MAX796/MAX797/MAX799 Step-Down Controllers With
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Application Note AN-1024 Flyback Transformer Design for The
Application Note AN-1024 Flyback Transformer Design for the IRIS40xx Series Table of Contents Page 1. Introduction to Flyback Transformer Design ...............................................1 2. Power Supply Design Criteria Required .......................................................2 3. Transformer Design Process.........................................................................2 4) Transformer Construction .............................................................................9 4.1) Transformer Materials..................................................................................10 4.2) Winding Styles.............................................................................................12 4.3) Winding Order..............................................................................................12 4.4) Multiple Outputs...........................................................................................12 4.5) Leakage Inductance ....................................................................................13 5) Transformer Core Types ..............................................................................14 6) Wire Table .....................................................................................................16 7) References ....................................................................................................17 8) Transformer Component Sources...............................................................17 One of the most important factors in the design of -

Magnetics in Switched-Mode Power Supplies Agenda
Magnetics in Switched-Mode Power Supplies Agenda • Block Diagram of a Typical AC-DC Power Supply • Key Magnetic Elements in a Power Supply • Review of Magnetic Concepts • Magnetic Materials • Inductors and Transformers 2 Block Diagram of an AC-DC Power Supply Input AC Rectifier PFC Input Filter Power Trans- Output DC Outputs Stage former Circuits (to loads) 3 Functional Block Diagram Input Filter Rectifier PFC L + Bus G PFC Control + Bus N Return Power StageXfmr Output Circuits + 12 V, 3 A - + Bus + 5 V, 10 A - PWM Control + 3.3 V, 5 A + Bus Return - Mag Amp Reset 4 Transformer Xfmr CR2 L3a + C5 12 V, 3 A CR3 - CR4 L3b + Bus + C6 5 V, 10 A CR5 Q2 - + Bus Return • In forward converters, as in most topologies, the transformer simply transmits energy from primary to secondary, with no intent of energy storage. • Core area must support the flux, and window area must accommodate the current. => Area product. 4 3 ⎛ PO ⎞ 4 AP = Aw Ae = ⎜ ⎟ cm ⎝ K ⋅ΔB ⋅ f ⎠ 5 Output Circuits • Popular configuration for these CR2 L3a voltages---two secondaries, with + From 12 V 12 V, 3 A a lower voltage output derived secondary CR3 C5 - from the 5 V output using a mag CR4 L3b + amp postregulator. From 5 V 5 V, 10 A secondary CR5 C6 - CR6 L4 SR1 + 3.3 V, 5 A CR8 CR7 C7 - Mag Amp Reset • Feedback to primary PWM is usually from the 5 V output, leaving the +12 V output quasi-regulated. 6 Transformer (cont’d) • Note the polarity dots. Xfmr CR2 L3a – Outputs conduct while Q2 is on. -

Achieving Higher Efficiency Using Planar Flyback Transformers for High Voltage AC/DC Converters WHITE PAPER
Achieving Higher Efficiency Using Planar Flyback Transformers for High Voltage AC/DC Converters WHITE PAPER INTRODUCTION The emphasis on improving industrial power supply efficiencies is both environmentally and economically motivated. Even incremental improvements in efficiency can result in electrical usage savings that contributes to cost reductions and the ability to minimize heat, and thus wasted energy in the application. Adding to the challenge of making power supplies more efficient is the fact that today’s designs are becoming more integrated, packing an increasing amount of functionality into smaller and smaller form factors. These complex, higher density applications create a much larger power envelope that is more difficult to manage effectively. AC/DC power supplies of less than 100 W typically use flyback topologies to convert electrical power efficiently as they are the simplest and lowest cost of all isolated topologies. Planar magnetics are commonly the high-frequency application converter of choice for designs because they offer a low number of turns in helical windings and very low resistance. Using a planar transformer in a high voltage application provides several advantages including a reduced or lower mechanical profile. However, there are technical challenges to overcome with this approach that include considerations for high inductance values and the level of isolation needed for safety reasons. This paper describes a planar flyback transformer designed by Bourns to meet the efficient conversion needed in high voltage applications. This customized planar transformer was tested on an AC/DC adaptor with an output of 5 V and delivered a peak efficiency of 91.05 % in this test. -
Flyback Photovoltaic Micro-Inverter with a Low Cost and Simple Digital-Analog Control Scheme
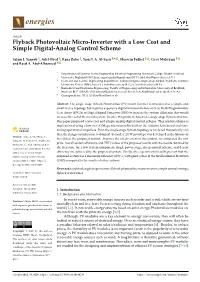
energies Article Flyback Photovoltaic Micro-Inverter with a Low Cost and Simple Digital-Analog Control Scheme Salam J. Yaqoob 1, Adel Obed 1, Rana Zubo 2, Yasir I. A. Al-Yasir 3,* , Hussein Fadhel 2 , Geev Mokryani 3 and Raed A. Abd-Alhameed 3 1 Department of Electrical Power Engineering, Electrical Engineering Technical College, Middle Technical University, Baghdad 10001, Iraq; [email protected] (S.J.Y.); [email protected] (A.O.) 2 Electronic and Control Engineering Department, Technical Engineering College Kirkuk, Northern Technical University, Kirkuk 00964, Iraq; [email protected] (R.Z.); [email protected] (H.F.) 3 Biomedical and Electronics Engineering, Faculty of Engineering and Informatics, University of Bradford, Bradford BD7 1DP, UK; [email protected] (G.M.); [email protected] (R.A.A.-A.) * Correspondence: [email protected] Abstract: The single-stage flyback Photovoltaic (PV) micro-inverter is considered as a simple and small in size topology but requires expensive digital microcontrollers such as Field-Programmable Gate Array (FPGA) or Digital Signal Processor (DSP) to increase the system efficiency, this would increase the cost of the overall system. To solve this problem, based on a single-stage flyback structure, this paper proposed a low cost and simple analog-digital control scheme. This control scheme is implemented using a low cost ATMega microcontroller built in the Arduino Uno board and some analog operational amplifiers. First, the single-stage flyback topology is analyzed theoretically and then the design consideration is obtained. -

