Sarah Bate, Amanda Adams, Rachel Bennetts & Hannah Line Department of Psychology, Bournemouth University, UK Word count: 6858 Address for correspondence: Dr Sarah Bate Department of Psychology Faculty of Science and Technology Poole House Bournemouth University Fern Barrow Poole BH12 5BB United Kingdom Telephone: +44 (0) 1202 961918 Fax: +44 (0) 1202 965314 Email: [email protected] Prosopagnosia with topographical difficulties 2 Abstract Several neuropsychological case studies report brain-damaged individuals with concurrent impairments in face recognition (i.e. prosopagnosia) and topographical orientation. Recently, individuals with a developmental form of topographical disorientation have also been described, and several case reports of individuals with developmental prosopagnosia provide anecdotal evidence of concurrent navigational difficulties. Clearly, the co-occurrence of these difficulties can exacerbate the negative psychosocial consequences associated with each condition. This paper presents the first detailed case report of an individual (FN) with developmental prosopagnosia alongside difficulties in topographical orientation. FN’s performance on an extensive navigational battery indicated -
Silva Manual- Mirror Sighting Compasses
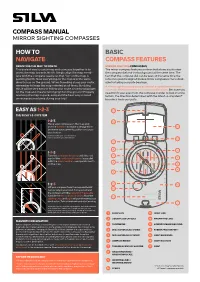
COMPASSHOW MANUAL TO MIRROR SIGHTING COMPASSES NAVIGATEHOW TO BASIC NAVIGATE COMPASS FEATURES HOWORIENTING TO THE MAP TO NORTH MIRROR SIGHTING COMPASSES EASYThe easiest way to use a map and compass AS together is to The mirror compass features a mirror that allows you to view orient the map towards North. Simply align the map merid- the compass dial and the background at the same time. The ians with the compass needle so that “up” on the map is fact that the compass dial can be seen at the same time the pointing North. Now everything on the map is in the same reference point is aligned makes mirror compasses more desir- NAVIGATEdirection as on the ground. When travelling along your route, able for taking accurate bearings. remember to keep the map oriented at all times. By doing A mirror-sighting compass is at its best in open terrain where 1-2-3this it will be very easy to follow your route since turning right you must determine direction over long distances. Because you on the map also means turning right on the ground! Properly needn’t lift your eyes from the compass in order to look into the orienting1-2-3 the map is quick, easy1-2 and-3 the best way to avoid1-2- 3 terrain, the direction determined with the Silva 1-2-3 System® HOW TOunnecessaryPlace your compass mistakes on the map duringTurn your the compass trip! housing until the Lift your compass frombecomes the map more accurate. and use the baseline to make a red part of the north/south arrow and hold it horizontally in your EASYstraight line between AS your current is parallel with the map meridians, hand. -

Environmental Geocaching: Learning Through Nature and Technology
WSFNR-20-67A September 2020 ENVIRONMENTAL GEOCACHING: LEARNING THROUGH NATURE AND TECHNOLOGY Brady Self, Associate Extension Professor, Department of Forestry, Mississippi State University Jason Gordon, Assistant Professor, Warnell School of Forestry & Natural Resources, University of Georgia Parents, natural resource professionals and enthusiasts, and youth coordinators often find themselves at a loss when trying to encour- age younger generations to take up outdoor pastimes. The allure of electronic technology, team sports, combined with time availability of parents sometimes limits overall involve- ment of today’s youth in more traditional outdoor activities. In this fast-paced world, learning about nature and what occurs in the forest seems to be losing ground when competing for adolescents’ interest and time. The good news is that there are still many op- portunities to involve youth in the outdoors. The game of geocaching provides one of these opportunities. Geocaching offers learning and fun while spending time in nature. Geocaching is an outdoor treasure hunting game that operates much like the scavenger hunting that many parents and grandparents remember from their youth. The game adds the use of GPS technology (either a dedi- cated receiver unit, or more commonly, a GPS-enabled smartphone) to guide players to locations where individual geocaches are hidden. Clues are then used to search for the geocache. Geocaches can be selected or created with a theme focused on learning about forests, wildlife, and other natural resources. These experiences are then shared online in the geocaching community. The overall objective of the activity is to guide participants to places of significance where they have the opportu- nity to learn something about that particular location or geocache topic. -

