Modern Developments in the Theory and Applications of Moving Frames
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Extended Rectifying Curves As New Kind of Modified Darboux Vectors
TWMS J. Pure Appl. Math., V.9, N.1, 2018, pp.18-31 EXTENDED RECTIFYING CURVES AS NEW KIND OF MODIFIED DARBOUX VECTORS Y. YAYLI1, I. GOK¨ 1, H.H. HACISALIHOGLU˘ 1 Abstract. Rectifying curves are defined as curves whose position vectors always lie in recti- fying plane. The centrode of a unit speed curve in E3 with nonzero constant curvature and non-constant torsion (or nonzero constant torsion and non-constant curvature) is a rectifying curve. In this paper, we give some relations between non-helical extended rectifying curves and their Darboux vector fields using any orthonormal frame along the curves. Furthermore, we give some special types of ruled surface. These surfaces are formed by choosing the base curve as one of the integral curves of Frenet vector fields and the director curve δ as the extended modified Darboux vector fields. Keywords: rectifying curve, centrodes, Darboux vector, conical geodesic curvature. AMS Subject Classification: 53A04, 53A05, 53C40, 53C42 1. Introduction From elementary differential geometry it is well known that at each point of a curve α, its planes spanned by fT;Ng, fT;Bg and fN; Bg are known as the osculating plane, the rectifying plane and the normal plane, respectively. A curve called twisted curve has non-zero curvature functions in the Euclidean 3-space. Rectifying curves are introduced by B. Y. Chen in [3] as space curves whose position vector always lies in its rectifying plane, spanned by the tangent and the binormal vector fields T and B of the curve. Accordingly, the position vector with respect to some chosen origin, of a rectifying curve α in E3, satisfies the equation α(s) = λ(s)T (s) + µ(s)B(s) for some functions λ(s) and µ(s): He proved that a twisted curve is congruent to a rectifying τ curve if and only if the ratio { is a non-constant linear function of arclength s: Subsequently Ilarslan and Nesovic generalized the rectifying curves in Euclidean 3-space to Euclidean 4-space [10]. -

Extension of the Darboux Frame Into Euclidean 4-Space and Its Invariants
Turkish Journal of Mathematics Turk J Math (2017) 41: 1628 { 1639 http://journals.tubitak.gov.tr/math/ ⃝c TUB¨ ITAK_ Research Article doi:10.3906/mat-1604-56 Extension of the Darboux frame into Euclidean 4-space and its invariants Mustafa DULD¨ UL¨ 1;∗, Bahar UYAR DULD¨ UL¨ 2, Nuri KURUOGLU˘ 3, Ertu˘grul OZDAMAR¨ 4 1Department of Mathematics, Faculty of Science and Arts, Yıldız Technical University, Istanbul,_ Turkey 2Department of Mathematics Education, Faculty of Education, Yıldız Technical University, Istanbul,_ Turkey 3Department of Civil Engineering, Faculty of Engineering and Architecture, Geli¸simUniversity, Istanbul,_ Turkey 4Department of Mathematics, Faculty of Science and Arts, Uluda˘gUniversity, Bursa, Turkey Received: 13.04.2016 • Accepted/Published Online: 14.02.2017 • Final Version: 23.11.2017 Abstract: In this paper, by considering a Frenet curve lying on an oriented hypersurface, we extend the Darboux frame field into Euclidean 4-space E4 . Depending on the linear independency of the curvature vector with the hypersurface's normal, we obtain two cases for this extension. For each case, we obtain some geometrical meanings of new invariants along the curve on the hypersurface. We also give the relationships between the Frenet frame curvatures and Darboux frame curvatures in E4 . Finally, we compute the expressions of the new invariants of a Frenet curve lying on an implicit hypersurface. Key words: Curves on hypersurface, Darboux frame field, curvatures 1. Introduction In differential geometry, frame fields constitute an important tool while studying curves and surfaces. The most familiar frame fields are the Frenet{Serret frame along a space curve, and the Darboux frame along a surface curve. -

