Me338a Continuum Mechanics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Modeling Conservation of Mass
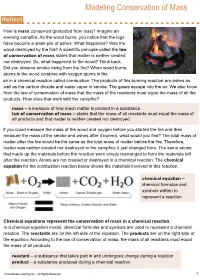
Modeling Conservation of Mass How is mass conserved (protected from loss)? Imagine an evening campfire. As the wood burns, you notice that the logs have become a small pile of ashes. What happened? Was the wood destroyed by the fire? A scientific principle called the law of conservation of mass states that matter is neither created nor destroyed. So, what happened to the wood? Think back. Did you observe smoke rising from the fire? When wood burns, atoms in the wood combine with oxygen atoms in the air in a chemical reaction called combustion. The products of this burning reaction are ashes as well as the carbon dioxide and water vapor in smoke. The gases escape into the air. We also know from the law of conservation of mass that the mass of the reactants must equal the mass of all the products. How does that work with the campfire? mass – a measure of how much matter is present in a substance law of conservation of mass – states that the mass of all reactants must equal the mass of all products and that matter is neither created nor destroyed If you could measure the mass of the wood and oxygen before you started the fire and then measure the mass of the smoke and ashes after it burned, what would you find? The total mass of matter after the fire would be the same as the total mass of matter before the fire. Therefore, matter was neither created nor destroyed in the campfire; it just changed form. The same atoms that made up the materials before the reaction were simply rearranged to form the materials left after the reaction. -

Derivation of Fluid Flow Equations
TPG4150 Reservoir Recovery Techniques 2017 1 Fluid Flow Equations DERIVATION OF FLUID FLOW EQUATIONS Review of basic steps Generally speaking, flow equations for flow in porous materials are based on a set of mass, momentum and energy conservation equations, and constitutive equations for the fluids and the porous material involved. For simplicity, we will in the following assume isothermal conditions, so that we not have to involve an energy conservation equation. However, in cases of changing reservoir temperature, such as in the case of cold water injection into a warmer reservoir, this may be of importance. Below, equations are initially described for single phase flow in linear, one- dimensional, horizontal systems, but are later on extended to multi-phase flow in two and three dimensions, and to other coordinate systems. Conservation of mass Consider the following one dimensional rod of porous material: Mass conservation may be formulated across a control element of the slab, with one fluid of density ρ is flowing through it at a velocity u: u ρ Δx The mass balance for the control element is then written as: ⎧Mass into the⎫ ⎧Mass out of the ⎫ ⎧ Rate of change of mass⎫ ⎨ ⎬ − ⎨ ⎬ = ⎨ ⎬ , ⎩element at x ⎭ ⎩element at x + Δx⎭ ⎩ inside the element ⎭ or ∂ {uρA} − {uρA} = {φAΔxρ}. x x+ Δx ∂t Dividing by Δx, and taking the limit as Δx approaches zero, we get the conservation of mass, or continuity equation: ∂ ∂ − (Aρu) = (Aφρ). ∂x ∂t For constant cross sectional area, the continuity equation simplifies to: ∂ ∂ − (ρu) = (φρ) . ∂x ∂t Next, we need to replace the velocity term by an equation relating it to pressure gradient and fluid and rock properties, and the density and porosity terms by appropriate pressure dependent functions. -

Law of Conversation of Energy
Law of Conservation of Mass: "In any kind of physical or chemical process, mass is neither created nor destroyed - the mass before the process equals the mass after the process." - the total mass of the system does not change, the total mass of the products of a chemical reaction is always the same as the total mass of the original materials. "Physics for scientists and engineers," 4th edition, Vol.1, Raymond A. Serway, Saunders College Publishing, 1996. Ex. 1) When wood burns, mass seems to disappear because some of the products of reaction are gases; if the mass of the original wood is added to the mass of the oxygen that combined with it and if the mass of the resulting ash is added to the mass o the gaseous products, the two sums will turn out exactly equal. 2) Iron increases in weight on rusting because it combines with gases from the air, and the increase in weight is exactly equal to the weight of gas consumed. Out of thousands of reactions that have been tested with accurate chemical balances, no deviation from the law has ever been found. Law of Conversation of Energy: The total energy of a closed system is constant. Matter is neither created nor destroyed – total mass of reactants equals total mass of products You can calculate the change of temp by simply understanding that energy and the mass is conserved - it means that we added the two heat quantities together we can calculate the change of temperature by using the law or measure change of temp and show the conservation of energy E1 + E2 = E3 -> E(universe) = E(System) + E(Surroundings) M1 + M2 = M3 Is T1 + T2 = unknown (No, no law of conservation of temperature, so we have to use the concept of conservation of energy) Total amount of thermal energy in beaker of water in absolute terms as opposed to differential terms (reference point is 0 degrees Kelvin) Knowns: M1, M2, T1, T2 (Kelvin) When add the two together, want to know what T3 and M3 are going to be. -