Open Chengluo-Dissertation.Pdf
The Pennsylvania State University The Graduate School College of Engineering ACTIVE ENERGY HARVESTING FOR PIEZOELECTRIC DYNAMIC SYSTEMS A Dissertation in Electrical Engineering by Cheng Luo c 2010 Cheng Luo Submitted in Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy May 2010 The dissertation of Cheng Luo was reviewed and approved∗ by the following: Heath F. Hofmann Associate Professor of Electrical Engineering Dissertation Advisor, Chair of Committee Jeffrey S. Mayer Associate Professor of Electrical Engineering Qiming Zhang Professor of Electrical Engineering John D. Mitchell Professor of Electrical Engineering George A. Lesieutre Professor of Aerospace Engineering Kenneth Jenkins Professor of Electrical Engineering Head of Electrical Engineering ∗Signatures are on file in the Graduate School. Abstract Interest in the use of piezoelectric materials for electrical energy generation has in- creased over the years. The interface circuit between the piezoelectric device and electrical load plays an important role in the energy harvesting process. Most of the previous techniques are mainly passive, based on AC-DC diode-bridge rectifier cir- cuits. However, since the diode-bridge rectifier circuit can only emulate a resistive load, while the internal impedance of a piezoelectric device is essentially capacitive, the impedance matching condition can not be satisfied, and so generally the power harvesting ability of the passive technique is very low. The semi-active techniques represented by the synchronized switch harvesting on inductor(SSHI) technique improves performance over the passive techniques by inverting the piezoelectric voltage in phase with the device velocity, but its performance drops dramatically at off-resonance frequencies because it does not guarantee impedance matching at off-resonance frequencies. -

A Hybrid Flyback Led Driver with Utility Grid and Solar Pv
A HYBRID FLYBACK LED DRIVER WITH UTILITY GRID AND SOLAR PV INTERFACE A Thesis Presented to The Graduate Faculty of The University of Akron In Partial Fulfillment of the Requirements for the Degree Master of Science Awab Ali December, 2017 A HYBRID FLYBACK LED DRIVER WITH UTILITY GRID AND SOLAR PV INTERFACE Awab Ali Thesis Approved: Accepted: _____________________________ _____________________________ Advisor Interim Department Chair Dr. Yilmaz Sozer Dr. Joan Carletta _____________________________ _____________________________ Co-Advisor Dean of the College Dr. Jose A. De Abreu-Garcia Dr. Donald P. Visco Jr. _____________________________ _____________________________ Committee Member Dean of the Graduate School Dr. Malik E. Elbuluk Dr. Chand Midha _____________________________ Date ii ABSTRACT In renewable energy systems, maximum utilization of the available power is a desirable objective. In this thesis, a hybrid flyback converter with a Photovoltaic Panel (PV) port, an AC grid port and a DC Load port is proposed. The converter has the capability to achieve two major objectives: to maintain sustainable operation for a load such as Light Emitting Diodes (LED) lighting system, and to achieve maximum utilization of the solar PV panel output. Conventionally, PV panel power is injected into the grid using a converter, and then imported back to support the LED lighting system using another separate converter. A single converter capable of handling bi-directional power flow could be used to reduce the power processing compared to a system that uses multiple power converters. The LED lighting system can have its power supplied primarily by the solar PV. The balance of the power can be processed through the utility interactive port in both directions. -

