The T D N G and Modbatbn
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

La^Terrft Guides J Homesteaders at Night in Village Hi-Y Conference
~ MlsTMabel McCarne. HIGIITSTOWN, MI'RCER COUNTY, NKW JI'.KSliV, THUKSUAY, AUGUST 27, N U M B E R 1 4 VOLUME LXXXVIII Hi-Y Conference Will Receive Bids Associated Gas La^terrft Guides J S u n d a y m a i l TH.E NEW POST OFFICE -•Krarl- CboWbFPlah for Homesteaders At Limited Sunday mail service for In September At For Robbinsville Hightstown is under consideration When will construction work on Jersey Central Night in Village by the post office department, ac CampOckanickon State Highway Job the proposed new post office build cording to Postmaster Clarence S. Recreation Plans in Charge of Burling- New Construction Will Provide for ing begin? Bills were received at Proposes Reorganization of Utility Twenty-Two Families in Homes On Grover. Concern and Thereby Preventings The postmas.ter received a request ton County Group — “Y” Activities Widened Pavement With Safety Washington, D. C.. on June 30 las.t. Project — More Due This Week— Auction Scheduled for September from Washington for information as This Fall. island—Road Now Known As "Death No contract has been awariled as Planning for School. j ' . Trap.” Tenth. to the need of such service in yet as far as known here. Night life in Jersey ]Inmesieads is Hightstown. The service that would ■ ‘ Scwral Y. M, C. .A. iuuo . asking wlini their r-:roup i>r club will "Tn si\r \\\r-. and rediu'e nniinnlen- Till' Xs-Meialei! (bis and l-’dretrlc .smnething like Uliat of pioneer (lays. be rendered would probably include Condemnation proceedings were rcsunu’ fall nieeliinas. The answer ni ance U'l-’t'', Siale ilmlu\ay Coiinni''- vS\sluii Is awaitin.', court action in its In this age of eleetricily the home-, the receipt and dispatch of mail, J ligiilslown is: when the iniblie ,-eh'iol'' '^illn(■^ K, 1'mikiM Sterner- said, "the instituted in the Federal District m \M-'-t mo\e t" gain coiitr"! i*f tlve steaders are liiuling that kerosene hurn- sorting and boxing of incoming mail reopen. -

Commercial Broadcast Stations Biennial Ownership Report (FCC Form 323)
Approved by OMB (Office of Management and Budget) 3060-0010 September 2019 (REFERENCE COPY - Not for submission) Commercial Broadcast Stations Biennial Ownership Report (FCC Form 323) File Number: 0000102942 Submit Date: 2020-01-30 FRN: 0019721638 Purpose: Commercial Broadcast Stations Biennial Ownership Report Status: Received Status Date: 02/07/2020 Filing Status: Active Section I - General Information 1. Respondent FRN Entity Name 0019721638 Radio License Holding CBC, LLC Street City (and Country if State ("NA" if non- Zip Address non U.S. address) U.S. address) Code Phone Email 3280 Atlanta GA 30305 +1 (404) FCCLicenseManagement@cumulus. Peachtree 949-0700 com Road NW Suite 2200 2. Contact Name Organization Representative Mark Lipp, Esq. Fletcher Heald & Hildreth PLC Street Address City (and Country if non U.S. address) State Zip Code Phone Email 1300 N. 17th Arlington VA 22209 +1 (703) 812-0445 [email protected] Street Suite 1100 3. Application Question Response Filing Fee Is this application being submitted without a filing fee? No Fees Application Type Form Number Fee Code Quantity Fee Amount Subtotal Biennial Form 323 MAR 174 85 $12,180.00 Total $12,180.00 4. Nature of (a) Provide the following information about the Respondent: Respondent Relationship to stations/permits Licensee Nature of Respondent Limited liability company (b) Provide the following information about this report: Purpose Biennial "As of" date 10/01/2019 When filing a biennial ownership report or validating and resubmitting a prior biennial ownership report, this date must be Oct. 1 of the year in which this report is filed. 5. Licensee(s) and Station(s) Respondent is filing this report to cover the following Licensee(s) and station(s): Licensee/Permittee Name FRN Radio License Holding CBC, LLC 0019721638 Fac. -
