Einstein's Physics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Expanding Space, Quasars and St. Augustine's Fireworks
Universe 2015, 1, 307-356; doi:10.3390/universe1030307 OPEN ACCESS universe ISSN 2218-1997 www.mdpi.com/journal/universe Article Expanding Space, Quasars and St. Augustine’s Fireworks Olga I. Chashchina 1;2 and Zurab K. Silagadze 2;3;* 1 École Polytechnique, 91128 Palaiseau, France; E-Mail: [email protected] 2 Department of physics, Novosibirsk State University, Novosibirsk 630 090, Russia 3 Budker Institute of Nuclear Physics SB RAS and Novosibirsk State University, Novosibirsk 630 090, Russia * Author to whom correspondence should be addressed; E-Mail: [email protected]. Academic Editors: Lorenzo Iorio and Elias C. Vagenas Received: 5 May 2015 / Accepted: 14 September 2015 / Published: 1 October 2015 Abstract: An attempt is made to explain time non-dilation allegedly observed in quasar light curves. The explanation is based on the assumption that quasar black holes are, in some sense, foreign for our Friedmann-Robertson-Walker universe and do not participate in the Hubble flow. Although at first sight such a weird explanation requires unreasonably fine-tuned Big Bang initial conditions, we find a natural justification for it using the Milne cosmological model as an inspiration. Keywords: quasar light curves; expanding space; Milne cosmological model; Hubble flow; St. Augustine’s objects PACS classifications: 98.80.-k, 98.54.-h You’d think capricious Hebe, feeding the eagle of Zeus, had raised a thunder-foaming goblet, unable to restrain her mirth, and tipped it on the earth. F.I.Tyutchev. A Spring Storm, 1828. Translated by F.Jude [1]. 1. Introduction “Quasar light curves do not show the effects of time dilation”—this result of the paper [2] seems incredible. -

Cosmic Age Problem Revisited in the Holographic Dark Energy Model ∗ Jinglei Cui, Xin Zhang
中国科技论文在线 http://www.paper.edu.cn Physics Letters B 690 (2010) 233–238 Contents lists available at ScienceDirect Physics Letters B www.elsevier.com/locate/physletb Cosmic age problem revisited in the holographic dark energy model ∗ Jinglei Cui, Xin Zhang Department of Physics, College of Sciences, Northeastern University, Shenyang 110004, China article info abstract Article history: Because of an old quasar APM 08279 + 5255 at z = 3.91, some dark energy models face the challenge of Received 18 April 2010 the cosmic age problem. It has been shown by Wei and Zhang [H. Wei, S.N. Zhang, Phys. Rev. D 76 (2007) Received in revised form 18 May 2010 063003, arXiv:0707.2129 [astro-ph]] that the holographic dark energy model is also troubled with such a Accepted 20 May 2010 cosmic age problem. In order to accommodate this old quasar and solve the age problem, we propose in Available online 24 May 2010 this Letter to consider the interacting holographic dark energy in a non-flat universe. We show that the Editor: T. Yanagida cosmic age problem can be eliminated when the interaction and spatial curvature are both involved in Keywords: the holographic dark energy model. Holographic dark energy © 2010 Elsevier B.V. All rights reserved. Cosmic age problem 1. Introduction of quantum gravity could be taken into account. It is commonly believed that the holographic principle [16] is just a fundamental The fact that our universe is undergoing accelerated expansion principle of quantum gravity. Based on the effective quantum field has been confirmed by lots of astronomical observations such as theory, Cohen et al. -
Einstein Solid 1 / 36 the Results 2
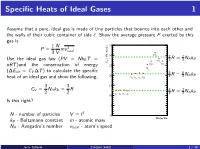
Specific Heats of Ideal Gases 1 Assume that a pure, ideal gas is made of tiny particles that bounce into each other and the walls of their cubic container of side `. Show the average pressure P exerted by this gas is 1 N 35 P = mv 2 3 V total SO 30 2 7 7 (J/K-mole) R = NAkB Use the ideal gas law (PV = NkB T = V 2 2 CO2 C H O CH nRT )and the conservation of energy 25 2 4 Cl2 (∆Eint = CV ∆T ) to calculate the specific 5 5 20 2 R = 2 NAkB heat of an ideal gas and show the following. H2 N2 O2 CO 3 3 15 CV = NAkB = R 3 3 R = NAkB 2 2 He Ar Ne Kr 2 2 10 Is this right? 5 3 N - number of particles V = ` 0 Molecule kB - Boltzmann constant m - atomic mass NA - Avogadro's number vtotal - atom's speed Jerry Gilfoyle Einstein Solid 1 / 36 The Results 2 1 N 2 2 N 7 P = mv = hEkini 2 NAkB 3 V total 3 V 35 30 SO2 3 (J/K-mole) V 5 CO2 C N k hEkini = NkB T H O CH 2 A B 2 25 2 4 Cl2 20 H N O CO 3 3 2 2 2 3 CV = NAkB = R 2 NAkB 2 2 15 He Ar Ne Kr 10 5 0 Molecule Jerry Gilfoyle Einstein Solid 2 / 36 Quantum mechanically 2 E qm = `(` + 1) ~ rot 2I where l is the angular momen- tum quantum number. -

