1 Riemannian Metric 2 Affine Connections
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

2. Chern Connections and Chern Curvatures1
1 2. Chern connections and Chern curvatures1 Let V be a complex vector space with dimC V = n. A hermitian metric h on V is h : V £ V ¡¡! C such that h(av; bu) = abh(v; u) h(a1v1 + a2v2; u) = a1h(v1; u) + a2h(v2; u) h(v; u) = h(u; v) h(u; u) > 0; u 6= 0 where v; v1; v2; u 2 V and a; b; a1; a2 2 C. If we ¯x a basis feig of V , and set hij = h(ei; ej) then ¤ ¤ ¤ ¤ h = hijei ej 2 V V ¤ ¤ ¤ ¤ where ei 2 V is the dual of ei and ei 2 V is the conjugate dual of ei, i.e. X ¤ ei ( ajej) = ai It is obvious that (hij) is a hermitian positive matrix. De¯nition 0.1. A complex vector bundle E is said to be hermitian if there is a positive de¯nite hermitian tensor h on E. r Let ' : EjU ¡¡! U £ C be a trivilization and e = (e1; ¢ ¢ ¢ ; er) be the corresponding frame. The r hermitian metric h is represented by a positive hermitian matrix (hij) 2 ¡(; EndC ) such that hei(x); ej(x)i = hij(x); x 2 U Then hermitian metric on the chart (U; ') could be written as X ¤ ¤ h = hijei ej For example, there are two charts (U; ') and (V; Ã). We set g = à ± '¡1 :(U \ V ) £ Cr ¡¡! (U \ V ) £ Cr and g is represented by matrix (gij). On U \ V , we have X X X ¡1 ¡1 ¡1 ¡1 ¡1 ei(x) = ' (x; "i) = à ± à ± ' (x; "i) = à (x; gij"j) = gijà (x; "j) = gije~j(x) j j For the metric X ~ hij = hei(x); ej(x)i = hgike~k(x); gjle~l(x)i = gikhklgjl k;l that is h = g ¢ h~ ¢ g¤ 12008.04.30 If there are some errors, please contact to: [email protected] 2 Example 0.2 (Fubini-Study metric on holomorphic tangent bundle T 1;0Pn). -

A Geodesic Connection in Fréchet Geometry
A geodesic connection in Fr´echet Geometry Ali Suri Abstract. In this paper first we propose a formula to lift a connection on M to its higher order tangent bundles T rM, r 2 N. More precisely, for a given connection r on T rM, r 2 N [ f0g, we construct the connection rc on T r+1M. Setting rci = rci−1 c, we show that rc1 = lim rci exists − and it is a connection on the Fr´echet manifold T 1M = lim T iM and the − geodesics with respect to rc1 exist. In the next step, we will consider a Riemannian manifold (M; g) with its Levi-Civita connection r. Under suitable conditions this procedure i gives a sequence of Riemannian manifolds f(T M, gi)gi2N equipped with ci c1 a sequence of Riemannian connections fr gi2N. Then we show that r produces the curves which are the (local) length minimizer of T 1M. M.S.C. 2010: 58A05, 58B20. Key words: Complete lift; spray; geodesic; Fr´echet manifolds; Banach manifold; connection. 1 Introduction In the first section we remind the bijective correspondence between linear connections and homogeneous sprays. Then using the results of [6] for complete lift of sprays, we propose a formula to lift a connection on M to its higher order tangent bundles T rM, r 2 N. More precisely, for a given connection r on T rM, r 2 N [ f0g, we construct its associated spray S and then we lift it to a homogeneous spray Sc on T r+1M [6]. Then, using the bijective correspondence between connections and sprays, we derive the connection rc on T r+1M from Sc. -

Math 396. Covariant Derivative, Parallel Transport, and General Relativity
Math 396. Covariant derivative, parallel transport, and General Relativity 1. Motivation Let M be a smooth manifold with corners, and let (E, ∇) be a C∞ vector bundle with connection over M. Let γ : I → M be a smooth map from a nontrivial interval to M (a “path” in M); keep in mind that γ may not be injective and that its velocity may be zero at a rather arbitrary closed subset of I (so we cannot necessarily extend the standard coordinate on I near each t0 ∈ I to part of a local coordinate system on M near γ(t0)). In pseudo-Riemannian geometry E = TM and ∇ is a specific connection arising from the metric tensor (the Levi-Civita connection; see §4). A very fundamental concept is that of a (smooth) section along γ for a vector bundle on M. Before we give the official definition, we consider an example. Example 1.1. To each t0 ∈ I there is associated a velocity vector 0 ∗ γ (t0) = dγ(t0)(∂t|t0 ) ∈ Tγ(t0)(M) = (γ (TM))(t0). Hence, we get a set-theoretic section of the pullback bundle γ∗(TM) → I by assigning to each time 0 t0 the velocity vector γ (t0) at that time. This is not just a set-theoretic section, but a smooth section. Indeed, this problem is local, so pick t0 ∈ I and an open U ⊆ M containing γ(J) for an open ∞ neighborhood J ⊆ I around t0, with J and U so small that U admits a C coordinate system {x1, . , xn}. Let γi = xi ◦ γ|J ; these are smooth functions on J since γ is a smooth map from I into M. -