Theory and Practice in the Teaching of Composition: Processing
DOCUMENT RESUME ED 227 515 CS 207 425 AUTHOR Myers, Miles, Ed.; Gray, James,Ed. TITLE Theory and Practice in theTeaching of Composition: Processing, Distancing, and.Modeling. INSTITUTION National Council of Teachers ofEnglish, Urbana, REPORT NO ISBN-0-8141-5399-2 PUB DATE 83 NOTE 254p. AVAILABLE FROM Nationa,1 Council of Teachers ofEnglish, 1111 Kenyon Rd., Urbana, IL 61801 (Stock No.53992, $11.50 non-member, $10.00 member). PUB TYpE Guides - Classroom Use - Guides,(ForTeachers) (052) -- Books (010) EDRS PRICE MF01/PC11 Plus Postage. DESCRIPTORS Cognitive Processes; Curriculum;Elementary Secondary Education; Higher Education;grewriting; Student Writing Models; *reaching Methods;*Theories; *Writing (Composition); *WritingInstruction; *Writing Processes; Writing Research;*Writing Skills IDENTIFIERS *Theory Practice Relationship;Writing Programs ABSTRACT Intended to show teachers howtheir approiches to the teaching of writing reflect aparticular area of research and toshow researchers how the intuitions ofteachers reflect researchfindings, the rticles in this book areclassified according to three approaches to writing: processing,distancing, and modeling. After an introductory essay that defines andexplains the three approaches, the second part of the bookcontains eight articles that stress processing. These articles cover thepsychology of thinking, mapping and composing, children's art,drawing as prewriting, prewriting as discovery, turning speech intowriting, and the process approachand dealing with the elementary schoolwriting curriculum. Part three, distancing, contains two articlesdefining "talk-write" as a behavioral pedagogy forcomposition and explaining itsapplication in ti-e classroom; and fivearticles on function catejories, the composition course as thepursuit of ideas, a new curriiculumin English, student writing response groupsin the classroom, and the All-City High Project of theOakland, California, schooldistrict. -

530 CIAO BRAMPTON on ETHNIC AM 530 N43 35 20 W079 52 54 09-Feb
frequency callsign city format identification slogan latitude longitude last change in listing kHz d m s d m s (yy-mmm) 530 CIAO BRAMPTON ON ETHNIC AM 530 N43 35 20 W079 52 54 09-Feb 540 CBKO COAL HARBOUR BC VARIETY CBC RADIO ONE N50 36 4 W127 34 23 09-May 540 CBXQ # UCLUELET BC VARIETY CBC RADIO ONE N48 56 44 W125 33 7 16-Oct 540 CBYW WELLS BC VARIETY CBC RADIO ONE N53 6 25 W121 32 46 09-May 540 CBT GRAND FALLS NL VARIETY CBC RADIO ONE N48 57 3 W055 37 34 00-Jul 540 CBMM # SENNETERRE QC VARIETY CBC RADIO ONE N48 22 42 W077 13 28 18-Feb 540 CBK REGINA SK VARIETY CBC RADIO ONE N51 40 48 W105 26 49 00-Jul 540 WASG DAPHNE AL BLK GSPL/RELIGION N30 44 44 W088 5 40 17-Sep 540 KRXA CARMEL VALLEY CA SPANISH RELIGION EL SEMBRADOR RADIO N36 39 36 W121 32 29 14-Aug 540 KVIP REDDING CA RELIGION SRN VERY INSPIRING N40 37 25 W122 16 49 09-Dec 540 WFLF PINE HILLS FL TALK FOX NEWSRADIO 93.1 N28 22 52 W081 47 31 18-Oct 540 WDAK COLUMBUS GA NEWS/TALK FOX NEWSRADIO 540 N32 25 58 W084 57 2 13-Dec 540 KWMT FORT DODGE IA C&W FOX TRUE COUNTRY N42 29 45 W094 12 27 13-Dec 540 KMLB MONROE LA NEWS/TALK/SPORTS ABC NEWSTALK 105.7&540 N32 32 36 W092 10 45 19-Jan 540 WGOP POCOMOKE CITY MD EZL/OLDIES N38 3 11 W075 34 11 18-Oct 540 WXYG SAUK RAPIDS MN CLASSIC ROCK THE GOAT N45 36 18 W094 8 21 17-May 540 KNMX LAS VEGAS NM SPANISH VARIETY NBC K NEW MEXICO N35 34 25 W105 10 17 13-Nov 540 WBWD ISLIP NY SOUTH ASIAN BOLLY 540 N40 45 4 W073 12 52 18-Dec 540 WRGC SYLVA NC VARIETY NBC THE RIVER N35 23 35 W083 11 38 18-Jun 540 WETC # WENDELL-ZEBULON NC RELIGION EWTN DEVINE MERCY R. -