Foundations of Continuum Mechanics
Foundations of Continuum Mechanics • Concerned with material bodies (solids and fluids) which can change shape when loaded, and view is taken that bodies are continuous bodies. • Commonly known that matter is made up of discrete particles, and only known continuum is empty space. • Experience has shown that descriptions based on continuum modeling is useful, provided only that variation of field quantities on the scale of deformation mechanism is small in some sense. Goal of continuum mechanics is to solve BVP. The main steps are 1. Mathematical preliminaries (Tensor theory) 2. Kinematics 3. Balance laws and field equations 4. Constitutive laws (models) Mathematical structure adopted to ensure that results are coordinate invariant and observer invariant and are consistent with material symmetries. Vector and Tensor Theory Most tensors of interest in continuum mechanics are one of the following type: 1. Symmetric – have 3 real eigenvalues and orthogonal eigenvectors (eg. Stress) 2. Skew-Symmetric – is like a vector, has an associated axial vector (eg. Spin) 3. Orthogonal – describes a transformation of basis (eg. Rotation matrix) → 3 3 3 u = ∑uiei = uiei T = ∑∑Tijei ⊗ e j = Tijei ⊗ e j i=1 ~ ij==1 1 When the basis ei is changed, the components of tensors and vectors transform in a specific way. Certain quantities remain invariant – eg. trace, determinant. Gradient of an nth order tensor is a tensor of order n+1 and divergence of an nth order tensor is a tensor of order n-1. ∂ui ∂ui ∂Tij ∇ ⋅u = ∇ ⊗ u = ei ⊗ e j ∇ ⋅ T = e j ∂xi ∂x j ∂xi Integral (divergence) Theorems: T ∫∫RR∇ ⋅u dv = ∂ u⋅n da ∫∫RR∇ ⊗ u dv = ∂ u ⊗ n da ∫∫RR∇ ⋅ T dv = ∂ T n da Kinematics The tensor that plays the most important role in kinematics is the Deformation Gradient x(X) = X + u(X) F = ∇X ⊗ x(X) = I + ∇X ⊗ u(X) F can be used to determine 1. -

Pacific Northwest National Laboratory Operated by Battelie for the U.S
PNNL-11668 UC-2030 Pacific Northwest National Laboratory Operated by Battelie for the U.S. Department of Energy Seismic Event-Induced Waste Response and Gas Mobilization Predictions for Typical Hanf ord Waste Tank Configurations H. C. Reid J. E. Deibler 0C1 1 0 W97 OSTI September 1997 •-a Prepared for the US. Department of Energy under Contract DE-AC06-76RLO1830 1» DISCLAIMER This report was prepared as an account of work sponsored by an agency of the United States Government, Neither the United States Government nor any agency thereof, nor Battelle Memorial Institute, nor any of their employees, makes any warranty, express or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States Government or any agency thereof, or Battelle Memorial Institute. The views and opinions of authors expressed herein do not necessarily state or reflect those of the United States Government or any agency thereof. PACIFIC NORTHWEST NATIONAL LABORATORY operated by BATTELLE for the UNITED STATES DEPARTMENT OF ENERGY under Contract DE-AC06-76RLO 1830 Printed in the United States of America Available to DOE and DOE contractors from the Office of Scientific and Technical Information, P.O. Box 62, Oak Ridge, TN 37831; prices available from (615) 576-8401, Available to the public from the National Technical Information Service, U.S. -
Hydrostatic Forces on Surface
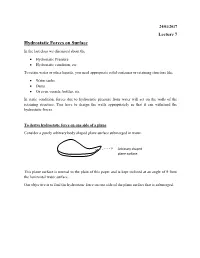
24/01/2017 Lecture 7 Hydrostatic Forces on Surface In the last class we discussed about the Hydrostatic Pressure Hydrostatic condition, etc. To retain water or other liquids, you need appropriate solid container or retaining structure like Water tanks Dams Or even vessels, bottles, etc. In static condition, forces due to hydrostatic pressure from water will act on the walls of the retaining structure. You have to design the walls appropriately so that it can withstand the hydrostatic forces. To derive hydrostatic force on one side of a plane Consider a purely arbitrary body shaped plane surface submerged in water. Arbitrary shaped plane surface This plane surface is normal to the plain of this paper and is kept inclined at an angle of θ from the horizontal water surface. Our objective is to find the hydrostatic force on one side of the plane surface that is submerged. (Source: Fluid Mechanics by F.M. White) Let ‘h’ be the depth from the free surface to any arbitrary element area ‘dA’ on the plane. Pressure at h(x,y) will be p = pa + ρgh where, pa = atmospheric pressure. For our convenience to make various points on the plane, we have taken the x-y coordinates accordingly. We also introduce a dummy variable ξ that show the inclined distance of the arbitrary element area dA from the free surface. The total hydrostatic force on one side of the plane is F pdA where, ‘A’ is the total area of the plane surface. A This hydrostatic force is similar to application of continuously varying load on the plane surface (recall solid mechanics). -

