Shape Analysis, Moving Frames and Infinite-Dimensional Geometry
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Moving Parseval Frames for Vector Bundles
Houston Journal of Mathematics c 2014 University of Houston Volume 40, No. 3, 2014 MOVING PARSEVAL FRAMES FOR VECTOR BUNDLES D. FREEMAN, D. POORE, A. R. WEI, AND M. WYSE Communicated by Vern I. Paulsen Abstract. Parseval frames can be thought of as redundant or linearly de- pendent coordinate systems for Hilbert spaces, and have important appli- cations in such areas as signal processing, data compression, and sampling theory. We extend the notion of a Parseval frame for a fixed Hilbert space to that of a moving Parseval frame for a vector bundle over a manifold. Many vector bundles do not have a moving basis, but in contrast to this every vector bundle over a paracompact manifold has a moving Parseval frame. We prove that a sequence of sections of a vector bundle is a moving Parseval frame if and only if the sections are the orthogonal projection of a moving orthonormal basis for a larger vector bundle. In the case that our vector bundle is the tangent bundle of a Riemannian manifold, we prove that a sequence of vector fields is a Parseval frame for the tangent bundle of a Riemannian manifold if and only if the vector fields are the orthogonal projection of a moving orthonormal basis for the tangent bundle of a larger Riemannian manifold. 1. Introduction Frames for Hilbert spaces are essentially redundant coordinate systems. That is, every vector can be represented as a series of scaled frame vectors, but the series is not unique. Though this redundancy is not necessary in a coordinate system, it can actually be very useful. -
Chapter 2: Minkowski Spacetime
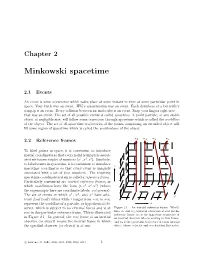
Chapter 2 Minkowski spacetime 2.1 Events An event is some occurrence which takes place at some instant in time at some particular point in space. Your birth was an event. JFK's assassination was an event. Each downbeat of a butterfly’s wingtip is an event. Every collision between air molecules is an event. Snap your fingers right now | that was an event. The set of all possible events is called spacetime. A point particle, or any stable object of negligible size, will follow some trajectory through spacetime which is called the worldline of the object. The set of all spacetime trajectories of the points comprising an extended object will fill some region of spacetime which is called the worldvolume of the object. 2.2 Reference frames w 1 w 2 w 3 w 4 To label points in space, it is convenient to introduce spatial coordinates so that every point is uniquely associ- ated with some triplet of numbers (x1; x2; x3). Similarly, to label events in spacetime, it is convenient to introduce spacetime coordinates so that every event is uniquely t associated with a set of four numbers. The resulting spacetime coordinate system is called a reference frame . Particularly convenient are inertial reference frames, in which coordinates have the form (t; x1; x2; x3) (where the superscripts here are coordinate labels, not powers). The set of events in which x1, x2, and x3 have arbi- x 1 trary fixed (real) values while t ranges from −∞ to +1 represent the worldline of a particle, or hypothetical ob- x 2 server, which is subject to no external forces and is at Figure 2.1: An inertial reference frame. -
The Light Cone and the Conformal Sphere: Differential Invariants And
Light cone and conformal sphere The Light Cone and the Conformal Sphere: Differential Invariants and their Relations Theresa C. Anderson April, 2010 Theresa C. Anderson The Light Cone and the Conformal Sphere: Differential Invariants and their Relations Light cone and conformal sphere Motivation: The recent concept of the group-based moving frame as an equivariant map, introduced by Fels and Olver, has been a useful aid in the quest for differential invariants. The moving frame is used to construct the Maurer-Cartan matrix K; which according to a theorem of Hubert, contains all generators for the differential invariants of a curve. Here we employ the normalization technique of Fels and Olver to construct group-based moving frames for the light cone and the conformal 2-sphere, and we use the moving frame to find the differential invariants. Theresa C. Anderson The Light Cone and the Conformal Sphere: Differential Invariants and their Relations Euclidean space admits a natural action from the Euclidean group, the group of rigid transformations (rotations and translations). Light cone and conformal sphere We first recall the following definition and theorem: A classical moving frame on a n-manifold is a set of n vectors along a curve which is invariant under an action by the group (such as a rigid motion in the Euclidean case). Theresa C. Anderson The Light Cone and the Conformal Sphere: Differential Invariants and their Relations Light cone and conformal sphere We first recall the following definition and theorem: A classical moving frame on a n-manifold is a set of n vectors along a curve which is invariant under an action by the group (such as a rigid motion in the Euclidean case). -