Order and Consent Decree
Federal Communications Commission DA 16-3 Before the Federal Communications Commission Washington, DC 20554 In the Matter of ) ) File No.: EB-IHD-14-000151152 Radio License Holding CBC, LLC ) Acct. No.: 201632080003 ) FRN: 0019721638 Former Licensee of Station WOKQ(FM), ) Facility ID No.: 22887 Dover, New Hampshire1; and ) ) Cumulus Radio Corporation ) FRN: 0001595214 ) ORDER Adopted: January 7, 2016 Released: January 7, 2016 By the Chief, Enforcement Bureau: 1. The Enforcement Bureau (Bureau) of the Federal Communications Commission (Commission) has entered into a Consent Decree to resolve its investigation into whether Radio License Holding CBC, LLC (Radio License), and Radio License’s parent, Cumulus Radio Corporation (CRC), broadcast announcements on radio station WOKQ(FM), Dover, New Hampshire (Station), without adequate sponsorship disclosure in violation of the Commission’s sponsorship identification laws. 2. The Commission’s sponsorship identification laws protect consumers and promote fair competition by requiring that the sponsors of paid programming material be clearly identified. Those laws are based on the principle that listeners and viewers are entitled to know who seeks to persuade them. The disclosures required by those laws provide listeners and viewers with information concerning the source of material in order to prevent misleading or deceiving those listeners and viewers. Enforcement of the sponsorship identification laws also protects fair competition among advertisers. We seek to prevent sponsors from gaining unfair advantage by paying stations to present promotional messages without appropriate disclosures, while their competitors observe the rules and present their content as properly acknowledged commercial advertisements. 3. The Bureau investigated a complaint that the Station broadcast announcements supporting a hydro-electronic energy project in New Hampshire without disclosing the identity of the company that sponsored the announcements. -

Exhibit 2181
Exhibit 2181 Case 1:18-cv-04420-LLS Document 131 Filed 03/23/20 Page 1 of 4 Electronically Filed Docket: 19-CRB-0005-WR (2021-2025) Filing Date: 08/24/2020 10:54:36 AM EDT NAB Trial Ex. 2181.1 Exhibit 2181 Case 1:18-cv-04420-LLS Document 131 Filed 03/23/20 Page 2 of 4 NAB Trial Ex. 2181.2 Exhibit 2181 Case 1:18-cv-04420-LLS Document 131 Filed 03/23/20 Page 3 of 4 NAB Trial Ex. 2181.3 Exhibit 2181 Case 1:18-cv-04420-LLS Document 131 Filed 03/23/20 Page 4 of 4 NAB Trial Ex. 2181.4 Exhibit 2181 Case 1:18-cv-04420-LLS Document 132 Filed 03/23/20 Page 1 of 1 NAB Trial Ex. 2181.5 Exhibit 2181 Case 1:18-cv-04420-LLS Document 133 Filed 04/15/20 Page 1 of 4 ATARA MILLER Partner 55 Hudson Yards | New York, NY 10001-2163 T: 212.530.5421 [email protected] | milbank.com April 15, 2020 VIA ECF Honorable Louis L. Stanton Daniel Patrick Moynihan United States Courthouse 500 Pearl St. New York, NY 10007-1312 Re: Radio Music License Comm., Inc. v. Broad. Music, Inc., 18 Civ. 4420 (LLS) Dear Judge Stanton: We write on behalf of Respondent Broadcast Music, Inc. (“BMI”) to update the Court on the status of BMI’s efforts to implement its agreement with the Radio Music License Committee, Inc. (“RMLC”) and to request that the Court unseal the Exhibits attached to the Order (see Dkt. -