Key Concepts: Conservation of Mass, Momentum, Energy Fluid: a Material
Key concepts: Conservation of mass, momentum, energy Fluid: a material that deforms continuously and permanently under the application of a shearing stress, no matter how small. Fluids are either gases or liquids. (Under very specialized conditions, a phase of intermediate properties can be stable, but we won’t consider that possibility.) In liquids, the molecules are relatively closely spaced, allowing the magnitude of their (attractive, electrically-based) interaction energy to be of the same magnitude as their kinetic energy. As a result, they exist as a loose collection of clusters. In gases, the molecules are much more widely separated, so the kinetic energy (at a given temperature, identical to that in the liquid) is far greater than the interaction energy (much less than in the liquid), and molecule do not form clusters. In a liquid, the molecules themselves typically occupy a few percent of the total space available; in a gas, they occupy a few thousandths of a percent. Nevertheless, for our purposes, all fluids are considered to be continua (no voids or holes).The absence of significant intermolecular attraction allows gases to fill whatever volume is available to them, whereas the presence of such attraction in liquids prevents them from doing so. The attractive forces in liquid water are unusually strong, compared to other liquids. Properties of Fluids: m Density is mass/volume: ρ = . The density of liquid water is V 3 o −3 3 ~1.0 kg/m ; that of air at 20 C is ~1.2x10 kg/m . mg W Specific weight is weight/volume: γ = = = ρg V V C:\Adata\CLASNOTE\342\Class Notes\Key concepts_Topic 1.doc 1 γ Specific gravity is density normalized to the density of water: sg..= i γ w V 1 Specific volume is volume/mass: V = = m ρ Bulk modulus or modulus of elasticity is the pressure change per dp dp fractional change in volume or density: E =− = . -

Continuity Equation in Pressure Coordinates
Continuity Equation in Pressure Coordinates Here we will derive the continuity equation from the principle that mass is conserved for a parcel following the fluid motion (i.e., there is no flow across the boundaries of the parcel). This implies that δxδyδp δM = ρ δV = ρ δxδyδz = − g is conserved following the fluid motion: 1 d(δM ) = 0 δM dt 1 d()δM = 0 δM dt g d ⎛ δxδyδp ⎞ ⎜ ⎟ = 0 δxδyδp dt ⎝ g ⎠ 1 ⎛ d(δp) d(δy) d(δx)⎞ ⎜δxδy +δxδp +δyδp ⎟ = 0 δxδyδp ⎝ dt dt dt ⎠ 1 ⎛ dp ⎞ 1 ⎛ dy ⎞ 1 ⎛ dx ⎞ δ ⎜ ⎟ + δ ⎜ ⎟ + δ ⎜ ⎟ = 0 δp ⎝ dt ⎠ δy ⎝ dt ⎠ δx ⎝ dt ⎠ Taking the limit as δx, δy, δp → 0, ∂u ∂v ∂ω Continuity equation + + = 0 in pressure ∂x ∂y ∂p coordinates 1 Determining Vertical Velocities • Typical large-scale vertical motions in the atmosphere are of the order of 0. 01-01m/s0.1 m/s. • Such motions are very difficult, if not impossible, to measure directly. Typical observational errors for wind measurements are ~1 m/s. • Quantitative estimates of vertical velocity must be inferred from quantities that can be directly measured with sufficient accuracy. Vertical Velocity in P-Coordinates The equivalent of the vertical velocity in p-coordinates is: dp ∂p r ∂p ω = = +V ⋅∇p + w dt ∂t ∂z Based on a scaling of the three terms on the r.h.s., the last term is at least an order of magnitude larger than the other two. Making the hydrostatic approximation yields ∂p ω ≈ w = −ρgw ∂z Typical large-scale values: for w, 0.01 m/s = 1 cm/s for ω, 0.1 Pa/s = 1 μbar/s 2 The Kinematic Method By integrating the continuity equation in (x,y,p) coordinates, ω can be obtained from the mean divergence in a layer: ⎛ ∂u ∂v ⎞ ∂ω ⎜ + ⎟ + = 0 continuity equation in (x,y,p) coordinates ⎝ ∂x ∂y ⎠ p ∂p p2 p2 ⎛ ∂u ∂v ⎞ ∂ω = − ⎜ + ⎟ ∂p rearrange and integrate over the layer ∫p ∫ ⎜ ⎟ 1 ∂x ∂y p1⎝ ⎠ p ⎛ ∂u ∂v ⎞ ω(p )−ω(p ) = (p − p )⎜ + ⎟ overbar denotes pressure- 2 1 1 2 ⎜ ⎟ weighted vertical average ⎝ ∂x ∂y ⎠ p To determine vertical motion at a pressure level p2, assume that p1 = surface pressure and there is no vertical motion at the surface. -