Moving Frames
Moving Frames Peter J. Olver University of Minnesota http://www.math.umn.edu/ ∼ olver Benasque, September 2009 History of Moving Frames Classical contributions: M. Bartels (∼1800), J. Serret, J. Fr´enet, G. Darboux, ´ E. Cotton, El´ ie Cartan Modern developments: (1970’s) S.S. Chern, M. Green, P. Griffiths, G. Jensen, T. Ivey, J. Landsberg, . The equivariant approach: (1997 – ) PJO, M. Fels, G. Mar´ı–Beffa, I. Kogan, J. Cheh, J. Pohjanpelto, P. Kim, M. Boutin, D. Lewis, E. Mansfield, E. Hubert, E. Shemyakova, O. Morozov, R. McLenaghan, R. Smirnov, J. Yue, A. Nikitin, J. Patera, P. Vassiliou, . Moving Frame — Space Curves t b tangent normal binormal dz d2z n t = n = b = t × n ds ds2 s — arc length Fr´enet–Serret equations dt dn db = κ n = − κ t + τ b = − τ n ds ds ds κ — curvature τ — torsion Moving Frame — Space Curves t b tangent normal binormal dz d2z n t = n = b = t × n ds ds2 s — arc length z Fr´enet–Serret equations dt dn db = κ n = − κ t + τ b = − τ n ds ds ds κ — curvature τ — torsion “I did not quite understand how he [Cartan] does this in general, though in the examples he gives the procedure is clear.” “Nevertheless, I must admit I found the book, like most of Cartan’s papers, hard reading.” — Hermann Weyl “Cartan on groups and differential geometry” Bull. Amer. Math. Soc. 44 (1938) 598–601 Applications of Moving Frames • Differential geometry • Equivalence • Symmetry • Differential invariants • Rigidity • Identities and syzygies • Joint invariants and semi-differential invariants • Invariant differential forms and tensors • Integral invariants • Classical invariant theory • Computer vision ◦ object recognition ◦ symmetry detection • Invariant variational problems • Invariant numerical methods • Mechanics, including DNA • Poisson geometry & solitons • Killing tensors in relativity • Invariants of Lie algebras in quantum mechanics • Control theory • Lie pseudo-groups The Basic Equivalence Problem M — smooth m-dimensional manifold. -

Moving Frames Astérisque, Tome S131 (1985), P
Astérisque SHIING-SHEN CHERN Moving frames Astérisque, tome S131 (1985), p. 67-77 <http://www.numdam.org/item?id=AST_1985__S131__67_0> © Société mathématique de France, 1985, tous droits réservés. L’accès aux archives de la collection « Astérisque » (http://smf4.emath.fr/ Publications/Asterisque/) implique l’accord avec les conditions générales d’uti- lisation (http://www.numdam.org/conditions). Toute utilisation commerciale ou impression systématique est constitutive d’une infraction pénale. Toute copie ou impression de ce fichier doit contenir la présente mention de copyright. Article numérisé dans le cadre du programme Numérisation de documents anciens mathématiques http://www.numdam.org/ Société Mathématique de France Astérisque, hors série, 1985, p. 67-77 MOVING FRAMES BY Shiing-shen CHERN1 Introduction The method of moving frames has a long history. It is at the heart of kinematics and its conscious application to differential geometry could be traced back at least to SERRET and FRENET2. In his famous "Leçons sur la théorie des surfaces," based on lectures at the Sorbonne 1882-1885, DAR- BOUX had the revolutionary idea using frames depending on two parameters and integrability conditions turn up. DARBOUX'S method was generalized to arbitrary Lie groups by Emile COTTON [14] for the search of differen tial invariants, whose work should be considered a forerunner of the general method of moving frames. CARTAN'S first paper on moving frames was published in 1910 [7]. He im mediately observed that DARBOUX'S partial derivatives should be combined into the "Maurer-Cartan forms" and DARBOUX'S integrability conditions are essentially the Maurer-Cartan equations. This extends the method to the case where the ambient space is acted on by any Lie group and, more generally, by an infinite pseudogroup in CARTAN'S sense, such as the pseu- dogroup of all complex analytic automorphisms in n variables. -

