Robots Underpinning Future NATO Operations (Robots Étayant Les Futures Opérations De L’OTAN)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Rebecca Farden Information Technology 101 Term Paper the US Military Uses Some of the Most Advanced Technologies Known to Man, O
Rebecca Farden Information Technology 101 Term Paper Use of Robotics in the US Military The US military uses some of the most advanced technologies known to man, one main segment being robotics. As this growing field of research is being developed, militaries around the world are beginning to use technologies that may change the way wars are fought. The trend we are currently seeing is an increase in unmanned weaponry, and decrease in actual human involvement in combat. Spending on research in this area is growing drastically and it is expected to continue. Thus far, robotics have been viewed as a positive development in their militaristic function, but as this field advances, growing concerns about their use and implications are arising. Currently, robotics in the military are used in a variety of ways, and new developments are constantly surfacing. For example, the military uses pilotless planes to do surveillance, and unmanned aerial attacks called “drone” strikes (Hodge). These attacks have been frequently used in Iraq in Pakistan in the past several years. Robotics have already proved to be very useful in other roles as well. Deputy commanding general of the Army Maneuver Support Center Rebecca Johnson said “robots are useful for chemical detection and destruction; mine clearing, military police applications and intelligence” (Farrell). Robots that are controlled by soldiers allow for human control without risking a human life. BomBots are robots that are have been used in the middle east to detonate IEDs (improvised explosive devices), keeping soldiers out of this very dangerous situation (Atwater). These uses of robots have been significant advances in the way warfare is carried out, but we are only scratching the surface of the possibilities of robotics in military operations. -

AI, Robots, and Swarms: Issues, Questions, and Recommended Studies
AI, Robots, and Swarms Issues, Questions, and Recommended Studies Andrew Ilachinski January 2017 Approved for Public Release; Distribution Unlimited. This document contains the best opinion of CNA at the time of issue. It does not necessarily represent the opinion of the sponsor. Distribution Approved for Public Release; Distribution Unlimited. Specific authority: N00014-11-D-0323. Copies of this document can be obtained through the Defense Technical Information Center at www.dtic.mil or contact CNA Document Control and Distribution Section at 703-824-2123. Photography Credits: http://www.darpa.mil/DDM_Gallery/Small_Gremlins_Web.jpg; http://4810-presscdn-0-38.pagely.netdna-cdn.com/wp-content/uploads/2015/01/ Robotics.jpg; http://i.kinja-img.com/gawker-edia/image/upload/18kxb5jw3e01ujpg.jpg Approved by: January 2017 Dr. David A. Broyles Special Activities and Innovation Operations Evaluation Group Copyright © 2017 CNA Abstract The military is on the cusp of a major technological revolution, in which warfare is conducted by unmanned and increasingly autonomous weapon systems. However, unlike the last “sea change,” during the Cold War, when advanced technologies were developed primarily by the Department of Defense (DoD), the key technology enablers today are being developed mostly in the commercial world. This study looks at the state-of-the-art of AI, machine-learning, and robot technologies, and their potential future military implications for autonomous (and semi-autonomous) weapon systems. While no one can predict how AI will evolve or predict its impact on the development of military autonomous systems, it is possible to anticipate many of the conceptual, technical, and operational challenges that DoD will face as it increasingly turns to AI-based technologies. -

