Arxiv:1601.06530V2 [Math.DG] 27 Nov 2016 Moving Frame and Integrable
Total Page:16
File Type:pdf, Size:1020Kb

Load more
Recommended publications
-

LINEAR ALGEBRA METHODS in COMBINATORICS László Babai
LINEAR ALGEBRA METHODS IN COMBINATORICS L´aszl´oBabai and P´eterFrankl Version 2.1∗ March 2020 ||||| ∗ Slight update of Version 2, 1992. ||||||||||||||||||||||| 1 c L´aszl´oBabai and P´eterFrankl. 1988, 1992, 2020. Preface Due perhaps to a recognition of the wide applicability of their elementary concepts and techniques, both combinatorics and linear algebra have gained increased representation in college mathematics curricula in recent decades. The combinatorial nature of the determinant expansion (and the related difficulty in teaching it) may hint at the plausibility of some link between the two areas. A more profound connection, the use of determinants in combinatorial enumeration goes back at least to the work of Kirchhoff in the middle of the 19th century on counting spanning trees in an electrical network. It is much less known, however, that quite apart from the theory of determinants, the elements of the theory of linear spaces has found striking applications to the theory of families of finite sets. With a mere knowledge of the concept of linear independence, unexpected connections can be made between algebra and combinatorics, thus greatly enhancing the impact of each subject on the student's perception of beauty and sense of coherence in mathematics. If these adjectives seem inflated, the reader is kindly invited to open the first chapter of the book, read the first page to the point where the first result is stated (\No more than 32 clubs can be formed in Oddtown"), and try to prove it before reading on. (The effect would, of course, be magnified if the title of this volume did not give away where to look for clues.) What we have said so far may suggest that the best place to present this material is a mathematics enhancement program for motivated high school students. -

Notes on Euclidean Geometry Kiran Kedlaya Based
Notes on Euclidean Geometry Kiran Kedlaya based on notes for the Math Olympiad Program (MOP) Version 1.0, last revised August 3, 1999 c Kiran S. Kedlaya. This is an unfinished manuscript distributed for personal use only. In particular, any publication of all or part of this manuscript without prior consent of the author is strictly prohibited. Please send all comments and corrections to the author at [email protected]. Thank you! Contents 1 Tricks of the trade 1 1.1 Slicing and dicing . 1 1.2 Angle chasing . 2 1.3 Sign conventions . 3 1.4 Working backward . 6 2 Concurrence and Collinearity 8 2.1 Concurrent lines: Ceva’s theorem . 8 2.2 Collinear points: Menelaos’ theorem . 10 2.3 Concurrent perpendiculars . 12 2.4 Additional problems . 13 3 Transformations 14 3.1 Rigid motions . 14 3.2 Homothety . 16 3.3 Spiral similarity . 17 3.4 Affine transformations . 19 4 Circular reasoning 21 4.1 Power of a point . 21 4.2 Radical axis . 22 4.3 The Pascal-Brianchon theorems . 24 4.4 Simson line . 25 4.5 Circle of Apollonius . 26 4.6 Additional problems . 27 5 Triangle trivia 28 5.1 Centroid . 28 5.2 Incenter and excenters . 28 5.3 Circumcenter and orthocenter . 30 i 5.4 Gergonne and Nagel points . 32 5.5 Isogonal conjugates . 32 5.6 Brocard points . 33 5.7 Miscellaneous . 34 6 Quadrilaterals 36 6.1 General quadrilaterals . 36 6.2 Cyclic quadrilaterals . 36 6.3 Circumscribed quadrilaterals . 38 6.4 Complete quadrilaterals . 39 7 Inversive Geometry 40 7.1 Inversion . -