Ch. 8 Deflections Due to Bending
446.201A (Solid Mechanics) Professor Youn, Byeng Dong CH. 8 DEFLECTIONS DUE TO BENDING Ch. 8 Deflections due to bending 1 / 27 446.201A (Solid Mechanics) Professor Youn, Byeng Dong 8.1 Introduction i) We consider the deflections of slender members which transmit bending moments. ii) We shall treat statically indeterminate beams which require simultaneous consideration of all three of the steps (2.1) iii) We study mechanisms of plastic collapse for statically indeterminate beams. iv) The calculation of the deflections is very important way to analyze statically indeterminate beams and confirm whether the deflections exceed the maximum allowance or not. 8.2 The Moment – Curvature Relation ▶ From Ch.7 à When a symmetrical, linearly elastic beam element is subjected to pure bending, as shown in Fig. 8.1, the curvature of the neutral axis is related to the applied bending moment by the equation. ∆ = = = = (8.1) ∆→ ∆ For simplification, → ▶ Simplification i) When is not a constant, the effect on the overall deflection by the shear force can be ignored. ii) Assume that although M is not a constant the expressions defined from pure bending can be applied. Ch. 8 Deflections due to bending 2 / 27 446.201A (Solid Mechanics) Professor Youn, Byeng Dong ▶ Differential equations between the curvature and the deflection 1▷ The case of the large deflection The slope of the neutral axis in Fig. 8.2 (a) is = Next, differentiation with respect to arc length s gives = ( ) ∴ = → = (a) From Fig. 8.2 (b) () = () + () → = 1 + Ch. 8 Deflections due to bending 3 / 27 446.201A (Solid Mechanics) Professor Youn, Byeng Dong → = (b) (/) & = = (c) [(/)]/ If substitutng (b) and (c) into the (a), / = = = (8.2) [(/)]/ [()]/ ∴ = = [()]/ When the slope angle shown in Fig. -

Chapter 3 Newtonian Fluids
CM4650 Chapter 3 Newtonian Fluid 2/5/2018 Mechanics Chapter 3: Newtonian Fluids CM4650 Polymer Rheology Michigan Tech Navier-Stokes Equation v vv p 2 v g t 1 © Faith A. Morrison, Michigan Tech U. Chapter 3: Newtonian Fluid Mechanics TWO GOALS •Derive governing equations (mass and momentum balances •Solve governing equations for velocity and stress fields QUICK START V W x First, before we get deep into 2 v (x ) H derivation, let’s do a Navier-Stokes 1 2 x1 problem to get you started in the x3 mechanics of this type of problem solving. 2 © Faith A. Morrison, Michigan Tech U. 1 CM4650 Chapter 3 Newtonian Fluid 2/5/2018 Mechanics EXAMPLE: Drag flow between infinite parallel plates •Newtonian •steady state •incompressible fluid •very wide, long V •uniform pressure W x2 v1(x2) H x1 x3 3 EXAMPLE: Poiseuille flow between infinite parallel plates •Newtonian •steady state •Incompressible fluid •infinitely wide, long W x2 2H x1 x3 v (x ) x1=0 1 2 x1=L p=Po p=PL 4 2 CM4650 Chapter 3 Newtonian Fluid 2/5/2018 Mechanics Engineering Quantities of In more complex flows, we can use Interest general expressions that work in all cases. (any flow) volumetric ⋅ flow rate ∬ ⋅ | average 〈 〉 velocity ∬ Using the general formulas will Here, is the outwardly pointing unit normal help prevent errors. of ; it points in the direction “through” 5 © Faith A. Morrison, Michigan Tech U. The stress tensor was Total stress tensor, Π: invented to make the calculation of fluid stress easier. Π ≡ b (any flow, small surface) dS nˆ Force on the S ⋅ Π surface V (using the stress convention of Understanding Rheology) Here, is the outwardly pointing unit normal of ; it points in the direction “through” 6 © Faith A. -