Otto Sackur's Pioneering Exploits in the Quantum Theory Of
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Catalogo dei prodotti della ricerca Chapter 3 Putting the Quantum to Work: Otto Sackur’s Pioneering Exploits in the Quantum Theory of Gases Massimiliano Badino and Bretislav Friedrich After its appearance in the context of radiation theory, the quantum hypothesis rapidly diffused into other fields. By 1910, the crisis of classical traditions of physics and chemistry—while taking the quantum into account—became increas- ingly evident. The First Solvay Conference in 1911 pushed quantum theory to the fore, and many leading physicists responded by embracing the quantum hypoth- esis as a way to solve outstanding problems in the theory of matter. Until about 1910, quantum physics had drawn much of its inspiration from two sources. The first was the complex formal machinery connected with Max Planck’s theory of radiation and, above all, its close relationship with probabilis- tic arguments and statistical mechanics. The fledgling 1900–1901 version of this theory hinged on the application of Ludwig Boltzmann’s 1877 combinatorial pro- cedure to determine the state of maximum probability for a set of oscillators. In his 1906 book on heat radiation, Planck made the connection with gas theory even tighter. To illustrate the use of the procedure Boltzmann originally developed for an ideal gas, Planck showed how to extend the analysis of the phase space, com- monplace among practitioners of statistical mechanics, to electromagnetic oscil- lators (Planck 1906, 140–148). In doing so, Planck identified a crucial difference between the phase space of the gas molecules and that of oscillators used in quan- tum theory. -

Intermediate Statistics in Thermoelectric Properties of Solids
Intermediate statistics in thermoelectric properties of solids André A. Marinho1, Francisco A. Brito1,2 1 Departamento de Física, Universidade Federal de Campina Grande, 58109-970 Campina Grande, Paraíba, Brazil and 2 Departamento de Física, Universidade Federal da Paraíba, Caixa Postal 5008, 58051-970 João Pessoa, Paraíba, Brazil (Dated: July 23, 2019) Abstract We study the thermodynamics of a crystalline solid by applying intermediate statistics manifested by q-deformation. We based part of our study on both Einstein and Debye models, exploring primarily de- formed thermal and electrical conductivities as a function of the deformed Debye specific heat. The results revealed that the q-deformation acts in two different ways but not necessarily as independent mechanisms. It acts as a factor of disorder or impurity, modifying the characteristics of a crystalline structure, which are phenomena described by q-bosons, and also as a manifestation of intermediate statistics, the B-anyons (or B-type systems). For the latter case, we have identified the Schottky effect, normally associated with high-Tc superconductors in the presence of rare-earth-ion impurities, and also the increasing of the specific heat of the solids beyond the Dulong-Petit limit at high temperature, usually related to anharmonicity of interatomic interactions. Alternatively, since in the q-bosons the statistics are in principle maintained the effect of the deformation acts more slowly due to a small change in the crystal lattice. On the other hand, B-anyons that belong to modified statistics are more sensitive to the deformation. PACS numbers: 02.20-Uw, 05.30-d, 75.20-g arXiv:1907.09055v1 [cond-mat.stat-mech] 21 Jul 2019 1 I. -

MOLAR HEAT of SOLIDS the Dulong–Petit Law, a Thermodynamic