Modular Open Robots Simulation Engine: MORSE
Modular Open Robots Simulation Engine: MORSE Gilberto Echeverria and Nicolas Lassabe and Arnaud Degroote and Severin´ Lemaignan Abstract— This paper presents MORSE, a new open–source robotics simulator. MORSE provides several features of interest to robotics projects: it relies on a component-based architecture to simulate sensors, actuators and robots; it is flexible, able to specify simulations at variable levels of abstraction according to the systems being tested; it is capable of representing a large variety of heterogeneous robots and full 3D environments (aerial, ground, maritime); and it is designed to allow simu- lations of multiple robots systems. MORSE uses a “Software- (a) A mobile robot in an indoor scene (b) A helicopter and two mobile in-the-Loop” philosophy, i.e. it gives the possibility to evaluate ground robots outdoors the algorithms embedded in the software architecture of the robot within which they are to be integrated. Still, MORSE Fig. 1: Screenshots of the MORSE simulator. is independent of any robot architecture or communication framework (middleware). MORSE is built on top of Blender, using its powerful features and extending its functionality through Python scripts. sensor or path planning for a particular kinematic system Simulations are executed on Blender’s Game Engine mode, [3], [4], [5]; such simulators are highly specialised (“Unitary which provides a realistic graphical display of the simulated Simulation”). On the other hand, some applications require environments and allows exploiting the reputed Bullet physics a more general simulator that can allow the evaluation of engine. This paper presents the conception principles of the simulator and some use–case illustrations. -
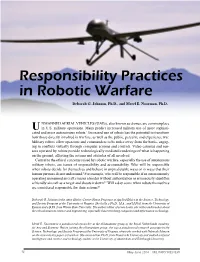
Responsibility Practices in Robotic Warfare Deborah G
Responsibility Practices in Robotic Warfare Deborah G. Johnson, Ph.D., and Merel E. Noorman, Ph.D. NMANNED AERIAL VEHICLES (UAVs), also known as drones, are commonplace in U.S. military operations. Many predict increased military use of more sophisti- Ucated and more autonomous robots.1 Increased use of robots has the potential to transform how those directly involved in warfare, as well as the public, perceive and experience war. Military robots allow operators and commanders to be miles away from the battle, engag- ing in conflicts virtually through computer screens and controls. Video cameras and sen- sors operated by robots provide technologically mediated renderings of what is happening on the ground, affecting the actions and attitudes of all involved. Central to the ethical concerns raised by robotic warfare, especially the use of autonomous military robots, are issues of responsibility and accountability. Who will be responsible when robots decide for themselves and behave in unpredictable ways or in ways that their human partners do not understand? For example, who will be responsible if an autonomously operating unmanned aircraft crosses a border without authorization or erroneously identifies a friendly aircraft as a target and shoots it down?2 Will a day come when robots themselves are considered responsible for their actions?3 Deborah G. Johnson is the Anne Shirley Carter Olsson Professor of Applied Ethics in the Science, Technology, and Society Program at the University of Virginia. She holds a Ph.D., M.A., and M.Phil. from the University of Kansas and a B.Ph. from Wayne State University. The author/editor of seven books, she writes and teaches about the ethical issues in science and engineering, especially those involving computers and information technology. -
Operational Requirements for Soldier-Robot Teaming
CAN UNCLASSIFIED Operational Requirements for Soldier-Robot Teaming Simon Banbury Kevin Heffner Hugh Liu Serge Pelletier Calian Ltd. Prepared by: Calian Ltd. 770 Palladium Drive Ottawa, Canada K2V 1C8 Contractor Document Number: DND-1144.1.1-01 PSPC Contract Number: W7719-185397/001/TOR Technical Authority: Ming Hou, DRDC – Toronto Research Centre Contractor's date of publication: August 2020 The body of this CAN UNCLASSIFIED document does not contain the required security banners according to DND security standards. However, it must be treated as CAN UNCLASSIFIED and protected appropriately based on the terms and conditions specified on the covering page. Defence Research and Development Canada Contract Report DRDC-RDDC-2020-C172 November 2020 CAN UNCLASSIFIED CAN UNCLASSIFIED IMPORTANT INFORMATIVE STATEMENTS This document was reviewed for Controlled Goods by Defence Research and Development Canada using the Schedule to the Defence Production Act. Disclaimer: This document is not published by the Editorial Office of Defence Research and Development Canada, an agency of the Department of National Defence of Canada but is to be catalogued in the Canadian Defence Information System (CANDIS), the national repository for Defence S&T documents. Her Majesty the Queen in Right of Canada (Department of National Defence) makes no representations or warranties, expressed or implied, of any kind whatsoever, and assumes no liability for the accuracy, reliability, completeness, currency or usefulness of any information, product, process or material included in this document. Nothing in this document should be interpreted as an endorsement for the specific use of any tool, technique or process examined in it. Any reliance on, or use of, any information, product, process or material included in this document is at the sole risk of the person so using it or relying on it. -
Post-Graduation Report Class of 2018
Post-Graduation Report Class of 2018 wpi.edu/+cdc Executive Summary Post-Graduation Report for the Class of 2018 The Career Development Center (CDC) is pleased to present the WPI Post-Graduation Report for the Class of 2018 including all degree levels, following standards set by the National Association of Colleges and Employers (NACE). For details on data collection and reporting, see the Methodology section of this report. Highlights for the class of 2018 include the following: Knowledge Rate For bachelor’s degree graduates the knowledge rate was 92%, much higher than the typical national average of 65% (NACE First Destination Report 2017). The knowledge rate is the proportion of graduates for whom career data was collected from all sources (i.e. self-report, phone campaign, faculty and staff, social media). Success Rate The success rate for bachelor’s degree graduates inched up to 93.0% (94.6% for graduates of all degree levels -- bachelor’s, master’s, PhD -- combined). The success rate is the proportion of graduates who are employed, in graduate school, active duty military or volunteer service for whom data was collected excluding those “not seeking”. Average Starting Salary The average starting salary for bachelor’s degree graduates rose more than $2,000 from the previous year to $69,219, typically only about one-third of employed graduates report salary information, these data are confidential and used only in aggregate to produce this report. Employer Engagement Over 450 different companies recruited on-campus (career fairs, information sessions, on-campus interviews, networking events, and career expos) last year and thousands more virtually. -