Study on Magnetic Materials Used in Power Transformer and Inductor
View metadata, citation and similar papers at core.ac.uk brought to you by CORE 2006 2nd International Conference on Power Electronics Systems and Applicationsprovided by PolyU Institutional Repository Study on Magnetic Materials Used in Power Transformer and Inductor H. L. Chan, K. W. E. Cheng, T. K. Cheung and C. K. Cheung Digipower Technology Limited, Hong Kong Department of Electrical Engineering, The Hong Kong Polytechnic University ABSTRACT: Power electronics system is generally saturate itself, and leads to a larger magnetizing current. comprised of electrical and magnetic circuits. Nowadays, Short-circuit occurred in the winding as a result of there were a lot of research works on circuit topologies diminishing inductance and thermal runaway. ranging from single switch converter to soft-switching topologies, but the most difficult problems encountered 500 by many design engineers were magnetic issues, such as construction of transformer or inductor, application of Material R 400 air-gap, under- or over-estimated power rating of the Material P magnetic components, selection of magnetic core and so Material F on. [mT] Bsat 300 Material J The overall performance of any power converters Material W depend on not only the circuit design, but also the Material H application of magnetic components, this paper will 200 20 40 60 80 100 120 address some common problems related to the Temperature [degree C] applications of magnetic components, and some critical Figure 1: Flux Density vs. Temperature factors involved into development of such components for power converters. Power losses in transformers or inductors come A brief summary of some major magnetic materials, from core losses and copper losses. -
Application Note AN-17
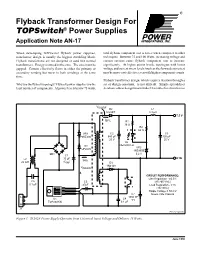
® Flyback Transformer Design For TOPSwitch® Power Supplies Application Note AN-17 When developing TOPSwitch flyback power supplies, total flyback component cost is lower when compared to other transformer design is usually the biggest stumbling block. techniques. Between 75 and 100 Watts, increasing voltage and Flyback transformers are not designed or used like normal current stresses cause flyback component cost to increase transformers. Energy is stored in the core. The core must be significantly. At higher power levels, topologies with lower gapped. Current effectively flows in either the primary or voltage and current stress levels (such as the forward converter) secondary winding but never in both windings at the same may be more cost effective even with higher component counts. time. Flyback transformer design, which requires iteration through a Why use the flyback topology? Flyback power supplies use the set of design equations, is not difficult. Simple spreadsheet least number of components. At power levels below 75 watts, iteration reduces design time to under 10 minutes for a transformer V DIODE D2 L1 UG8BT 3.3 µH 7.5 V I SEC R1 39 Ω R2 68 Ω VR1 C2 C3 P6KE200 680 µF 120 µF 25 V 25 V U2 D1 NEC2501-H VR2 UF4005 1N5995B 6.2 V BR1 C1 L2 33 µF RTN IPRI 22 mH (CIN) D3 1N4148 VDRAIN CIRCUIT PERFORMANCE: Line Regulation - ±0.5% C6 C5 (85-265 VAC) 0.1 µF 47µF Load Regulation - ±1% DRAIN (10-100%) SOURCE Ripple Voltage ± 50 mV CONTROL C7 Meets VDE Class B L 1000 nF U1 C4 Y1 TOP202YAI 0.1 µF N J1 PI-1787-021296 Figure 1. -

ON Semiconductor Is an Equal Opportunity/Affirmative Action Employer
ON Semiconductor Is Now To learn more about onsemi™, please visit our website at www.onsemi.com onsemi and and other names, marks, and brands are registered and/or common law trademarks of Semiconductor Components Industries, LLC dba “onsemi” or its affiliates and/or subsidiaries in the United States and/or other countries. onsemi owns the rights to a number of patents, trademarks, copyrights, trade secrets, and other intellectual property. A listing of onsemi product/patent coverage may be accessed at www.onsemi.com/site/pdf/Patent-Marking.pdf. onsemi reserves the right to make changes at any time to any products or information herein, without notice. The information herein is provided “as-is” and onsemi makes no warranty, representation or guarantee regarding the accuracy of the information, product features, availability, functionality, or suitability of its products for any particular purpose, nor does onsemi assume any liability arising out of the application or use of any product or circuit, and specifically disclaims any and all liability, including without limitation special, consequential or incidental damages. Buyer is responsible for its products and applications using onsemi products, including compliance with all laws, regulations and safety requirements or standards, regardless of any support or applications information provided by onsemi. “Typical” parameters which may be provided in onsemi data sheets and/ or specifications can and do vary in different applications and actual performance may vary over time. All operating parameters, including “Typicals” must be validated for each customer application by customer’s technical experts. onsemi does not convey any license under any of its intellectual property rights nor the rights of others. -