MOLAR HEAT OF SOLIDS The Dulong–Petit law, a thermodynamic law proposed in 1819 by French physicists Dulong and Petit, states the classical expression for the molar specific heat of certain crystals. The two scientists conducted experiments on three dimensional solid crystals to determine the heat capacities of a variety of these solids. They discovered that all investigated solids had a heat capacity of approximately 25 J mol-1 K-1 room temperature. The result from their experiment was explained as follows. According to the Equipartition Theorem, each degree of freedom has an average energy of 1 = 2 where is the Boltzmann constant and is the absolute temperature. We can model the atoms of a solid as attached to neighboring atoms by springs. These springs extend into three-dimensional space. Each direction has 2 degrees of freedom: one kinetic and one potential. Thus every atom inside the solid was considered as a 3 dimensional oscillator with six degrees of freedom ( = 6) The more energy that is added to the solid the more these springs vibrate. Figure 1: Model of interaction of atoms of a solid Now the energy of each atom is = = 3 . The energy of N atoms is 6 = 3 2 = 3 where n is the number of moles. To change the temperature by ΔT via heating, one must transfer Q=3nRΔT to the crystal, thus the molar heat is JJ CR=3 ≈⋅ 3 8.31 ≈ 24.93 molK molK Similarly, the molar heat capacity of an atomic or molecular ideal gas is proportional to its number of degrees of freedom, : = 2 This explanation for Petit and Dulong's experiment was not sufficient when it was discovered that heat capacity decreased and going to zero as a function of T3 (or, for metals, T) as temperature approached absolute zero. -

First Principles Study of the Vibrational and Thermal Properties of Sn-Based Type II Clathrates, Csxsn136 (0 ≤ X ≤ 24) and Rb24ga24sn112
Article First Principles Study of the Vibrational and Thermal Properties of Sn-Based Type II Clathrates, CsxSn136 (0 ≤ x ≤ 24) and Rb24Ga24Sn112 Dong Xue * and Charles W. Myles Department of Physics and Astronomy, Texas Tech University, Lubbock, TX 79409-1051, USA; [email protected] * Correspondence: [email protected]; Tel.: +1-806-834-4563 Received: 12 May 2019; Accepted: 11 June 2019; Published: 14 June 2019 Abstract: After performing first-principles calculations of structural and vibrational properties of the semiconducting clathrates Rb24Ga24Sn112 along with binary CsxSn136 (0 ≤ x ≤ 24), we obtained equilibrium geometries and harmonic phonon modes. For the filled clathrate Rb24Ga24Sn112, the phonon dispersion relation predicts an upshift of the low-lying rattling modes (~25 cm−1) for the Rb (“rattler”) compared to Cs vibration in CsxSn136. It is also found that the large isotropic atomic displacement parameter (Uiso) exists when Rb occupies the “over-sized” cage (28 atom cage) rather than the 20 atom counterpart. These guest modes are expected to contribute significantly to minimizing the lattice’s thermal conductivity (κL). Our calculation of the vibrational contribution to the specific heat and our evaluation on κL are quantitatively presented and discussed. Specifically, the heat capacity diagram regarding CV/T3 vs. T exhibits the Einstein-peak-like hump that is mainly attributable to the guest oscillator in a 28 atom cage, with a characteristic temperature 36.82 K for Rb24Ga24Sn112. Our calculated rattling modes are around 25 cm−1 for the Rb trapped in a 28 atom cage, and 65.4 cm−1 for the Rb encapsulated in a 20 atom cage. -

Reconciling the Cosmic Age Problem in the Rh = Ct Universe
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Springer - Publisher Connector Eur. Phys. J. C (2014) 74:3090 DOI 10.1140/epjc/s10052-014-3090-1 Regular Article - Theoretical Physics Reconciling the cosmic age problem in the Rh = ct universe H. Yu1,F.Y.Wang1,2,a 1 School of Astronomy and Space Science, Nanjing University, Nanjing 210093, China 2 Key Laboratory of Modern Astronomy and Astrophysics, Nanjing University, Ministry of Education, Nanjing 210093, China Received: 19 April 2014 / Accepted: 19 September 2014 / Published online: 2 October 2014 © The Author(s) 2014. This article is published with open access at Springerlink.com Abstract Many dark energy models fail to pass the cosmic t0 = 13.82 Gyr in the CDM model [6], but it still suf- age test. In this paper, we