Moving Parseval Frames for Vector Bundles
Houston Journal of Mathematics c 2014 University of Houston Volume 40, No. 3, 2014 MOVING PARSEVAL FRAMES FOR VECTOR BUNDLES D. FREEMAN, D. POORE, A. R. WEI, AND M. WYSE Communicated by Vern I. Paulsen Abstract. Parseval frames can be thought of as redundant or linearly de- pendent coordinate systems for Hilbert spaces, and have important appli- cations in such areas as signal processing, data compression, and sampling theory. We extend the notion of a Parseval frame for a fixed Hilbert space to that of a moving Parseval frame for a vector bundle over a manifold. Many vector bundles do not have a moving basis, but in contrast to this every vector bundle over a paracompact manifold has a moving Parseval frame. We prove that a sequence of sections of a vector bundle is a moving Parseval frame if and only if the sections are the orthogonal projection of a moving orthonormal basis for a larger vector bundle. In the case that our vector bundle is the tangent bundle of a Riemannian manifold, we prove that a sequence of vector fields is a Parseval frame for the tangent bundle of a Riemannian manifold if and only if the vector fields are the orthogonal projection of a moving orthonormal basis for the tangent bundle of a larger Riemannian manifold. 1. Introduction Frames for Hilbert spaces are essentially redundant coordinate systems. That is, every vector can be represented as a series of scaled frame vectors, but the series is not unique. Though this redundancy is not necessary in a coordinate system, it can actually be very useful. -
Chapter 2: Minkowski Spacetime
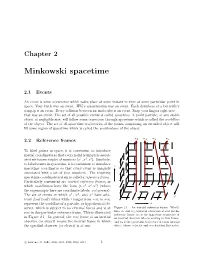
Chapter 2 Minkowski spacetime 2.1 Events An event is some occurrence which takes place at some instant in time at some particular point in space. Your birth was an event. JFK's assassination was an event. Each downbeat of a butterfly’s wingtip is an event. Every collision between air molecules is an event. Snap your fingers right now | that was an event. The set of all possible events is called spacetime. A point particle, or any stable object of negligible size, will follow some trajectory through spacetime which is called the worldline of the object. The set of all spacetime trajectories of the points comprising an extended object will fill some region of spacetime which is called the worldvolume of the object. 2.2 Reference frames w 1 w 2 w 3 w 4 To label points in space, it is convenient to introduce spatial coordinates so that every point is uniquely associ- ated with some triplet of numbers (x1; x2; x3). Similarly, to label events in spacetime, it is convenient to introduce spacetime coordinates so that every event is uniquely t associated with a set of four numbers. The resulting spacetime coordinate system is called a reference frame . Particularly convenient are inertial reference frames, in which coordinates have the form (t; x1; x2; x3) (where the superscripts here are coordinate labels, not powers). The set of events in which x1, x2, and x3 have arbi- x 1 trary fixed (real) values while t ranges from −∞ to +1 represent the worldline of a particle, or hypothetical ob- x 2 server, which is subject to no external forces and is at Figure 2.1: An inertial reference frame. -

Extension of Algorithmic Geometry to Fractal Structures Anton Mishkinis
Extension of algorithmic geometry to fractal structures Anton Mishkinis To cite this version: Anton Mishkinis. Extension of algorithmic geometry to fractal structures. General Mathematics [math.GM]. Université de Bourgogne, 2013. English. NNT : 2013DIJOS049. tel-00991384 HAL Id: tel-00991384 https://tel.archives-ouvertes.fr/tel-00991384 Submitted on 15 May 2014 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Thèse de Doctorat école doctorale sciences pour l’ingénieur et microtechniques UNIVERSITÉ DE BOURGOGNE Extension des méthodes de géométrie algorithmique aux structures fractales ■ ANTON MISHKINIS Thèse de Doctorat école doctorale sciences pour l’ingénieur et microtechniques UNIVERSITÉ DE BOURGOGNE THÈSE présentée par ANTON MISHKINIS pour obtenir le Grade de Docteur de l’Université de Bourgogne Spécialité : Informatique Extension des méthodes de géométrie algorithmique aux structures fractales Soutenue publiquement le 27 novembre 2013 devant le Jury composé de : MICHAEL BARNSLEY Rapporteur Professeur de l’Université nationale australienne MARC DANIEL Examinateur Professeur de l’école Polytech Marseille CHRISTIAN GENTIL Directeur de thèse HDR, Maître de conférences de l’Université de Bourgogne STEFANIE HAHMANN Examinateur Professeur de l’Université de Grenoble INP SANDRINE LANQUETIN Coencadrant Maître de conférences de l’Université de Bourgogne RONALD GOLDMAN Rapporteur Professeur de l’Université Rice ANDRÉ LIEUTIER Rapporteur “Technology scientific director” chez Dassault Systèmes Contents 1 Introduction 1 1.1 Context . -
The Light Cone and the Conformal Sphere: Differential Invariants And
Light cone and conformal sphere The Light Cone and the Conformal Sphere: Differential Invariants and their Relations Theresa C. Anderson April, 2010 Theresa C. Anderson The Light Cone and the Conformal Sphere: Differential Invariants and their Relations Light cone and conformal sphere Motivation: The recent concept of the group-based moving frame as an equivariant map, introduced by Fels and Olver, has been a useful aid in the quest for differential invariants. The moving frame is used to construct the Maurer-Cartan matrix K; which according to a theorem of Hubert, contains all generators for the differential invariants of a curve. Here we employ the normalization technique of Fels and Olver to construct group-based moving frames for the light cone and the conformal 2-sphere, and we use the moving frame to find the differential invariants. Theresa C. Anderson The Light Cone and the Conformal Sphere: Differential Invariants and their Relations Euclidean space admits a natural action from the Euclidean group, the group of rigid transformations (rotations and translations). Light cone and conformal sphere We first recall the following definition and theorem: A classical moving frame on a n-manifold is a set of n vectors along a curve which is invariant under an action by the group (such as a rigid motion in the Euclidean case). Theresa C. Anderson The Light Cone and the Conformal Sphere: Differential Invariants and their Relations Light cone and conformal sphere We first recall the following definition and theorem: A classical moving frame on a n-manifold is a set of n vectors along a curve which is invariant under an action by the group (such as a rigid motion in the Euclidean case). -