A Hierarchy of Proof Rules for Checking Differential Invariance of Algebraic Sets Khalil Ghorbal∗ Andrew Sogokon∗ Andre´ Platzer∗ November 2014 CMU-CS-14-140
A Hierarchy of Proof Rules for Checking Differential Invariance of Algebraic Sets Khalil Ghorbal∗ Andrew Sogokon∗ Andre´ Platzer∗ November 2014 CMU-CS-14-140 Publisher: School of Computer Science Carnegie Mellon University Pittsburgh, PA, 15213 To appear [14] in the Proceedings of the 16th International Conference on Verification, Model Checking, and Abstract Interpretation (VMCAI 2015), 12-14 January 2015, Mumbai, India. This material is based upon work supported by the National Science Foundation (NSF) under NSF CA- REER Award CNS-1054246, NSF EXPEDITION CNS-0926181, NSF CNS-0931985, by DARPA under agreement number FA8750-12-2-029, as well as the Engineering and Physical Sciences Research Council (UK) under grant EP/I010335/1. The views and conclusions contained in this document are those of the authors and should not be inter- preted as representing the official policies, either expressed or implied, of any sponsoring institution or government. Keywords: algebraic invariant, deductive power, hierarchy, proof rules, differential equation, abstraction, continuous dynamics, formal verification, hybrid system Abstract This paper presents a theoretical and experimental comparison of sound proof rules for proving invariance of algebraic sets, that is, sets satisfying polynomial equalities, under the flow of poly- nomial ordinary differential equations. Problems of this nature arise in formal verification of con- tinuous and hybrid dynamical systems, where there is an increasing need for methods to expedite formal proofs. We study the trade-off between proof rule generality and practical performance and evaluate our theoretical observations on a set of heterogeneous benchmarks. The relationship between increased deductive power and running time performance of the proof rules is far from obvious; we discuss and illustrate certain classes of problems where this relationship is interesting. -

On the Patterns of Principal Curvature Lines Around a Curve of Umbilic Points
Anais da Academia Brasileira de Ciências (2005) 77(1): 13–24 (Annals of the Brazilian Academy of Sciences) ISSN 0001-3765 www.scielo.br/aabc On the Patterns of Principal Curvature Lines around a Curve of Umbilic Points RONALDO GARCIA1 and JORGE SOTOMAYOR2 1Instituto de Matemática e Estatística, Universidade Federal de Goiás Caixa Postal 131 – 74001-970 Goiânia, GO, Brasil 2Instituto de Matemática e Estatística, Universidade de São Paulo Rua do Matão 1010, Cidade Universitária, 05508-090 São Paulo, SP, Brasil Manuscript received on June 15, 2004; accepted for publication on October 10, 2004; contributed by Jorge Sotomayor* ABSTRACT In this paper is studied the behavior of principal curvature lines near a curve of umbilic points of a smooth surface. Key words: Umbilic point, principal curvature lines, principal cycles. 1 INTRODUCTION The study of umbilic points on surfaces and the patterns of principal curvature lines around them has attracted the attention of generation of mathematicians among whom can be named Monge, Darboux and Carathéodory. One aspect – concerning isolated umbilics – of the contributions of these authors, departing from Darboux (Darboux 1896), has been elaborated and extended in several directions by Garcia, Sotomayor and Gutierrez, among others. See (Gutierrez and Sotomayor, 1982, 1991, 1998), (Garcia and Sotomayor, 1997, 2000) and (Garcia et al. 2000, 2004) where additional references can be found. In (Carathéodory 1935) Carathéodory mentioned the interest of non isolated umbilics in generic surfaces pertinent to Geometric Optics. In a remarkably concise study he established that any local analytic regular arc of curve in R3 is a curve of umbilic points of a piece of analytic surface. -