investigate the cosmic age problem fers from the cosmic age problem [11,12]. The cosmic age associated with nine extremely old Global Clusters (GCs) problem is that some objects are older than the age of the and the old quasar APM 08279+5255 in the Rh = ct uni- universe at its redshift z. In previous literature, many cos- verse. The age data of these oldest GCs in M31 are acquired mological models have been tested by the old quasar APM from the Beijing–Arizona–Taiwan–Connecticut system with 08279+5255 with age 2.1 ± 0.3 Gyr at z = 3.91 [13,14], up-to-date theoretical synthesis models. They have not been such as the CDM [13,15], the (t) model [16], the inter- used to test the cosmic age problem in the Rh = ct uni- acting dark energy models [12], the generalized Chaplygin verse in previous literature. -

Astro-Ph/9812074 3 Dec 1998 1 Ter Calibrations of Cepheid Luminositites, Alues
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by CERN Document Server The Cepheid Distance Scale after Hipparcos Frdric Pont Observatoire de Genve, Switzerland Abstract. More than twohundred classical cepheids were measured by the Hip- parcos astrometric satellite, making p ossible a geometrical calibration of the cepheid distance scale. However, the large average distance of even the nearest cepheids measured by Hipparcos implies trigonometric paral- laxes of at most a few mas. Determining unbiased distances and absolute magnitudes from such high relative error parallax data is not a trivial problem. In 1997, Feast & Catchp ole announced that Hipparcos cepheid paral- laxes indicated a Perio d-Luminosity scale 0.2 mag brighter than previous calibrations, with imp ortant consequences on the whole cosmic distance scale. In the wake of this initial study, several authors have reconsid- ered the question, and favour fainter calibrations of cepheid luminositites, compatible with pre-Hipparcos values. All authors used equivalent data sets, and the bulk of the di erence in the results arises from the statistical treatment of the parallax data. Wehave attempted to rep eat the analyses of all these studies and test them with Monte Carlo simulations and synthetic samples. We conclude that the initial Feast & Catchp ole study is sound, and that the subsequent studies are sub jected in several di erentways to biases involved in the treatment of high relative error parallax data. We consider the source of these biases in some detail. We also prop ose a reappraisal of the error budget in the nal Hipparcos cepheid result, leading to a PL relation { adapted from Feast & Catchp ole { of +0 M = 2:81(assumed) log P 1:43 0:16(stat) (syst) V 0:03 astro-ph/9812074 3 Dec 1998 We compare this calibration to recentvalues from cluster cepheids or the surface brightness metho d, and nd that the overall agreement is good within the uncertainties. -
Theoretical Deduction of the Hubble Law Beginning with a Mond Theory in Context of the ΛFRW-Cosmology
International Journal of Astronomy and Astrophysics, 2014, 4, 551-559 Published Online December 2014 in SciRes. http://www.scirp.org/journal/ijaa http://dx.doi.org/10.4236/ijaa.2014.44051 Theoretical Deduction of the Hubble Law Beginning with a MoND Theory in Context of the ΛFRW-Cosmology Nelson Falcon, Andrés Aguirre Laboratory of Physics of the Atmosphere and the Outer Space, University of Carabobo, Valencia, Venezuela Email: [email protected], [email protected] Received 11 September 2014; revised 8 October 2014; accepted 3 November 2014 Academic Editor: Luigi Maxmilian Caligiuri, University of Calabria, Italy Copyright © 2014 by authors and Scientific Research Publishing Inc. This work is licensed under the Creative Commons Attribution International License (CC BY). http://creativecommons.org/licenses/by/4.0/ Abstract We deduced the Hubble law and the age of the Universe, through the introduction of the Inverse Yukawa Field (IYF), as a non-local additive complement of the Newtonian gravitation (Modified Newtonian Dynamics). As a result, we connected the dynamics of astronomical objects at great scale with the Friedmann-Robertson-Walker ΛFRW) model. From the corresponding formalism, the Hubble law can be expressed as v=(4 π[ G] cr) , which was derived by evaluating the IYF force at distances much greater than 50 Mpc, giving a maximum value for the expansion rate of the (max) −−11 universe of H0 86.31 km⋅⋅ s Mpc , consistent with the observational data of 392 astronom- ical objects from NASA/IPAC Extragalactic Database (NED). This additional field (IYF) provides a simple interpretation of dark energy as the action of baryonic matter at large scales. -