Topics in Solid Mechanics: Elasticity, Plasticity, Damage, Nano and Biomechanics
Topics in Solid Mechanics: Elasticity, Plasticity, Damage, Nano and Biomechanics Vlado A. Lubarda Montenegrin Academy of Sciences and Arts Division of Natural Sciencies OPN, CANU 2012 Contents Preface xi Part 1. LINEAR ELASTICITY 1 Chapter 1. Anisotropic Nonuniform Lam´eProblem 2 1.1. Elastic Anisotropy 2 1.2. Radial Nonuniformity 3 1.3. Governing Differential Equations 4 1.4. Stress and Displacement Expressions 5 1.5. Traction Boundary Conditions 6 1.6. Applied External Pressure 7 1.7. Plane Stress Approximation 8 1.8. Generalized Plane Stress 10 References 11 Chapter 2. Stretching of a Hollow Circular Membrane 12 2.1. Introduction 12 2.2. Basic Equations 12 2.3. Traction Boundary Conditions 13 2.4. Mixed Boundary Conditions 16 References 18 Chapter 3. Energy of Circular Inclusion with Sliding Interface 21 3.1. Energy Expressions for Sliding Inclusion 21 3.2. Energies due to Eigenstrain 22 3.3. Energies due to Remote Loading 23 3.4. Inhomogeneity under Remote Loading 25 References 26 Chapter 4. Eigenstrain Problem for Nonellipsoidal Inclusions 27 4.1. Eshelby Property 27 4.2. Displacement Expression 27 4.3. The Shape of an Inclusion 28 4.4. Other Shapes of Inclusions 30 References 32 Chapter 5. Circular Loads on the Surface of a Half-Space 33 5.1. Displacements due to Vertical Ring Load 33 5.2. Alternative Displacement Expressions 34 iii iv CONTENTS 5.3. Tangential Line Load 37 5.4. Alternative Expressions 39 5.5. Reciprocal Properties 43 References 45 Chapter 6. Elasticity Tensors of Anisotropic Materials 46 6.1. Elastic Moduli of Transversely Isotropic Materials 46 6.2. -

Chapter 15 - Fluid Mechanics Thursday, March 24Th
Chapter 15 - Fluid Mechanics Thursday, March 24th •Fluids – Static properties • Density and pressure • Hydrostatic equilibrium • Archimedes principle and buoyancy •Fluid Motion • The continuity equation • Bernoulli’s effect •Demonstration, iClicker and example problems Reading: pages 243 to 255 in text book (Chapter 15) Definitions: Density Pressure, ρ , is defined as force per unit area: Mass M ρ = = [Units – kg.m-3] Volume V Definition of mass – 1 kg is the mass of 1 liter (10-3 m3) of pure water. Therefore, density of water given by: Mass 1 kg 3 −3 ρH O = = 3 3 = 10 kg ⋅m 2 Volume 10− m Definitions: Pressure (p ) Pressure, p, is defined as force per unit area: Force F p = = [Units – N.m-2, or Pascal (Pa)] Area A Atmospheric pressure (1 atm.) is equal to 101325 N.m-2. 1 pound per square inch (1 psi) is equal to: 1 psi = 6944 Pa = 0.068 atm 1atm = 14.7 psi Definitions: Pressure (p ) Pressure, p, is defined as force per unit area: Force F p = = [Units – N.m-2, or Pascal (Pa)] Area A Pressure in Fluids Pressure, " p, is defined as force per unit area: # Force F p = = [Units – N.m-2, or Pascal (Pa)] " A8" rea A + $ In the presence of gravity, pressure in a static+ 8" fluid increases with depth. " – This allows an upward pressure force " to balance the downward gravitational force. + " $ – This condition is hydrostatic equilibrium. – Incompressible fluids like liquids have constant density; for them, pressure as a function of depth h is p p gh = 0+ρ p0 = pressure at surface " + Pressure in Fluids Pressure, p, is defined as force per unit area: Force F p = = [Units – N.m-2, or Pascal (Pa)] Area A In the presence of gravity, pressure in a static fluid increases with depth.