Testimony of Tim Cortes, Chief Technology Officer on Behalf of Plug Power Inc
Testimony of Tim Cortes, Chief Technology Officer on behalf of Plug Power Inc. before the U.S. House Appropriations Subcommittee of Energy and Water Development March 17, 2021 Good afternoon. Thank you to Chairwoman Kaptur, Ranking Member Simpson, and the entire Subcommittee for inviting me to testify before you today regarding Domestic Manufacturing for a Clean Energy Future and ongoing work within the U.S. Department of Energy’s (DOE) Hydrogen and Fuel Cell Technologies Office (HFTO). I would like to begin by thanking the members of this committee for the opportunity to testify today and to discuss the exciting economic and environmental advantages that will benefit the United States as it employs hydrogen, thus decarbonizing its economy in the coming years. The federal government has a critical role to play in this process. Our team looks forward to working with you as you explore ways to accelerate deployment of clean hydrogen and fuel cell technologies across a wide spectrum of industries and economic sectors. Background and Introduction My name is Tim Cortes. Since 2015, I have been with Plug Power, Inc, and am currently the Chief Technology Officer. In my position, I am responsible for the company’s long-term technology strategy and vision. When I joined the team, I was tasked with building a world class hydrogen business. Today, I am proud to say that we have developed an excellent management team focused on the installation, engineering and service of Plug Power’s hydrogen fueling systems. As I will discuss later, we have grown significantly since our inception, expanding our vision to include our manufacturing capabilities. -

A Camera-Realistic Robotics Simulator for Cinematographic Purposes
2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) October 25-29, 2020, Las Vegas, NV, USA (Virtual) CinemAirSim: A Camera-Realistic Robotics Simulator for Cinematographic Purposes Pablo Pueyo, Eric Cristofalo, Eduardo Montijano, and Mac Schwager Abstract— Unmanned Aerial Vehicles (UAVs) are becoming increasingly popular in the film and entertainment industries, in part because of their maneuverability and perspectives they en- able. While there exists methods for controlling the position and orientation of the drones for visibility, other artistic elements of the filming process, such as focal blur, remain unexplored in the robotics community. The lack of cinematographic robotics solutions is partly due to the cost associated with the cameras and devices used in the filming industry, but also because state- of-the-art photo-realistic robotics simulators only utilize a full in-focus pinhole camera model which does not incorporate these desired artistic attributes. To overcome this, the main contribution of this work is to endow the well-known drone simulator, AirSim, with a cinematic camera as well as extend its API to control all of its parameters in real time, including various filming lenses and common cinematographic properties. Fig. 1. CinemAirSim allows to simulate a cinematic camera inside AirSim. In this paper, we detail the implementation of our AirSim Users can control lens parameters like the focal length, focus distance or modification, CinemAirSim, present examples that illustrate aperture, in real time. The figure shows a reproduction of a scene from “The the potential of the new tool, and highlight the new research Revenant”. We illustrate the filming drone (top left), the current camera opportunities that the use of cinematic cameras can bring to parameters (top right), the movie frame (bottom left) and simulated frame research in robotics and control. -

ORCA - a Physics-Based Robotics Simulation Environment That Supports Distributed Systems Development
Journal of Software Engineering for Robotics 5(2), September 2014, 13-24 ISSN: 2035-3928 ORCA - a physics-based robotics simulation environment that supports distributed systems development E. Hourdakis1 G. Chliveros1 P. Trahanias1;2 1 Institute of Computer Science, Foundation for Research and Technology, Greece 2 Department of Computer Science, University of Crete, Greece Abstract—Physics-based simulation is becoming an indispensable tool in robotics research, since it enables the evaluation of algorithms in silico, even when the actual robot is not available. Due to this, it is considered a standard practice, prior to any deployment on hardware platforms, and an important part of the development activities in large-scale projects. To cope with this role, simulators must address additional issues related to large-scale model development, including multi-modal processing, provisions for algorithmic integration, and fast, scalable graphics. In the current paper we present ORCA, a versatile, physics-based robotics simulator that integrates a server and a simulation environment into one package. This type of architecture makes the sharing of resources a seamless task, promotes code re-use, and facilitates the integration of individual software modules. To demonstrate the software’s applicability, we discuss three different use-cases, in which ORCA was used at the heart of their development efforts. Index Terms—Physics simulation, robotics, sensor modeling, graphics, distributed processing. 1 INTRODUCTION starting to claim an increased share of the development activ- ities in robotics, which can involve large-scale and integrated UE to the upsurge in processing power, physics engines systems. As such, they must consider issues related to the and CAD modeling software, robotic simulators are D distributed nature of software workflow, for example the ability increasingly being used as a cost-free alternative to actual to facilitate algorithmic integration or process several complex robotic platforms [1], [2]. -