Hostatmech.Pdf
A computational introduction to quantum statistics using harmonically trapped particles Martin Ligare∗ Department of Physics & Astronomy, Bucknell University, Lewisburg, PA 17837 (Dated: March 15, 2016) Abstract In a 1997 paper Moore and Schroeder argued that the development of student understanding of thermal physics could be enhanced by computational exercises that highlight the link between the statistical definition of entropy and the second law of thermodynamics [Am. J. Phys. 65, 26 (1997)]. I introduce examples of similar computational exercises for systems in which the quantum statistics of identical particles plays an important role. I treat isolated systems of small numbers of particles confined in a common harmonic potential, and use a computer to enumerate all possible occupation-number configurations and multiplicities. The examples illustrate the effect of quantum statistics on the sharing of energy between weakly interacting subsystems, as well as the distribution of energy within subsystems. The examples also highlight the onset of Bose-Einstein condensation in small systems. PACS numbers: 1 I. INTRODUCTION In a 1997 paper in this journal Moore and Schroeder argued that the development of student understanding of thermal physics could be enhanced by computational exercises that highlight the link between the statistical definition of entropy and the second law of thermodynamics.1 The first key to their approach was the use of a simple model, the Ein- stein solid, for which it is straightforward to develop an exact formula for the number of microstates of an isolated system. The second key was the use of a computer, rather than analytical approximations, to evaluate these formulas. -
Einstein Solids Interacting Solids Multiplicity of Solids PHYS 4311: Thermodynamics & Statistical Mechanics
Justin Einstein Solids Interacting Solids Multiplicity of Solids PHYS 4311: Thermodynamics & Statistical Mechanics Alejandro Garcia, Justin Gaumer, Chirag Gokani, Kristian Gonzalez, Nicholas Hamlin, Leonard Humphrey, Cullen Hutchison, Krishna Kalluri, Arjun Khurana Justin Introduction • Debye model(collective frequency motion) • Dulong–Petit law (behavior at high temperatures) predicted by Debye model •Polyatomic molecules 3R • dependence predicted by Debye model, too. • Einstein model not accurate at low temperatures Chirag Debye Model: Particle in a Box Chirag Quantum Harmonic Oscillator m<<1 S. eq. Chirag Discrete Evenly-Spaced Quanta of Energy Kristian What about in 3D? A single particle can "oscillate" each of the 3 cartesian directions: x, y, z. If we were just to look at a single atom subject to the harmonic oscillator potential in each cartesian direction, its total energy is the sum of energies corresponding to oscillations in the x direction, y direction, and z direction. Kristian Einstein Solid Model: Collection of Many Isotropic/Identical Harmonic Oscillators If our solid consists of N "oscillators" then there are N/3 atoms (each atom is subject to the harmonic oscillator potential in the 3 independent cartesian directions). Krishna What is the Multiplicity of an Einstein Solid with N oscillators? Our system has exactly N oscillators and q quanta of energy. This is the macrostate. There would be a certain number of microstates resulting from individual oscillators having different amounts of energy, but the whole solid having total q quanta of energy. Note that each microstate is equally probable! Krishna What is the Multiplicity of an Einstein Solid with N oscillators? Recall that energy comes in discrete quanta (units of hf) or "packets"! Each of the N oscillators will have an energy measure in integer units of hf! Question: Let an Einstein Solid of N oscillators have a fixed value of exactly q quanta of energy.