Moving Parseval Frames for Vector Bundles
Houston Journal of Mathematics c 2014 University of Houston Volume 40, No. 3, 2014 MOVING PARSEVAL FRAMES FOR VECTOR BUNDLES D. FREEMAN, D. POORE, A. R. WEI, AND M. WYSE Communicated by Vern I. Paulsen Abstract. Parseval frames can be thought of as redundant or linearly de- pendent coordinate systems for Hilbert spaces, and have important appli- cations in such areas as signal processing, data compression, and sampling theory. We extend the notion of a Parseval frame for a fixed Hilbert space to that of a moving Parseval frame for a vector bundle over a manifold. Many vector bundles do not have a moving basis, but in contrast to this every vector bundle over a paracompact manifold has a moving Parseval frame. We prove that a sequence of sections of a vector bundle is a moving Parseval frame if and only if the sections are the orthogonal projection of a moving orthonormal basis for a larger vector bundle. In the case that our vector bundle is the tangent bundle of a Riemannian manifold, we prove that a sequence of vector fields is a Parseval frame for the tangent bundle of a Riemannian manifold if and only if the vector fields are the orthogonal projection of a moving orthonormal basis for the tangent bundle of a larger Riemannian manifold. 1. Introduction Frames for Hilbert spaces are essentially redundant coordinate systems. That is, every vector can be represented as a series of scaled frame vectors, but the series is not unique. Though this redundancy is not necessary in a coordinate system, it can actually be very useful. -

On Jacobi Fields and Canonical Connection in Sub-Riemannian
On Jacobi fields and a canonical connection in sub-Riemannian geometry Davide Barilari♭ and Luca Rizzi♯ Abstract. In sub-Riemannian geometry the coefficients of the Jacobi equa- tion define curvature-like invariants. We show that these coefficients can be interpreted as the curvature of a canonical Ehresmann connection associated to the metric, first introduced in [15]. We show why this connection is naturally nonlinear, and we discuss some of its properties. Contents 1. Introduction 1 2. Jacobi equation revisited 3 3. The Riemannian case 4 4. The sub-Riemannian case 4 5. Ehresmanncurvatureandcurvatureoperator 9 Appendix A. Normal condition for the canonical frame 12 1. Introduction A key tool for comparison theorems in Riemannian geometry is the Jacobi equation, i.e. the differential equation satisfied by Jacobi fields. Assume γε is a one-parameter family of geodesics on a Riemannian manifold (M,g) satisfying k k i j (1)γ ¨ε +Γij (γε)γ ˙ εγ˙ε =0. ∂ The corresponding Jacobi field J = ∂ε ε=0 γε is a vector field defined along γ = γ0, and satisfies the equation ∂Γk (2) J¨k + 2Γk J˙iγ˙ j + ij J ℓγ˙ iγ˙ j =0. ij ∂xℓ The Riemannian curvature is hidden in the coefficients of this equation. To make arXiv:1506.01827v3 [math.DG] 28 Mar 2017 it appear explicitly, however, one has to write (2) in terms of a parallel transported n frame X1(t),...,Xn(t) along γ(t). Letting J(t) = i=1 Ji(t)Xi(t) one gets the following normal form: P (3) J¨i + Rij (t)Jj =0. -
Chapter 2: Minkowski Spacetime
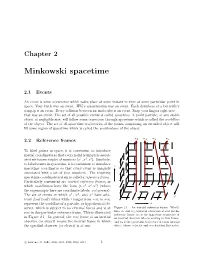
Chapter 2 Minkowski spacetime 2.1 Events An event is some occurrence which takes place at some instant in time at some particular point in space. Your birth was an event. JFK's assassination was an event. Each downbeat of a butterfly’s wingtip is an event. Every collision between air molecules is an event. Snap your fingers right now | that was an event. The set of all possible events is called spacetime. A point particle, or any stable object of negligible size, will follow some trajectory through spacetime which is called the worldline of the object. The set of all spacetime trajectories of the points comprising an extended object will fill some region of spacetime which is called the worldvolume of the object. 2.2 Reference frames w 1 w 2 w 3 w 4 To label points in space, it is convenient to introduce spatial coordinates so that every point is uniquely associ- ated with some triplet of numbers (x1; x2; x3). Similarly, to label events in spacetime, it is convenient to introduce spacetime coordinates so that every event is uniquely t associated with a set of four numbers. The resulting spacetime coordinate system is called a reference frame . Particularly convenient are inertial reference frames, in which coordinates have the form (t; x1; x2; x3) (where the superscripts here are coordinate labels, not powers). The set of events in which x1, x2, and x3 have arbi- x 1 trary fixed (real) values while t ranges from −∞ to +1 represent the worldline of a particle, or hypothetical ob- x 2 server, which is subject to no external forces and is at Figure 2.1: An inertial reference frame. -
The Light Cone and the Conformal Sphere: Differential Invariants And
Light cone and conformal sphere The Light Cone and the Conformal Sphere: Differential Invariants and their Relations Theresa C. Anderson April, 2010 Theresa C. Anderson The Light Cone and the Conformal Sphere: Differential Invariants and their Relations Light cone and conformal sphere Motivation: The recent concept of the group-based moving frame as an equivariant map, introduced by Fels and Olver, has been a useful aid in the quest for differential invariants. The moving frame is used to construct the Maurer-Cartan matrix K; which according to a theorem of Hubert, contains all generators for the differential invariants of a curve. Here we employ the normalization technique of Fels and Olver to construct group-based moving frames for the light cone and the conformal 2-sphere, and we use the moving frame to find the differential invariants. Theresa C. Anderson The Light Cone and the Conformal Sphere: Differential Invariants and their Relations Euclidean space admits a natural action from the Euclidean group, the group of rigid transformations (rotations and translations). Light cone and conformal sphere We first recall the following definition and theorem: A classical moving frame on a n-manifold is a set of n vectors along a curve which is invariant under an action by the group (such as a rigid motion in the Euclidean case). Theresa C. Anderson The Light Cone and the Conformal Sphere: Differential Invariants and their Relations Light cone and conformal sphere We first recall the following definition and theorem: A classical moving frame on a n-manifold is a set of n vectors along a curve which is invariant under an action by the group (such as a rigid motion in the Euclidean case). -