Modern Developments in the Theory and Applications of Moving Frames
London Mathematical Society Impact150 Stories 1 (2015) 14{50 C 2015 Author(s) doi:10.1112/l150lms/l.0001 e Modern Developments in the Theory and Applications of Moving Frames Peter J. Olver Abstract This article surveys recent advances in the equivariant approach to the method of moving frames, concentrating on finite-dimensional Lie group actions. A sampling from the many current applications | to geometry, invariant theory, and image processing | will be presented. 1. Introduction. According to Akivis, [2], the method of rep`eresmobiles, which was translated into English as moving framesy, can be traced back to the moving trihedrons introduced by the Estonian mathematician Martin Bartels (1769{1836), a teacher of both Gauß and Lobachevsky. The apotheosis of the classical development can be found in the seminal advances of Elie´ Cartan, [25, 26], who forged earlier contributions by Frenet, Serret, Darboux, Cotton, and others into a powerful tool for analyzing the geometric properties of submanifolds and their invariants under the action of transformation groups. An excellent English language treatment of the Cartan approach can be found in the book by Guggenheimer, [49]. The 1970's saw the first attempts, cf. [29, 45, 46, 64], to place Cartan's constructions on a firm theoretical foundation. However, the method remained constrained within classical geometries and homogeneous spaces, e.g. Euclidean, equi-affine, or projective, [35]. In the late 1990's, I began to investigate how moving frames and all their remarkable consequences might be adapted to more general, non-geometrically-based group actions that arise in a broad range of applications. -

Moving Frame Equations in Three Dimensional General Inner Product Space
Archive of SID Moving Frame Equations in Three Dimensional General Inner Product Space Ali Parsian Department of Mathematics, Tafresh University, Tafresh, Iran. [email protected] Abstract In this paper, we are going to generalize the Frenet-Serret formulas for the moving frames in three dimensional space 푅3, in the case that the space admits the general form of inner product. Keywords: Covariant derivative, Moving frame, Vector field. www.SID.ir Archive of SID Preliminaries Vectors are used widely in physics and engineering to describe forces, velocities, angular momentum, and many other concepts. To obtain a definition that is both practical and precise, we shall describe an “arrow” in 푅3 by giving its starting point 푝 and the change, or vector 푣, necessary to reach its end point 푝 + 푣. Strictly speaking, 푣 is just a point of 푅3. A tangent 3 3 vector 푣푝 to 푅 consists of two points of 푅 : its vector part 푣 and its point of application 푝. A vector field 푉 on 푅3 is a map that assigns to each point 푝 of 푅3 a tangent vector 푉(푝) to 푅3 at 푝. There is a natural algebra of vector fields. At each point 푝, the values 푉(푝) and 푊(푝) are 3 in the same vector space, the tangent space 푇푝푅 , consequently, the formula for the addition is thus the same as for addition of maps, (푉 + 푊)(푝) = 푉(푝) + 푊(푝) or all 푝 ∈ 푅3. If 푓 is a real-valued map on 푅3 and 푉 is a vector field on 푅3, then 푓푉 is defined to be the vector field on 푅3 such that (푓푉)(푝) = 푓(푝)푉(푝) for all 푝 ∈ 푅3. -