NATURAL STRUCTURES in DIFFERENTIAL GEOMETRY Lucas
NATURAL STRUCTURES IN DIFFERENTIAL GEOMETRY Lucas Mason-Brown A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in mathematics Trinity College Dublin March 2015 Declaration I declare that the thesis contained herein is entirely my own work, ex- cept where explicitly stated otherwise, and has not been submitted for a degree at this or any other university. I grant Trinity College Dublin per- mission to lend or copy this thesis upon request, with the understanding that this permission covers only single copies made for study purposes, subject to normal conditions of acknowledgement. Contents 1 Summary 3 2 Acknowledgment 6 I Natural Bundles and Operators 6 3 Jets 6 4 Natural Bundles 9 5 Natural Operators 11 6 Invariant-Theoretic Reduction 16 7 Classical Results 24 8 Natural Operators on Differential Forms 32 II Natural Operators on Alternating Multivector Fields 38 9 Twisted Algebras in VecZ 40 10 Ordered Multigraphs 48 11 Ordered Multigraphs and Natural Operators 52 12 Gerstenhaber Algebras 57 13 Pre-Gerstenhaber Algebras 58 irred 14 A Lie-admissable Structure on Graacyc 63 irred 15 A Co-algebra Structure on Graacyc 67 16 Loday's Rigidity Theorem 75 17 A Useful Consequence of K¨unneth'sTheorem 83 18 Chevalley-Eilenberg Cohomology 87 1 Summary Many of the most important constructions in differential geometry are functorial. Take, for example, the tangent bundle. The tangent bundle can be profitably viewed as a functor T : Manm ! Fib from the category of m-dimensional manifolds (with local diffeomorphisms) to 3 the category of fiber bundles (with locally invertible bundle maps). -

Lectures – Math 128 – Geometry – Spring 2002
Lectures { Math 128 { Geometry { Spring 2002 Day 1 ∼∼∼ ∼∼∼ Introduction 1. Introduce Self 2. Prerequisites { stated prereq is math 52, but might be difficult without math 40 Syllabus Go over syllabus Overview of class Recent flurry of mathematical work trying to discover shape of space • Challenge assumption space is flat, infinite • space picture with Einstein quote • will discuss possible shapes for 2D and 3D spaces • this is topology, but will learn there is intrinsic link between top and geometry • to discover poss shapes, need to talk about poss geometries • Geometry = set + group of transformations • We will discuss geometries, symmetry groups • Quotient or identification geometries give different manifolds / orbifolds • At end, we'll come back to discussing theories for shape of universe • How would you try to discover shape of space you're living in? 2 Dimensional Spaces { A Square 1. give face, 3D person can do surgery 2. red thread, possible shapes, veered? 3. blue thread, never crossed, possible shapes? 4. what about NE direction? 1 List of possibilities: classification (closed) 1. list them 2. coffee cup vs donut How to tell from inside { view inside small torus 1. old bi-plane game, now spaceship 2. view in each direction (from flat torus point of view) 3. tiling pictures 4. fundamental domain { quotient geometry 5. length spectra can tell spaces apart 6. finite area 7. which one is really you? 8. glueing, animation of folding torus 9. representation, with arrows 10. discuss transformations 11. torus tic-tac-toe, chess on Friday Different geometries (can shorten or lengthen this part) 1. describe each of 3 geometries 2. -