Symmetry Transformation Groups and Differential Invariants — Eivind Schneider
FACULTY OF SCIENCE AND TECHNOLOGY Department of Mathematics and Statistics Symmetry transformation groups and differential invariants — Eivind Schneider MAT-3900 Master’s Thesis in Mathematics November 2014 Abstract There exists a local classification of finite-dimensional Lie algebras of vector fields on C2. We lift the Lie algebras from this classification to the bundle C2 × C and compute differential invariants of these lifts. Acknowledgements I am very grateful to Boris Kruglikov for coming up with an interesting assignment and for guiding me through the work on it. I also extend my sincere gratitude to Valentin Lychagin for his help through many insightful lectures and conversations. A heartfelt thanks to you both, for sharing your knowledge and for the inspiration you give me. I would like to thank Henrik Winther for many helpful discussions. Finally, I thank my family, and especially my wife, Susann, for their support and encouragement. ii Contents 1 Introduction 1 2 Preliminaries 3 2.1 Jet spaces and prolongation of vector fields . 3 2.2 Classification of Lie algebras of vector fields in one and two dimensions . 5 2.3 Lifts . 7 2.3.1 Cohomology . 8 2.3.2 Coordinate change . 9 2.4 Differential invariants . 9 2.4.1 Determining the number of differential invariants of order k ........................... 10 2.4.2 Invariant derivations . 11 2.4.3 Tresse derivatives . 12 2.4.4 The Lie-Tresse theorem . 13 3 Warm-up: Differential invariants of lifts of Lie algebras in D(C) 15 3.1 g1 = h@xi .............................. 15 3.2 g2 = h@x; x@xi .......................... -