1 the Levi-Civita Connection and Its Curva- Ture
Department of Mathematics Geometry of Manifolds, 18.966 Spring 2005 Lecture Notes 1 The Levi-Civita Connection and its curva- ture In this lecture we introduce the most important connection. This is the Levi-Civita connection in the tangent bundle of a Riemannian manifold. 1.1 The Einstein summation convention and the Ricci Calculus When dealing with tensors on a manifold it is convient to use the following conventions. When we choose a local frame for the tangent bundle we write e1, . en for this basis. We always index bases of the tangent bundle with indices down. We write then a typical tangent vector n X i X = X ei. i=1 Einstein’s convention says that when we see indices both up and down we assume that we are summing over them so he would write i X = X ei while a one form would be written as i θ = aie where ei is the dual co-frame field. For example when we have coordinates x1, x2, . , xn then we get a basis for the tangent bundle ∂/∂x1, . , ∂/∂xn 1 More generally a typical tensor would be written as i l j k T = T jk ei ⊗ e ⊗ e ⊗ el Note that in general unless the tensor has some extra symmetries the order of the indices matters. The lower indices indicate that under a change of j frame fi = Ci ej a lower index changes the same way and is called covariant while an upper index changes by the inverse matrix. For example the dual i coframe field to the fi, called f is given by i i j f = D je i j i j i where D j is the inverse matrix to C i (so that D jC k = δk.) The compo- nents of the tensor T above in the fi basis are thus i l i0 l0 i j0 k0 l T jk = T j0k0 D i0 C jC kD l0 Notice that of course summing over a repeated upper and lower index results in a quantity that is independent of any choices. -

3. Introducing Riemannian Geometry
3. Introducing Riemannian Geometry We have yet to meet the star of the show. There is one object that we can place on a manifold whose importance dwarfs all others, at least when it comes to understanding gravity. This is the metric. The existence of a metric brings a whole host of new concepts to the table which, collectively, are called Riemannian geometry.Infact,strictlyspeakingwewillneeda slightly di↵erent kind of metric for our study of gravity, one which, like the Minkowski metric, has some strange minus signs. This is referred to as Lorentzian Geometry and a slightly better name for this section would be “Introducing Riemannian and Lorentzian Geometry”. However, for our immediate purposes the di↵erences are minor. The novelties of Lorentzian geometry will become more pronounced later in the course when we explore some of the physical consequences such as horizons. 3.1 The Metric In Section 1, we informally introduced the metric as a way to measure distances between points. It does, indeed, provide this service but it is not its initial purpose. Instead, the metric is an inner product on each vector space Tp(M). Definition:Ametric g is a (0, 2) tensor field that is: Symmetric: g(X, Y )=g(Y,X). • Non-Degenerate: If, for any p M, g(X, Y ) =0forallY T (M)thenX =0. • 2 p 2 p p With a choice of coordinates, we can write the metric as g = g (x) dxµ dx⌫ µ⌫ ⌦ The object g is often written as a line element ds2 and this expression is abbreviated as 2 µ ⌫ ds = gµ⌫(x) dx dx This is the form that we saw previously in (1.4). -

WHAT IS a CONNECTION, and WHAT IS IT GOOD FOR? Contents 1. Introduction 2 2. the Search for a Good Directional Derivative 3 3. F
WHAT IS A CONNECTION, AND WHAT IS IT GOOD FOR? TIMOTHY E. GOLDBERG Abstract. In the study of differentiable manifolds, there are several different objects that go by the name of \connection". I will describe some of these objects, and show how they are related to each other. The motivation for many notions of a connection is the search for a sufficiently nice directional derivative, and this will be my starting point as well. The story will by necessity include many supporting characters from differential geometry, all of whom will receive a brief but hopefully sufficient introduction. I apologize for my ungrammatical title. Contents 1. Introduction 2 2. The search for a good directional derivative 3 3. Fiber bundles and Ehresmann connections 7 4. A quick word about curvature 10 5. Principal bundles and principal bundle connections 11 6. Associated bundles 14 7. Vector bundles and Koszul connections 15 8. The tangent bundle 18 References 19 Date: 26 March 2008. 1 1. Introduction In the study of differentiable manifolds, there are several different objects that go by the name of \connection", and this has been confusing me for some time now. One solution to this dilemma was to promise myself that I would some day present a talk about connections in the Olivetti Club at Cornell University. That day has come, and this document contains my notes for this talk. In the interests of brevity, I do not include too many technical details, and instead refer the reader to some lovely references. My main references were [2], [4], and [5]. -