The Brain Compass: a Perspective on How Self-Motion Updates the Head Direction Cell Attractor
bioRxiv preprint doi: https://doi.org/10.1101/189464; this version posted September 17, 2017. The copyright holder for this preprint (which was not certified by peer review) is the author/funder, who has granted bioRxiv a license to display the preprint in perpetuity. It is made available under aCC-BY-NC-ND 4.0 International license. The brain compass: a perspective on how self-motion updates the head direction cell attractor Jean Laurens, Dora E. Angelaki Dept. of Neuroscience, Baylor College of Medicine, Houston, TX, 77030, USA This study was supported by National Institutes of Health grants R21 NS098146 and R01- DC004260. Address for correspondence: Angelaki, Dora Department of Neuroscience Baylor College of Medicine One Baylor Plaza Houston, TX 77030 Office: (713) 798-1469 E-mail: [email protected] ABSTRACT Head Direction cells form an internal compass that signals head azimuth orientation even in the absence of visual landmarks. It is well accepted that head direction properties are generated through a ring attractor that is updated using rotation self-motion cues. The properties and origin of this self-motion velocity drive remain, however, unknown. We propose a unified, quantitative framework whereby the attractor velocity input represents a multisensory self-motion estimate computed through an internal model that uses sensory prediction error based on vestibular, visual, and somatosensory cues to improve on-line motor drive. We show how context- dependent strength of recurrent connections within the attractor itself, rather than the self- motion input, explain differences in head direction cell firing between free foraging and restrained movements. We also summarize recent findings on how head tilt relative to gravity influences the azimuth coding of head direction cells, and explain why and how these effects reflect an updating self-motion velocity drive that is not purely egocentric. -

The Three Meanings of Meaning in Life: Distinguishing Coherence, Purpose, and Significance
The Journal of Positive Psychology Dedicated to furthering research and promoting good practice ISSN: 1743-9760 (Print) 1743-9779 (Online) Journal homepage: http://www.tandfonline.com/loi/rpos20 The three meanings of meaning in life: Distinguishing coherence, purpose, and significance Frank Martela & Michael F. Steger To cite this article: Frank Martela & Michael F. Steger (2016) The three meanings of meaning in life: Distinguishing coherence, purpose, and significance, The Journal of Positive Psychology, 11:5, 531-545, DOI: 10.1080/17439760.2015.1137623 To link to this article: http://dx.doi.org/10.1080/17439760.2015.1137623 Published online: 27 Jan 2016. Submit your article to this journal Article views: 425 View related articles View Crossmark data Full Terms & Conditions of access and use can be found at http://www.tandfonline.com/action/journalInformation?journalCode=rpos20 Download by: [Colorado State University] Date: 06 July 2016, At: 11:55 The Journal of Positive Psychology, 2016 Vol. 11, No. 5, 531–545, http://dx.doi.org/10.1080/17439760.2015.1137623 The three meanings of meaning in life: Distinguishing coherence, purpose, and significance Frank Martelaa* and Michael F. Stegerb,c aFaculty of Theology, University of Helsinki, P.O. Box 4, Helsinki 00014, Finland; bDepartment of Psychology, Colorado State University, 1876 Campus Delivery, Fort Collins, CO 80523-1876, USA; cSchool of Behavioural Sciences, North-West University, Vanderbijlpark, South Africa (Received 25 June 2015; accepted 3 December 2015) Despite growing interest in meaning in life, many have voiced their concern over the conceptual refinement of the con- struct itself. Researchers seem to have two main ways to understand what meaning in life means: coherence and pur- pose, with a third way, significance, gaining increasing attention. -

Direction Giving and Following 1 Running Head
Direction giving and following 1 Running head: DIRECTION GIVING AND FOLLOWING Direction Giving and Following in the Service of Wayfinding in a Complex Indoor Environment Alycia M. Hund and Amanda J. Padgitt Illinois State University Direction giving and following 2 Abstract We examined how sense of direction, descriptive feature content, and gender relate to direction giving and following during wayfinding in a complex indoor environment. In Experiment 1, participants provided directions to destinations. Participants with a good sense of direction provided more distances, marginally more correct descriptions, and marginally fewer straight references than those with a poor sense of direction. In Experiment 2, participants rated the effectiveness of these directions. Directions that were rated highly contained more descriptive features than did directions that were rated less highly. In open-ended responses, positive mentions of landmarks and negative mentions of cardinal descriptors were frequent. In Experiment 3, participants navigated faster when following the worst-rated directions than when following the best-rated directions. Keywords: wayfinding, sense of direction, direction giving, direction following Direction giving and following 3 Direction Giving and Following in the Service of Wayfinding in a Complex Indoor Environment Finding our way through the environment is essential to human functioning. Often, people give and follow directions to facilitate wayfinding. For example, a college freshman may ask another student or a university staff member how to get to a classroom or office in a campus building. It is no surprise that spatial skills and strategies differ across individuals (e.g., Hegarty, Montello, Richardson, Ishikawa, & Lovelace, 2006; Kato & Takeuchi, 2003; Lawton, 1996; Prestopnik & Roskos-Ewoldsen, 2000). -