The Light Sphere Paradox of Special Relatively
The Light Sphere Paradox Of Special Relatively By Harry H. Ricker III Email: [email protected] 1.0 Introduction This paper studies the light sphere paradox of Einstein's special theory of relativity and demonstrates that the failure to establish a correct mathematical analysis of this problem has allowed a major flaw in that theory to be turned into the foundational mathematical basis of that theory, which is unfortunately false and erroneous. 2.0 Background Unlike the much more famous paradox of the twins, the light sphere paradox is relatively unknown. It has not produced the volume of critical discussion or commanded the attention of critics of relativity that it deserves. The author could find only one reference to this paradox in an Internet search and only four references to it in his collection of relativity books. 2.1 Description Of Paradox Of The Spheres The best introductory discussion of the paradox is presented in Basic Concepts of Relativity, by R. H. Good, pages 39 and 40. Good asks the reader “Suppose a light pulse emitted from a stationary source at the origin at time t=0. It then spreads out with velocity c in a spherical wave front, as seen by an observer at rest relative to the source...Now an observer in another frame of reference moving uniformly in the x direction with velocity v relative to the first frame will also see a spherical wave front spreading out with the velocity c from the origin of his reference frame, assuming that the origins coincide at t=0. -

03. Simultaneity 0. Initial Concepts 3
Topics: 03. Simultaneity 0. Initial Concepts 3. Relativity of Simultaneity 1. Spacetime Diagrams 4. Tachyons & Causality 0. Initial Concepts 2. Composition of Velocities 5. Conventionality of Simultaneity (1) A spacetime is a 4-dim collection of points with additional structure. (2) A coordinate system is a way of assigning 3 spatial quantities and 1 temporal quantity to every event in spacetime. - So every point in spacetime is assigned 4 quantities: (x, y, z, t) 3 spatial 1 temporal (3) A reference frame is an object O that defines the origin of a coordinate system. t O x y 1 1. Spacetime Diagrams (a) Pick an origin O in spacetime. (b) Draw t-coordinate axis and x-axis (supress y- and z-axes for convenience). (c) Associate paths with trajectories ("worldlines") of objects in space and time. 1 change in � (d) Speed v of a world-line with respect to O = = ����� change in � t Δx Δt • x O A B C • Object A has speed vA = 0/t = 0. So object A is at rest with respect to O. • Object B has constant speed vB = Δx/Δt with respect to O. • Object C has non-constant slope, so it is in accelerated motion with respect to O. 2 • Convention: Pick units of O-coordinate system so that the worldline of a light signal is inclined 45° with respect to O-coordinate axes. • Speed of light c = 3×108m/s = 186,000mi/s = 1light-year/year = etc... t t worldline of light signal 1 sec OR 1 sec 45° 45° 45° 45° O O x 3×108m x 186×103miles t OR 1 year 45° 45° O 1 light-year x 3 2. -

Transformations and Coupling Relations for Affine Connections
Transformations and Coupling Relations for Affine Connections James Tao Harvard University, Cambridge, MA Jun Zhang University of Michigan, Ann Arbor, MI Send correspondence to: [email protected] Abstract. The statistical structure on a manifold M is predicated upon a special kind of coupling between the Riemannian metric g and a torsion-free affine connection r on the T M, such that rg is totally symmetric, forming, by definition, a \Codazzi pair" tr; gu. In this paper, we first investigate var- ious transformations of affine connections, including additive translation (by an arbitrary (1,2)-tensor K), multiplicative perturbation (through an arbitrary invertible operator L on T M), and conjugation (through a non-degenerate two-form h). We then study the Codazzi coupling of r with h and its cou- pling with L, and the link between these two couplings. We introduce, as special cases of K-translations, various transformations that generalize traditional projective and dual-projective transformations, and study their commutativity with L-perturbation and h-conjugation transformations. Our derivations al- low affine connections to carry torsion, and we investigate conditions under which torsions are preserved by the various transformations mentioned above. While reproducing some known results regarding Co- dazzi transform, conformal-projective transformation, etc., we extend much of these geometric relations, and hence obtain new geometric insights, for the general case of a non-degenerate two-form h (instead of the symmetric g) and an affine connection with possibly non-vanishing torsion. Our systematic ap- proach establishes a general setting for the study of Information Geometry based on transformations and coupling relations of affine connections. -