GEOMETRIC INTERPRETATIONS of CURVATURE Contents 1. Notation and Summation Conventions 1 2. Affine Connections 1 3. Parallel Tran
GEOMETRIC INTERPRETATIONS OF CURVATURE ZHENGQU WAN Abstract. This is an expository paper on geometric meaning of various kinds of curvature on a Riemann manifold. Contents 1. Notation and Summation Conventions 1 2. Affine Connections 1 3. Parallel Transport 3 4. Geodesics and the Exponential Map 4 5. Riemannian Curvature Tensor 5 6. Taylor Expansion of the Metric in Normal Coordinates and the Geometric Interpretation of Ricci and Scalar Curvature 9 Acknowledgments 13 References 13 1. Notation and Summation Conventions We assume knowledge of the basic theory of smooth manifolds, vector fields and tensors. We will assume all manifolds are smooth, i.e. C1, second countable and Hausdorff. All functions, curves and vector fields will also be smooth unless otherwise stated. Einstein summation convention will be adopted in this paper. In some cases, the index types on either side of an equation will not match and @ so a summation will be needed. The tangent vector field @xi induced by local i coordinates (x ) will be denoted as @i. 2. Affine Connections Riemann curvature is a measure of the noncommutativity of parallel transporta- tion of tangent vectors. To define parallel transport, we need the notion of affine connections. Definition 2.1. Let M be an n-dimensional manifold. An affine connection, or connection, is a map r : X(M) × X(M) ! X(M), where X(M) denotes the space of smooth vector fields, such that for vector fields V1;V2; V; W1;W2 2 X(M) and function f : M! R, (1) r(fV1 + V2;W ) = fr(V1;W ) + r(V2;W ), (2) r(V; aW1 + W2) = ar(V; W1) + r(V; W2), for all a 2 R. -

The Riemann Curvature Tensor
The Riemann Curvature Tensor Jennifer Cox May 6, 2019 Project Advisor: Dr. Jonathan Walters Abstract A tensor is a mathematical object that has applications in areas including physics, psychology, and artificial intelligence. The Riemann curvature tensor is a tool used to describe the curvature of n-dimensional spaces such as Riemannian manifolds in the field of differential geometry. The Riemann tensor plays an important role in the theories of general relativity and gravity as well as the curvature of spacetime. This paper will provide an overview of tensors and tensor operations. In particular, properties of the Riemann tensor will be examined. Calculations of the Riemann tensor for several two and three dimensional surfaces such as that of the sphere and torus will be demonstrated. The relationship between the Riemann tensor for the 2-sphere and 3-sphere will be studied, and it will be shown that these tensors satisfy the general equation of the Riemann tensor for an n-dimensional sphere. The connection between the Gaussian curvature and the Riemann curvature tensor will also be shown using Gauss's Theorem Egregium. Keywords: tensor, tensors, Riemann tensor, Riemann curvature tensor, curvature 1 Introduction Coordinate systems are the basis of analytic geometry and are necessary to solve geomet- ric problems using algebraic methods. The introduction of coordinate systems allowed for the blending of algebraic and geometric methods that eventually led to the development of calculus. Reliance on coordinate systems, however, can result in a loss of geometric insight and an unnecessary increase in the complexity of relevant expressions. Tensor calculus is an effective framework that will avoid the cons of relying on coordinate systems. -

Vector Bundles and Connections
VECTOR BUNDLES AND CONNECTIONS WERNER BALLMANN The exposition of vector bundles and connections below is taken from my lecture notes on differential geometry at the University of Bonn. I included more material than I usually cover in my lectures. On the other hand, I completely deleted the discussion of “concrete examples”, so that a pinch of salt has to be added by the customer. Standard references for vector bundles and connections are [GHV] and [KN], where the interested reader finds a rather comprehensive discussion of the subject. I would like to thank Andreas Balser for pointing out some misprints. The exposition is still in a preliminary state. Suggestions are very welcome. Contents 1. Vector Bundles 2 1.1. Sections 4 1.2. Frames 5 1.3. Constructions 7 1.4. Pull Back 9 1.5. The Fundamental Lemma on Morphisms 10 2. Connections 12 2.1. Local Data 13 2.2. Induced Connections 15 2.3. Pull Back 16 3. Curvature 18 3.1. Parallel Translation and Curvature 21 4. Miscellanea 26 4.1. Metrics 26 4.2. Cocycles and Bundles 27 References 28 Date: December 1999. Last corrections March 2002. 1 2 WERNERBALLMANN 1. Vector Bundles A bundle is a triple (π,E,M), where π : E → M is a map. In other words, a bundle is nothing else but a map. The term bundle is used −1 when the emphasis is on the preimages Ep := π (p) of the points p ∈ M; we call Ep the fiber of π over p and p the base point of Ep. -