Autonomous Geocaching: Navigation and Goal Finding in Outdoor Domains
Autonomous Geocaching: Navigation and Goal Finding in Outdoor Domains James Neufeld Jason Roberts Stephen Walsh University of Alberta University of Alberta University of Alberta 114 St - 89 Ave 114 St - 89 Ave 114 St - 89 Ave Edmonton, Alberta Edmonton, Alberta Edmonton, Alberta [email protected] [email protected] [email protected] Michael Sokolsky Adam Milstein Michael Bowling University of Alberta University of Waterloo University of Alberta 114 St - 89 Ave 200 University Avenue West 114 St - 89 Ave Edmonton, Alberta Waterloo, Ontario Edmonton, Alberta [email protected] [email protected] [email protected] ABSTRACT ticipants use a handheld GPS to aid in ¯nding an object This paper describes an autonomous robot system designed hidden in an unknown environment given only the object's to solve the challenging task of geocaching. Geocaching GPS coordinates. Typically the objects are placed in unde- involves locating a goal object in an outdoor environment veloped areas with no obvious roads or paths. Natural ob- given only its rough GPS position. No additional informa- stacles along with the lack of any map of the terrain make tion about the environment such as road maps, waypoints, it a challenging navigation problem even for humans. In ad- or obstacle descriptions is provided, nor is there often a sim- dition, due to the error in GPS position estimates, a search ple straight line path to the object. This is in contrast to is usually required to ¯nally locate the object even after the much of the research in robot navigation which often focuses GPS coordinate has been reached. -
Military Map Reading V2.0
MILITARY MAP READING This booklet is to help qualified Defence Map Reading instructors in unit map reading training and testing. The primary source is the Manual of Map Reading and Land Navigation, Army Code 71874.Issue 1.0: Apr 2009. The booklet can be used by all ranks of HM Forces (RN, RM, Army and RAF) for study and revision. It is suggested that a map of the local area be obtained for practical work and for the study of Conventional signs, which are intentionally NOT covered in this booklet. Comments and queries should be addressed to: Senior Instructor, Geospatial Information Management Wing Royal School of Military Survey, Defence Intelligence Security Centre, Denison Barracks (SU 498 729) Hermitage, THATCHAM, Berkshire, RG18 9TP © Crown copyright. All rights reserved ICG 100015347 2007 Version 2.0 Dated December 2010. 1 MILITARY MAP READING INDEX CHAPTER 1: MAP READING FUNDAMENTALS Maps and the grid system 3 Grid references 3 MGRS 5 Romers 6 GPS 7 Scale 8 Estimating and measuring distances 9 Contours 11 The shape of the ground 12 Bearings 15 Compass distances from ferrous metal 17 CHAPTER 2: NAVIGATION EQUIPMENT The compass LW 18 The prismatic compass 20 The RA protractor 22 CHAPTER 3: TECHNIQUES AND SKILLS Relating map and ground 24 Using a lightweight compass to set a map 26 Finding a location by LW Intersection 27 Plotting back bearings-LW/RA protractor 28 Finding your location by LW resection 29 Finding direction by sun and stars 30 CHAPTER 4: ROUTE SELECTION Factors for route selection 34 Other planning factors 35 Route cards -

A Cognitive Model of Strategies for Cardinal Direction Judgments
SPATIAL COGNITION AND COMPUTATION, 7(2), 179–212 Copyright © 2007, Lawrence Erlbaum Associates, Inc. A Cognitive Model of Strategies for Cardinal Direction Judgments Leo Gugerty and William Rodes Psychology Department, Clemson University, Clemson, SC ABSTRACT Previous research has identified a variety of strategies used by novice and experienced navigators in making cardinal direction judgments (Gugerty, Brooks, & Treadaway, 2004). We developed an ACT-R cognitive model of some of these strategies that instantiated a number of concepts from research in spatial cognition, including a visual-short-term-memory buffer overlaid on a perceptual buffer, an egocentric ref- erence frame in visual-short-term-memory, storage of categorical spatial information in visual-short-term-memory, and rotation of a mental compass in visual-short-term- memory. Response times predicted by the model fit well with the data of two groups, college students (N D 20) trained and practiced in the modeled strategies, and jet pilots (N D 4) with no strategy training. Thus, the cognitive model seems to pro- vide an accurate description of important strategies for cardinal direction judgments. Additionally, it demonstrates how theoretical constructs in spatial cognition can be applied to a complex, realistic navigation task. Keywords: cardinal directions, cognitive modeling, visual short term memory. INTRODUCTION This project focuses on understanding the cognitive processes and structures people use in making a particular type of navigational judgment—using a map to determine the cardinal direction between two objects in the environment. We first developed a cognitive model of some of the strategies people use in making this type of cardinal direction judgment. -