Moving Frames
Moving Frames Peter J. Olver University of Minnesota http://www.math.umn.edu/ ∼ olver Benasque, September 2009 History of Moving Frames Classical contributions: M. Bartels (∼1800), J. Serret, J. Fr´enet, G. Darboux, ´ E. Cotton, El´ ie Cartan Modern developments: (1970’s) S.S. Chern, M. Green, P. Griffiths, G. Jensen, T. Ivey, J. Landsberg, . The equivariant approach: (1997 – ) PJO, M. Fels, G. Mar´ı–Beffa, I. Kogan, J. Cheh, J. Pohjanpelto, P. Kim, M. Boutin, D. Lewis, E. Mansfield, E. Hubert, E. Shemyakova, O. Morozov, R. McLenaghan, R. Smirnov, J. Yue, A. Nikitin, J. Patera, P. Vassiliou, . Moving Frame — Space Curves t b tangent normal binormal dz d2z n t = n = b = t × n ds ds2 s — arc length Fr´enet–Serret equations dt dn db = κ n = − κ t + τ b = − τ n ds ds ds κ — curvature τ — torsion Moving Frame — Space Curves t b tangent normal binormal dz d2z n t = n = b = t × n ds ds2 s — arc length z Fr´enet–Serret equations dt dn db = κ n = − κ t + τ b = − τ n ds ds ds κ — curvature τ — torsion “I did not quite understand how he [Cartan] does this in general, though in the examples he gives the procedure is clear.” “Nevertheless, I must admit I found the book, like most of Cartan’s papers, hard reading.” — Hermann Weyl “Cartan on groups and differential geometry” Bull. Amer. Math. Soc. 44 (1938) 598–601 Applications of Moving Frames • Differential geometry • Equivalence • Symmetry • Differential invariants • Rigidity • Identities and syzygies • Joint invariants and semi-differential invariants • Invariant differential forms and tensors • Integral invariants • Classical invariant theory • Computer vision ◦ object recognition ◦ symmetry detection • Invariant variational problems • Invariant numerical methods • Mechanics, including DNA • Poisson geometry & solitons • Killing tensors in relativity • Invariants of Lie algebras in quantum mechanics • Control theory • Lie pseudo-groups The Basic Equivalence Problem M — smooth m-dimensional manifold. -
![Arxiv:1806.04129V2 [Math.GT] 23 Aug 2018 Dense, Although in Certain Cases It Is Locally the Product of a Cantor Set and an Interval](https://docslib.b-cdn.net/cover/6052/arxiv-1806-04129v2-math-gt-23-aug-2018-dense-although-in-certain-cases-it-is-locally-the-product-of-a-cantor-set-and-an-interval-1826052.webp)
Arxiv:1806.04129V2 [Math.GT] 23 Aug 2018 Dense, Although in Certain Cases It Is Locally the Product of a Cantor Set and an Interval
ANGELS' STAIRCASES, STURMIAN SEQUENCES, AND TRAJECTORIES ON HOMOTHETY SURFACES JOSHUA BOWMAN AND SLADE SANDERSON Abstract. A homothety surface can be assembled from polygons by identifying their edges in pairs via homotheties, which are compositions of translation and scaling. We consider linear trajectories on a 1-parameter family of genus-2 homothety surfaces. The closure of a trajectory on each of these surfaces always has Hausdorff dimension 1, and contains either a closed loop or a lamination with Cantor cross-section. Trajectories have cutting sequences that are either eventually periodic or eventually Sturmian. Although no two of these surfaces are affinely equivalent, their linear trajectories can be related directly to those on the square torus, and thence to each other, by means of explicit functions. We also briefly examine two related families of surfaces and show that the above behaviors can be mixed; for instance, the closure of a linear trajectory can contain both a closed loop and a lamination. A homothety of the plane is a similarity that preserves directions; in other words, it is a composition of translation and scaling. A homothety surface has an atlas (covering all but a finite set of points) whose transition maps are homotheties. Homothety surfaces are thus generalizations of translation surfaces, which have been actively studied for some time under a variety of guises (measured foliations, abelian differentials, unfolded polygonal billiard tables, etc.). Like a translation surface, a homothety surface is locally flat except at a finite set of singular points|although in general it does not have an accompanying Riemannian metric|and it has a well-defined global notion of direction, or slope, again except at the singular points. -