Federal Communications Commission DA 11-1546 Before the Federal
Federal Communications Commission DA 11-1546 Before the Federal Communications Commission Washington, D.C. 20554 In the Matter of ) ) Existing Shareholders of Cumulus ) BTC-20110330ALU, et al., Media, Inc. (Transferors) ) BTCH-20110331AIF, et al., and ) BTCH-20110331 AJF, et al., Existing Shareholders of Citadel ) BTCH-20110331AJN Broadcasting Corporation (Transferors) ) BTC-20110331AJO and ) BTCFT-20110331AKE, et al., New Shareholders of Cumulus Media, Inc. ) BTC-20110330ADE, et al., (Transferees) ) BTC-20110330ALJ, et al., ) BTCH-20110330ALM, et al., For Consent to Transfers of Control ) BTCH-20110330ALO, et al., ) BTCH-20110330AYC ) BTC-20110330AYD ) BTC-20110330AYF, et al., ) BTC-20110331AAA, et al., ) BTC-20110331AEV, ) BTC-20110331AEU ) BTC-20110331AEW ) BTCH-20110331AEX ) BTC-20110331AHZ, et al., ) BTCFT-20110510ADO, et al., ) Existing Shareholders of Cumulus ) BALH-20110331AID, et al., Media, Inc. ) BAL-20110331AJP, et al., (Assignors) ) BALH-20110331AJZ and ) BAL-20110331AKA Existing Shareholders of Citadel ) Broadcasting Corporation ) (Assignors) ) and ) Volt Radio, LLC, as Trustee ) (Assignee) ) ) For Consent to Assignment of Licenses ) MEMORANDUM OPINION AND ORDER Adopted: September 14, 2011 Released: September 14, 2011 By the Chief, Media Bureau: Federal Communications Commission DA 11-1546 I. INTRODUCTION 1. The Media Bureau (“Bureau”) has under consideration the captioned transfer and assignment applications (the “Applications”), as amended,1 in connection with a proposed transaction whereby a wholly-owned subsidiary of -

Licensing and Management System
Approved by OMB (Office of Management and Budget) 3060-0010 September 2019 (REFERENCE COPY - Not for submission) Amendment to a Commercial Broadcast Stations Biennial Ownership Report File Number: 0000101736 Submit Date: 2021-04-13 FRN: 0027643071 Purpose: Commercial Broadcast Stations Biennial Ownership Report Amendment Status: Received Status Date: 04/13/2021 Filing Status: Active Section I - General Information 1. Respondent FRN Entity Name 0027643071 SP Signal Manager, LLC Street City (and Country if non State ("NA" if non-U. Zip Address U.S. address) S. address) Code Phone Email Two Greenwich CT 06830 +1 (203) kmatthews@silverpointcapital. Greenwich 542-4274 com Plaza 2. Contact Name Organization Representative John S. Logan Cooley LLP Zip Street Address City (and Country if non U.S. address) State Code Phone Email 1299 Washington DC 20004 +1 (202) 776-2640 [email protected] Pennsylvania Avenue, NW Suite 700 Not Applicable 3. Application Filing Fee 4. Nature of (a) Provide the following information about the Respondent: Respondent Relationship to stations/permits Entity required to file a Form 323 because it holds an attributable interest in one or more Licensees Nature of Respondent Limited liability company (b) Provide the following information about this report: Purpose Biennial "As of" date 10/01/2019 When filing a biennial ownership report or validating and resubmitting a prior biennial ownership report, this date must be Oct. 1 of the year in which this report is filed. Reason for Amendment Addition of Stations Per FCC Request 5. Licensee(s) and Station(s) Respondent is filing this report to cover the following Licensee(s) and station(s): Licensee/Permittee Name FRN Radio License Holding SRC LLC 0023756331 Fac. -