The Invariant Variational Bicomplex
Contemporary Mathematics The Invariant Variational Bicomplex Irina A. Kogan and Peter J. Olver Abstract. We establish a group-invariant version of the variational bicom- plex that is based on a general moving frame construction. The main appli- cation is an explicit group-invariant formula for the Euler-Lagrange equations of an invariant variational problem. 1. Introduction. Most modern physical theories begin by postulating a symmetry group and then formulating ¯eld equations based on a group-invariant variational principle. As ¯rst recognized by Sophus Lie, [17], every invariant variational problem can be written in terms of the di®erential invariants of the symmetry group. The associated Euler-Lagrange equations inherit the symmetry group of the variational problem, and so can also be written in terms of the di®erential invariants. Surprisingly, to date no-one has found a general group-invariant formula that enables one to directly construct the Euler-Lagrange equations from the invariant form of the variational problem. Only a few speci¯c examples, including plane curves and space curves and surfaces in Euclidean geometry, are worked out in Gri±ths, [12], and in Anderson's notes, [3], on the variational bicomplex. In this note, we summarize our recent solution to this problem; full details can be found in [16]. Our principal result is that, in all cases, the Euler-Lagrange equations have the invariant form (1) A¤E(L) ¡ B¤H(L) = 0; where E(L) is an invariantized version of the usual Euler-Lagrange expression or e e \Eulerian", while H(L) is an invariantized Hamiltonian, which in the multivariate context is,ein fact, a tensor, [20], and A¤; B¤ certain invariant di®erential operators, which we name the Euleriane and Hamiltonian operators. -

A New Method for Finding the Shape Operator of a Hypersurface in Euclidean 4-Space
Filomat 32:17 (2018), 5827–5836 Published by Faculty of Sciences and Mathematics, https://doi.org/10.2298/FIL1817827U University of Nis,ˇ Serbia Available at: http://www.pmf.ni.ac.rs/filomat A New Method for Finding the Shape Operator of a Hypersurface in Euclidean 4-Space Bahar Uyar D ¨uld¨ula aYıldız Technical University, Education Faculty, Department of Mathematics and Science Education, Istanbul,˙ Turkey Abstract. In this paper, by taking a Frenet curve lying on a parametric or implicit hypersurface and using the extended Darboux frame field of this curve, we give a new method for calculating the shape operator’s matrix of the hypersurface depending on the extended Darboux frame curvatures. This new method enables us to obtain the Gaussian and mean curvatures of the hypersurface depending on the geodesic torsions of the curve and the normal curvatures of the hypersurface. 1. Introduction In differential geometry, the shape of a geometric object (curve, surface, etc.) has always been a point of interest. In Euclidean space, along a space curve we have only one direction to move. This direction is determined by the tangent vector of the curve. The curvature of the curve measures the rate of change of its tangent vector, and together with the torsion of the curve they give us some information to its shape. However, along a surface we have different directions to move. These directions constitute a plane at a point, called the tangent plane of the surface at that point. When we move along a given direction, the tangent plane and thereby the normal vector of this plane, that is, the unit normal vector of the surface will change its direction except for some special cases. -

Differential Invariant Algebras
Differential Invariant Algebras Peter J. Olver† School of Mathematics University of Minnesota Minneapolis, MN 55455 [email protected] http://www.math.umn.edu/∼olver Abstract. The equivariant method of moving frames provides a systematic, algorith- mic procedure for determining and analyzing the structure of algebras of differential in- variants for both finite-dimensional Lie groups and infinite-dimensional Lie pseudo-groups. This paper surveys recent developments, including a few surprises and several open ques- tions. 1. Introduction. Differential invariants are the fundamental building blocks for constructing invariant differential equations and invariant variational problems, as well as determining their ex- plicit solutions and conservation laws. The equivalence, symmetry and rigidity properties of submanifolds are all governed by their differential invariants. Additional applications abound in differential geometry and relativity, classical invariant theory, computer vision, integrable systems, geometric flows, calculus of variations, geometric numerical integration, and a host of other fields of both pure and applied mathematics. † Supported in part by NSF Grant DMS 11–08894. November 16, 2018 1 Therefore, the underlying structure of the algebras‡ of differential invariants for a broad range of transformation groups becomes a topic of great importance. Until recently, though, beyond the relatively easy case of curves, i.e., functions of a single independent variable, and a few explicit calculations for individual higher dimensional examples,