Moving Parseval Frames for Vector Bundles
Houston Journal of Mathematics c 2014 University of Houston Volume 40, No. 3, 2014 MOVING PARSEVAL FRAMES FOR VECTOR BUNDLES D. FREEMAN, D. POORE, A. R. WEI, AND M. WYSE Communicated by Vern I. Paulsen Abstract. Parseval frames can be thought of as redundant or linearly de- pendent coordinate systems for Hilbert spaces, and have important appli- cations in such areas as signal processing, data compression, and sampling theory. We extend the notion of a Parseval frame for a fixed Hilbert space to that of a moving Parseval frame for a vector bundle over a manifold. Many vector bundles do not have a moving basis, but in contrast to this every vector bundle over a paracompact manifold has a moving Parseval frame. We prove that a sequence of sections of a vector bundle is a moving Parseval frame if and only if the sections are the orthogonal projection of a moving orthonormal basis for a larger vector bundle. In the case that our vector bundle is the tangent bundle of a Riemannian manifold, we prove that a sequence of vector fields is a Parseval frame for the tangent bundle of a Riemannian manifold if and only if the vector fields are the orthogonal projection of a moving orthonormal basis for the tangent bundle of a larger Riemannian manifold. 1. Introduction Frames for Hilbert spaces are essentially redundant coordinate systems. That is, every vector can be represented as a series of scaled frame vectors, but the series is not unique. Though this redundancy is not necessary in a coordinate system, it can actually be very useful. -
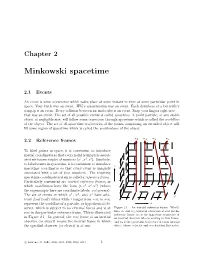
Chapter 2: Minkowski Spacetime
Chapter 2 Minkowski spacetime 2.1 Events An event is some occurrence which takes place at some instant in time at some particular point in space. Your birth was an event. JFK's assassination was an event. Each downbeat of a butterfly’s wingtip is an event. Every collision between air molecules is an event. Snap your fingers right now | that was an event. The set of all possible events is called spacetime. A point particle, or any stable object of negligible size, will follow some trajectory through spacetime which is called the worldline of the object. The set of all spacetime trajectories of the points comprising an extended object will fill some region of spacetime which is called the worldvolume of the object. 2.2 Reference frames w 1 w 2 w 3 w 4 To label points in space, it is convenient to introduce spatial coordinates so that every point is uniquely associ- ated with some triplet of numbers (x1; x2; x3). Similarly, to label events in spacetime, it is convenient to introduce spacetime coordinates so that every event is uniquely t associated with a set of four numbers. The resulting spacetime coordinate system is called a reference frame . Particularly convenient are inertial reference frames, in which coordinates have the form (t; x1; x2; x3) (where the superscripts here are coordinate labels, not powers). The set of events in which x1, x2, and x3 have arbi- x 1 trary fixed (real) values while t ranges from −∞ to +1 represent the worldline of a particle, or hypothetical ob- x 2 server, which is subject to no external forces and is at Figure 2.1: An inertial reference frame. -
The Light Cone and the Conformal Sphere: Differential Invariants And
Light cone and conformal sphere The Light Cone and the Conformal Sphere: Differential Invariants and their Relations Theresa C. Anderson April, 2010 Theresa C. Anderson The Light Cone and the Conformal Sphere: Differential Invariants and their Relations Light cone and conformal sphere Motivation: The recent concept of the group-based moving frame as an equivariant map, introduced by Fels and Olver, has been a useful aid in the quest for differential invariants. The moving frame is used to construct the Maurer-Cartan matrix K; which according to a theorem of Hubert, contains all generators for the differential invariants of a curve. Here we employ the normalization technique of Fels and Olver to construct group-based moving frames for the light cone and the conformal 2-sphere, and we use the moving frame to find the differential invariants. Theresa C. Anderson The Light Cone and the Conformal Sphere: Differential Invariants and their Relations Euclidean space admits a natural action from the Euclidean group, the group of rigid transformations (rotations and translations). Light cone and conformal sphere We first recall the following definition and theorem: A classical moving frame on a n-manifold is a set of n vectors along a curve which is invariant under an action by the group (such as a rigid motion in the Euclidean case). Theresa C. Anderson The Light Cone and the Conformal Sphere: Differential Invariants and their Relations Light cone and conformal sphere We first recall the following definition and theorem: A classical moving frame on a n-manifold is a set of n vectors along a curve which is invariant under an action by the group (such as a rigid motion in the Euclidean case).