Cross Ratios on Boundaries of Symmetric Spaces and Euclidean Buildings
Transformation Groups c The Author(s) (2020) Vol. 26, No. 1, 2021, pp. 31–68 CROSS RATIOS ON BOUNDARIES OF SYMMETRIC SPACES AND EUCLIDEAN BUILDINGS J. BEYRER∗ Department of Mathematics Universit¨atHeidelberg Im Neuenheimer Feld 205, 69120 Heidelberg, Germany [email protected] Abstract. We generalize the natural cross ratio on the ideal boundary of a rank one symmetric space, or even CAT(−1) space, to higher rank symmetric spaces and (non- locally compact) Euclidean buildings. We obtain vector valued cross ratios defined on simplices of the building at infinity. We show several properties of those cross ratios; for example that (under some restrictions) periods of hyperbolic isometries give back the translation vector. In addition, we show that cross ratio preserving maps on the chamber set are induced by isometries and vice versa, | motivating that the cross ratios bring the geometry of the symmetric space/Euclidean building to the boundary. Introduction Cross ratios on boundaries are a crucial tool in hyperbolic geometry and more general negatively curved spaces. In this paper we show that we can generalize these cross ratios to (the non-positively curved) symmetric spaces of higher rank and thick Euclidean buildings with many of the properties of the cross ratio still valid. 2 2 On the boundary @1H of the hyperbolic plane H there is naturally a multi- plicative cross ratio defined by z1 − z2 z3 − z4 crH2 (z1; z2; z3; z4) = z1 − z4 z3 − z2 2 2 when considering H in the upper half space model, i.e., @1H = R [ f1g. This cross ratio plays an essential role in hyperbolic geometry. -

Moving Frames Astérisque, Tome S131 (1985), P
Astérisque SHIING-SHEN CHERN Moving frames Astérisque, tome S131 (1985), p. 67-77 <http://www.numdam.org/item?id=AST_1985__S131__67_0> © Société mathématique de France, 1985, tous droits réservés. L’accès aux archives de la collection « Astérisque » (http://smf4.emath.fr/ Publications/Asterisque/) implique l’accord avec les conditions générales d’uti- lisation (http://www.numdam.org/conditions). Toute utilisation commerciale ou impression systématique est constitutive d’une infraction pénale. Toute copie ou impression de ce fichier doit contenir la présente mention de copyright. Article numérisé dans le cadre du programme Numérisation de documents anciens mathématiques http://www.numdam.org/ Société Mathématique de France Astérisque, hors série, 1985, p. 67-77 MOVING FRAMES BY Shiing-shen CHERN1 Introduction The method of moving frames has a long history. It is at the heart of kinematics and its conscious application to differential geometry could be traced back at least to SERRET and FRENET2. In his famous "Leçons sur la théorie des surfaces," based on lectures at the Sorbonne 1882-1885, DAR- BOUX had the revolutionary idea using frames depending on two parameters and integrability conditions turn up. DARBOUX'S method was generalized to arbitrary Lie groups by Emile COTTON [14] for the search of differen tial invariants, whose work should be considered a forerunner of the general method of moving frames. CARTAN'S first paper on moving frames was published in 1910 [7]. He im mediately observed that DARBOUX'S partial derivatives should be combined into the "Maurer-Cartan forms" and DARBOUX'S integrability conditions are essentially the Maurer-Cartan equations. This extends the method to the case where the ambient space is acted on by any Lie group and, more generally, by an infinite pseudogroup in CARTAN'S sense, such as the pseu- dogroup of all complex analytic automorphisms in n variables.