Design of a Low-Cost Unmanned Surface Vehicle for Swarm Robotics Research in Laboratory Environments
DESIGN OF A LOW-COST UNMANNED SURFACE VEHICLE FOR SWARM ROBOTICS RESEARCH IN LABORATORY ENVIRONMENTS by c Calvin Gregory A thesis submitted to the School of Graduate Studies in partial fulfilment of the requirements for the degree of Master of Engineering Faculty of Engineering and Applied Science Memorial University of Newfoundland October 2020 St. John's Newfoundland Abstract Swarm robotics is the study of groups of simple, typically inexpensive agents working collaboratively toward a common goal. Such systems offer several benefits over single- robot solutions: they are flexible, scalable, and robust to the failure of individual agents. The majority of existing work in this field has focused on robots operating in terrestrial environments but the benefits of swarm systems extend to applications in the marine domain as well. The current scarcity of marine robotics platforms suitable for swarm research is detrimental to progress in this field. Of the few that exist, no publicly available unmanned surface vehicles can operate in a laboratory environment; an indoor tank of water where the vessels, temperature, lighting, etc. can be observed and controlled at all times. Laboratory testing is a common intermediate step in the hardware validation of algorithms. This thesis details the design of the microUSV: a small, inexpensive, laboratory-based platform developed to fill this gap. The microUSV system was validated by performing laboratory testing of two algo- rithms: a waypoint-following controller and orbital retrieval. The waypoint-following controller was a simple PI controller implementation which corrects a vessel's speed and heading to seek predetermined goal positions. The orbital retrieval algorithm is a novel method for a swarm of unmanned surface vehicles to gather floating marine contaminants such as plastics. -

The Arms Industry and Increasingly Autonomous Weapons
Slippery Slope The arms industry and increasingly autonomous weapons www.paxforpeace.nl Reprogramming War This report is part of a PAX research project on the development of lethal autonomous weapons. These weapons, which would be able to kill people without any direct human involvement, are highly controversial. Many experts warn that they would violate fundamental legal and ethical principles and would be a destabilising threat to international peace and security. In a series of four reports, PAX analyses the actors that could potentially be involved in the development of these weapons. Each report looks at a different group of actors, namely states, the tech sector, the arms industry, and universities and research institutes. The present report focuses on the arms industry. Its goal is to inform the ongoing debate with facts about current developments within the defence sector. It is the responsibility of companies to be mindful of the potential applications of certain new technologies and the possible negative effects when applied to weapon systems. They must also clearly articulate where they draw the line to ensure that humans keep control over the use of force by weapon systems. If you have any questions regarding this project, please contact Daan Kayser ([email protected]). Colophon November 2019 ISBN: 978-94-92487-46-9 NUR: 689 PAX/2019/14 Author: Frank Slijper Thanks to: Alice Beck, Maaike Beenes and Daan Kayser Cover illustration: Kran Kanthawong Graphic design: Het IJzeren Gordijn © PAX This work is available under the Creative Commons Attribution 4.0 license (CC BY 4.0) https://creativecommons.org/licenses/ by/4.0/deed.en We encourage people to share this information widely and ask that it be correctly cited when shared. -

Design Industrial Robotics Applications with MATLAB and Simulink
Design Industrial Robotics Applications with MATLAB and Simulink Presenter Name Here Trends in Industrial Robotics Cobots Grow fastest in shipment terms with CAGR of 20% from 2017 - 2023 Growing trend toward compact robots Increasing share of units shipped in 2023 will be payload <10kg 40% of 80% of 82% of Articulated Robots SCARA Robots Cobots Source: Interact Analysis 2 Evolution of Industrial Robotics Technologies Full Autonomy AI-enabled robots High Autonomy Conditional Autonomy Partial Autonomy Cobot UR5 1st Cobot at Linatex, 2008 1961 Human Assistant Traditional Industrial Robots - Automation Unimate at GM, 1961 No Automation 1961 2008 2019- 3 Autonomous Industrial Robotics Systems Workflow Operates independently, without explicit instructions from a human Connect/Deploy Code Generation ROS Autonomous Algorithms Sense (Observe) Perceive (Orient) Plan (Decide) Control (Act) Encoder Camera Environment Localization Feedback Controls Understanding Force/Torque Contact Path Planning Decision Logic Sensor Switches Object Gain Scheduling Proximity Sensors Detection/Tracking Obstacle Avoidance Trajectory Control S1 S3 S2 Platform Prototype HW Physical Model Actuation Model Environ Model Production HW 4 What we’ll discuss today 01 Challenges in Industry Robot System Design 02 Model-Based Design for Autonomous System Case Study: Pick-and- 03 Place Manipulation Application 04 Concluding Remarks 5 What we’ll discuss today 01 Challenges in Industry Robot System Design 02 Model-Based Design for Autonomous System Case Study: Pick-and- 03 Place