Licensing and Management System
Approved by OMB (Office of Management and Budget) 3060-0010 September 2019 (REFERENCE COPY - Not for submission) Amendment to a Commercial Broadcast Stations Biennial Ownership Report File Number: 0000102895 Submit Date: 2021-04-08 FRN: 0002834810 Purpose: Commercial Broadcast Stations Biennial Ownership Report Amendment Status: Received Status Date: 04/08/2021 Filing Status: Active Section I - General Information 1. Respondent FRN Entity Name 0024905762 Cumulus Intermediate Holdings LLC Street City (and Country if State ("NA" if non- Zip Address non U.S. address) U.S. address) Code Phone Email 3280 Atlanta GA 30305 +1 (404) FCCLicenseManagement@cumulus. Peachtree 949-0700 com Road NW Suite 2200 2. Contact Name Organization Representative Mark Lipp Fletcher Heald & Hildreth PLC Street Address City (and Country if non U.S. address) State Zip Code Phone Email 1300 N. 17th Arlington VA 30305 +1 (703) 812-0445 [email protected] Street Suite 1100 Not Applicable 3. Application Filing Fee 4. Nature of (a) Provide the following information about the Respondent: Respondent Relationship to stations/permits Entity required to file a Form 323 because it holds an attributable interest in one or more Licensees Nature of Respondent Limited liability company (b) Provide the following information about this report: Purpose Biennial "As of" date 10/01/2019 When filing a biennial ownership report or validating and resubmitting a prior biennial ownership report, this date must be Oct. 1 of the year in which this report is filed. Reason for Amendment Correct name of parent entity and add to station list. 5. Licensee(s) and Station(s) Respondent is filing this report to cover the following Licensee(s) and station(s): Licensee/Permittee Name FRN Radio License Holding SRC LLC 0023756331 Fac. -
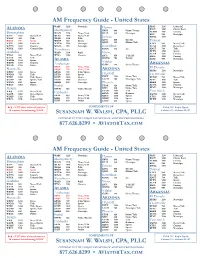
AM Radio Guide Version 1.4 For
AM Frequency Guide - United States LABAMA WABF 1220 Nostalgia Homer KISO 1230 Urban AC A KSLX 1440 Classic Rock Montgomery KBBI 890 News/Variety KCWW 1580 Country Birmingham WACV 1170 News/Talk KGTL 620 Nostalgia KOY 550 Nostalgia WAPI 1070 News/Talk WLWI 1440 News/Talk KMYL 1190 WERC 960 Talk WIQR 1410 Talk Juneau WJOX 690 Sports WMSP 740 Sports KINY 800 Hot AC Tucson WJLD 1400 Urban AC WTLM 1520 Nostalgia KJNO 630 Oldies/Talk KTKT 990 News/Talk WFHK 1430 Country WNZZ 950 Nostalgia Ketchikan KUAT 1550 News/Jazz WPYK 1010 Country Olds Tuscaloosa KTKN 930 AC KNST 790 Talk KFFN 1490 Sports Gadsden WAJO 1310 R&B Nome KCUB 1290 Country WNSI 810 News/Talk WVSA 1380 Country KICY 850 Talk/AC KHIL 1250 Country WAAX 570 Talk KNOM 780 Variety KSAZ 580 Nostalgia WHMA 1390 Sports ALASKA WZOB 1250 Country Valdez ARKANSAS WGAD 1350 Oldies Anchorage KCHU 770 News/Variety KENI 650 News/Talk El Dorado Huntsville KFQD 750 News/Talk ARIZONA KDMS 1290 Nostalgia WBHP 1230 News KBYR 700 Talk/Sports WVNN 770 Talk KTZN 550 Sports Flagstaff Fayetteville WTKI 1450 Talk/Sports KAXX 1020 Sports KYET 1180 News/Talk KURM 790 News/Talk WUMP 730 Sports/Talk KASH 1080 Classical KAZM 780 Nostalgia/Talk KFAY 1030 Talk WZNN 620 Sports KHAR 590 Nostalgia Phoenix KREB 1390 Sports WKAC 1080 Oldies Bethel KTAR 620 News/Talk KUOA 1290 Country KESE 1190 Nostalgia Mobile KYUK 640 News/Variety KFYI 910 News/Talk WKSJ 1270 News/Talk KXAM 1310 Talk Fort Smith WABB 1480 News/Sports Fairbanks KFNN 1510 Business KWHN 1320 News/Talk WHEP 1310 Talk KFAR 660 News/Talk KDUS 1060 Sports KTCS 1410 Country KIAK 970 News/Talk WBCA 1110 Country Olds KGME 1360 Sports KFPW 1230 Nostalgia KCBF 820 Oldies KMVP 860 Sports Red = FCC clear channel stations COMPLIMENTS OF AM & HF Radio Guide & stations broadcasting 50 KW SUSANNAH W. -