Land Navigation, Compass Skills & Orienteering = Pathfinding
LAND NAVIGATION, COMPASS SKILLS & ORIENTEERING = PATHFINDING TABLE OF CONTENTS 1. LAND NAVIGATION, COMPASS SKILLS & ORIENTEERING-------------------p2 1.1 FIRST AID 1.2 MAKE A PLAN 1.3 WHERE ARE YOU NOW & WHERE DO YOU WANT TO GO? 1.4 WHAT IS ORIENTEERING? What is LAND NAVIGATION? WHAT IS PATHFINDING? 1.5 LOOK AROUND YOU WHAT DO YOU SEE? 1.6 THE TOOLS IN THE TOOLBOX MAP & COMPASS PLUS A FEW NICE THINGS 2 HOW TO USE A COMPASS-------------------------------------------p4 2.1 2.2 PARTS OF A COMPASS 2.3 COMPASS DIRECTIONS 2.4 HOW TO USE A COMPASS 2.5 TAKING A BEARING & FOLLOWING IT 3 TOPOGRAPHIC MAP THE BASICS OF MAP READING---------------------p8 3.1 TERRAIN FEATURES- 3.2 CONTOUR LINES & ELEVATION 3.3 TOPO MAP SYMBOLS & COLORS 3.4 SCALE & DISTANCE MEASURING ON A MAP 3.5 HOW TO ORIENT A MAP 3.6 DECLINATION 3.7 SUMMARY OF COMPASS USES & TIPS FOR USING A COMPASS 4 DIFFERENT TYPES OF MAPS----------------------------------------p13 4.1 PLANIMETRIC 4.2 PICTORIAL 4.3 TOPOGRAPHIC(USGS, FOREST SERVICE & NATIONAL PARK) 4.4 ORIENTIEERING MAP 4.5 WHERE TO GET MAPS ON THE INTERNET 4.6 HOW TO MAKE YOUR OWN ORIENTEERING MAP 5 LAND NAVIGATION & ORIENTEERING--------------------------------p14 5.1 WHAT IS ORIENTEERING? 5.2 Orienteering as a sport 5.3 ORIENTEERING SYMBOLS 5.4 ORIENTERING VOCABULARY 6 ORIENTEERING-------------------------------------------------p17 6.1 CHOOSING YOUR COURSE COURSE LEVELS 6.2 DOING YOUR COURSE 6.3 CONTROL DESCRIPTION CARDS 6.4 CONTROL DESCRIPTIONS 6.5 GPS A TOOL OR A CRUTCH? 7 THINGS TO REMEMBER-------------------------------------------p22 -

DIRECTION QUALITY and WAYFINDING EFFICIENCY 1 How
Running Head: DIRECTION QUALITY AND WAYFINDING EFFICIENCY 1 How Good Are These Directions? Determining Direction Quality and Wayfinding Efficiency Amanda J. Padgitt and Alycia M. Hund Illinois State University DIRECTION QUALITY AND WAYFINDING EFFICIENCY 2 Abstract Our goal was to specify the effectiveness of wayfinding directions in a complex indoor environment. We measured direction quality using effectiveness ratings and behavioral indices. In Study 1, participants provided effectiveness ratings for seven combinations of wayfinding descriptions. In general, ratings were higher for route details than for survey details, and ratings increased as the number of features increased. Moreover, people with a good self-reported sense of direction gave higher ratings to survey descriptions (cardinal directions and distances) relative to those with a poor self-reported sense of direction. In Study 2, participants provided effectiveness ratings for route and survey directions before and after wayfinding using these directions. Route directions resulted in fewer wayfinding errors and higher effectiveness ratings than did survey directions. People with a poor self-reported sense of direction made more wayfinding errors and provided lower effectiveness ratings than did people with a good self- reported sense of direction. We also demonstrated important relations between wayfinding errors and ratings after wayfinding, as well as links with sense of direction, wayfinding strategies, and mental rotation. Keywords: wayfinding, survey perspective, route perspective, sense of direction, effectiveness ratings, mental rotation DIRECTION QUALITY AND WAYFINDING EFFICIENCY 3 How Good Are These Directions? Determining Direction Quality and Wayfinding Efficiency Imagine that you are finding your way through a complex building for the first time. Someone tells you how to get to the room you need, and the directions sound like they contain the right information to get you there.