1 Riemannian Metric 2 Affine Connections
Math 6396 Riemannian Geometry, Metric, Connections, Curvature Tensors etc. By Min Ru, University of Houston 1 Riemannian Metric • A Riemannian metric on a differentiable manifold M is a symmetric, positive-definite, (smooth) (0, 2)-tensor fields g on M, i.e., for any vec- tor field X, Y ∈ Γ(TM), g(X, Y ) = g(Y, X), g(X, X) ≥ 0 where the equality holds if and only if X = 0. In terms of the local coordinates, g can be expressed by ! i j ∂ ∂ g = gijdx ⊗ dx , gij = g , , ∂xi ∂xj where gij = gji and the matrix (gij) is positive definite everywhere. • There exists a Riemannian metric on a differentiable manifold with countable basis (for the topology). 2 Affine Connections • A affine (or linear) connection 5 is a map 5 : Γ(TM) × Γ(TM) → Γ(TM) which satisfies, for all X, Y, Z ∈ Γ(TM) and f ∈ C∞(M), (a) 5X+fY Z = 5X Z + f 5Y Z, (b) 5X (Y + Z) = 5X Y + 5X Z, (c) 5X (fY ) = (Xf)Y + f 5X Y . 1 • Levi-Civita connection. Let (M, g) be a Riemannian manifold. Then there exists a unique connection (called the Levi-Civita connec- tion) such that (1) 5X Y − 5Y X = [X, Y ] (i.e. torsion free) (2) X < Y, Z >=< 5X Y, Z > + < Y, 5X Z > . Proof: We first make the following remark: Let α : Γ(TM) → C∞(M) be a C∞(M)-linear, regarding Γ(TM) as an C∞(M)-module. Then there exists a unique U ∈ Γ(TM) such that α(Z) =< U, Z > for every Z ∈ Γ(TM). -

Extending the Abilities of the Minkowski Spacetime Diagram
Extending the abilities of the Minkowski spacetime diagram Nilton Penha Departamento de Física, Universidade Federal de Minas Gerais, Brazil, [email protected]. Bernhard Rothenstein Politehnica University of Timisoara, Physics Department, Timisoara, Romania, [email protected]. Doru Paunescu Politehnica University of Timisoara, Department of Mathematics, Timisoara, Romania Abstract. A two-dimensional Minkowski spacetime diagram is neatly represented on a Euclidean ordinary plane. However the Euclidean lengths of the lines on the diagram do not correspond to the true values of physical quantities in spacetime, except for those referring to the stationary reference frame. In order to extend its abilities to other inertial reference frames, we derive a factor which, multiplied by the magnitude of the actually displayed values (on the diagram), leads to the corresponding true measured values by any other inertial observers. Doing so, the student can infer from the Euclidean diagram plot the expressions that account for Lorentz length contraction, time dilation and also Lorentz Transformations just by using regular trigonometry. 1. Introduction Minkowski space-time diagrams are very helpful for understanding special relativity theory because they make transparent the relation between events and the parameters used to describe them by different reference frames. An event is characterized by the space coordinates of the point where it happens and by its time coordinate t displayed by a clock located at the point considered. The set of all possible events is what is meant by spacetime. If Cartesian coordinates are used to specify the spatial localization of the event, the spacetime coordinates are (x,y,z,t) relative to a given reference frame.