Freq Call State Location U D N C Distance Bearing
AM BAND RADIO STATIONS COMPILED FROM FCC CDBS DATABASE AS OF FEB 6, 2012 POWER FREQ CALL STATE LOCATION UDNCDISTANCE BEARING NOTES 540 WASG AL DAPHNE 2500 18 1107 103 540 KRXA CA CARMEL VALLEY 10000 500 848 278 540 KVIP CA REDDING 2500 14 923 295 540 WFLF FL PINE HILLS 50000 46000 1523 102 540 WDAK GA COLUMBUS 4000 37 1241 94 540 KWMT IA FORT DODGE 5000 170 790 51 540 KMLB LA MONROE 5000 1000 838 101 540 WGOP MD POCOMOKE CITY 500 243 1694 75 540 WXYG MN SAUK RAPIDS 250 250 922 39 540 WETC NC WENDELL-ZEBULON 4000 500 1554 81 540 KNMX NM LAS VEGAS 5000 19 67 109 540 WLIE NY ISLIP 2500 219 1812 69 540 WWCS PA CANONSBURG 5000 500 1446 70 540 WYNN SC FLORENCE 250 165 1497 86 540 WKFN TN CLARKSVILLE 4000 54 1056 81 540 KDFT TX FERRIS 1000 248 602 110 540 KYAH UT DELTA 1000 13 415 306 540 WGTH VA RICHLANDS 1000 97 1360 79 540 WAUK WI JACKSON 400 400 1090 56 550 KTZN AK ANCHORAGE 3099 5000 2565 326 550 KFYI AZ PHOENIX 5000 1000 366 243 550 KUZZ CA BAKERSFIELD 5000 5000 709 270 550 KLLV CO BREEN 1799 132 312 550 KRAI CO CRAIG 5000 500 327 348 550 WAYR FL ORANGE PARK 5000 64 1471 98 550 WDUN GA GAINESVILLE 10000 2500 1273 88 550 KMVI HI WAILUKU 5000 3181 265 550 KFRM KS SALINA 5000 109 531 60 550 KTRS MO ST. LOUIS 5000 5000 907 73 550 KBOW MT BUTTE 5000 1000 767 336 550 WIOZ NC PINEHURST 1000 259 1504 84 550 WAME NC STATESVILLE 500 52 1420 82 550 KFYR ND BISMARCK 5000 5000 812 19 550 WGR NY BUFFALO 5000 5000 1533 63 550 WKRC OH CINCINNATI 5000 1000 1214 73 550 KOAC OR CORVALLIS 5000 5000 1071 309 550 WPAB PR PONCE 5000 5000 2712 106 550 WBZS RI -

**Sr REGENT COVERS
50 East River Center Boulevard, Suite 180 Covington, Kentucky 41011 www.regentcomm.com ANNUAL REPORT 1999 Directors Officers Portfolio Terry S. Jacobs R. Glen Mayfield Terry S. Jacobs Chairman of the Board, Chief Principal of RiverCities Capital Chairman of the Board, Chief Executive Officer and Treasurer Fund Limited Partnership and Executive Officer and Treasurer President of Mayfield & William L. Stakelin William L. Stakelin Robinson, Inc., a management of Stations President, Chief Operating President, Chief Operating and financial consulting firm. Officer and Secretary Officer and Secretary Richard H. Patterson Joel M. Fairman Joel M. Fairman Vice President of Waller-Sutton St. Cloud, MN L Vice Chairman Vice Chairman L Watertown, NY Management Group, Inc. and a principal of Spire Capital Grand Rapids, MI L L Utica-Rome, NY Kenneth J. Hanau Fred L. Murr L Partners, L.P., a private equity Flint, MI L Albany, NY Principal of Weiss, Peck and Senior Vice President L Erie, PA Greer, L.L.C., a venture capital fund specializing in media and Anthony A. Vasconcellos L Mansfield, OH L investment firm, and a principal communications. Redding, CA Vice President and Chief of WPG Private Equity Partners, L Chico, CA William P. Sutter, Jr. Financial Officer # II, L.L.C. Covington, KY Vice President of Mesirow Matthew A. Yeoman L Victorville, CA William H. Ingram Financial Services, Inc., a finan- Vice President, Finance L Palmdale-Lancaster, CA Chairman of the Board of cial services firm, general partner Directors of Waller-Sutton of Mesirow Capital Partners VII, David J. Remund Management Group, Inc., which and Senior Managing Director Vice President of Engineering L El Paso, TX manages Waller-Sutton Media of Mesirow Private Equity Partners, L.P., an investment Investments, Inc.