Maxrefdes1022
5V/2A, Synchronous No-Opto Isolated Flyback DC-DC Converter Using MAX17690 and MAX17606 MAXREFDES1022 Introduction Hardware Specification Due to its simplicity and low cost, the flyback converter is An isolated no-opto flyback DC-DC converter using the the preferred choice for low-to-medium isolated DC-DC MAX17690 and MAX17606 is demonstrated for a 5V DC power-conversion applications. However, the use of output application. The power supply delivers up to 2A at an optocoupler or an auxiliary winding on the flyback 5V. Table 1 shows an overview of the design specification. transformer for voltage feedback across the isolation barrier increases the number of components and design Table 1. Design Specification complexity. The MAX17690 eliminates the need for an optocoupler or auxiliary transformer winding and achieves PARAMETER SYMBOL MIN MAX ±5% output voltage regulation over line, load, and tem- Input Voltage VIN 10V 50V perature variations. Frequency fSW 128kHz The MAX17690 implements an innovative algorithm to Efficiency at Full Load ηMAX 85% accurately determine the output voltage by sensing the Efficiency at Minimum η 55% reflected voltage across the primary winding during the Load MIN flyback time interval. By sampling and regulating this Output Voltage V 4.9V 5.1V reflected voltage when the secondary current is close to O zero, the effects of secondary-side DC losses in the trans- Output Voltage Ripple ∆VO(SS) 100mV former winding, the PCB tracks, and the rectifying diode Output Current IO 0.2A 2.0A on output voltage regulation can be minimized. Maximum Output Power PO 10W The MAX17690 also compensates for the negative tem- perature coefficient of the rectifying diode. -

Design Space of Flyback Transformers
Design Space of Flyback Transformers George Slama Senior Application and Content Engineer [email protected] Würth Elektronik What is the design space? . Background – flyback transformers . Energy storage concept . Minimum energy curve – inductance - discontinuous . Maximum energy curve – inductance - continuous mode . Duty cycle limits . Reflected voltage limits . Mixed mode operation . Tolerances Date 16.03.2020 | APEC 2020 | Public | Topic: Design Space of Flyback Transformers 2 © All rights reserved by Wurth Electronics, also in the event of industrial property rights. All rights of disposal such as copying and redistribution rights with us. www.we-online.com Background . The term ‘flyback’ comes from the days of cathode ray tube (CRT) in televisions and monitors where the beam had to fly back after each scan to the start position for the next scan line. This required a high horizontal deflection voltage between 10 - 50 kV . Today typically used in universal wide input charging adapters outputting low voltage . Flyback converters come in many flavors DCM, CCM, BCM, QRM, … US Patent US3665288A - 1972 Theodore J Godawski Zenith Electronics LLC Date 16.03.2020 | APEC 2020 | Public | Topic: Design Space of Flyback Transformers 3 © All rights reserved by Wurth Electronics, also in the event of industrial property rights. All rights of disposal such as copying and redistribution rights with us. www.we-online.com Operation . T1 – switch is on – increasing current flow through primary winding building magnetic D1 V field – no current in secondary winding - IN T1 VOUT load supplied from capacitor C1 C2 . T2 – switch is off – decreasing current flow in secondary winding as magnetic field collapses – no current in primary winding Q1 Current, Q1 on . -

Instructables.Com/Id/AA-Battery-Powered-Tesla-Coil/ Intro: AA Battery Powered "Tesla Coil" First Things First
Home Sign Up! Browse Community Submit All Art Craft Food Games Green Home Kids Life Music Offbeat Outdoors Pets Photo Ride Science Tech AA Battery Powered "Tesla Coil" by JoeBeau on July 4, 2011 Table of Contents AA Battery Powered "Tesla Coil" . 1 Intro: AA Battery Powered "Tesla Coil" . 2 Step 1: Parts and Pieces . 2 Step 2: Dismantle the Zapper . 4 Step 3: Prepare the Zapper Circuit . 4 Step 4: Spark Gap . 5 Step 5: Flyback Transformer . 6 Step 6: Putting it All Together . 7 Step 7: Top Load and Mounting the Circuit . 8 Related Instructables . 9 Comments . 10 http://www.instructables.com/id/AA-Battery-Powered-Tesla-Coil/ Intro: AA Battery Powered "Tesla Coil" First things first: DISCLAIMER: I am not responsible for any injuries or property damage that may befall you from following this instructable. High voltage electricity can be DANGEROUS and should only be worked with at your own risk. Proper safety precautions should always be followed. That out of the way, welcome to my first instructable. Seeing as this is my first, any suggestions for improvements are greatly appreciated. Just go easy on me. This is intended to be a how-to guide for a newbie to high voltage (like myself) looking for a quick, cheap, and relatively safe project. Although this is not a true tesla coil, as it does not utilize a resonant air-core transformer or operate at high frequencies, in effect it is similar. It still throws out plasma discharges from the top load and about 3.5 centimeter arcs to ground.