The Solar System's Invariable Plane
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Calibration of the Angular Momenta of the Minor Planets in the Solar System Jian Li1, Zhihong Jeff Xia2, Liyong Zhou1
Astronomy & Astrophysics manuscript no. arXiv c ESO 2019 September 26, 2019 Calibration of the angular momenta of the minor planets in the solar system Jian Li1, Zhihong Jeff Xia2, Liyong Zhou1 1School of Astronomy and Space Science & Key Laboratory of Modern Astronomy and Astrophysics in Ministry of Education, Nanjing University, 163 Xianlin Road, Nanjing 210023, PR China e-mail: [email protected] 2Department of Mathematics, Northwestern University, 2033 Sheridan Road, Evanston, IL 60208, USA e-mail: [email protected] September 26, 2019 ABSTRACT Aims. We aim to determine the relative angle between the total angular momentum of the minor planets and that of the Sun-planets system, and to improve the orientation of the invariable plane of the solar system. Methods. By utilizing physical parameters available in public domain archives, we assigned reasonable masses to 718041 minor plan- ets throughout the solar system, including near-Earth objects, main belt asteroids, Jupiter trojans, trans-Neptunian objects, scattered- disk objects, and centaurs. Then we combined the orbital data to calibrate the angular momenta of these small bodies, and evaluated the specific contribution of the massive dwarf planets. The effects of uncertainties on the mass determination and the observational incompleteness were also estimated. Results. We determine the total angular momentum of the known minor planets to be 1:7817 × 1046 g · cm2 · s−1. The relative angle α between this vector and the total angular momentum of the Sun-planets system is calculated to be about 14:74◦. By excluding the dwarf planets Eris, Pluto, and Haumea, which have peculiar angular momentum directions, the angle α drops sharply to 1:76◦; a similar result applies to each individual minor planet group (e.g., trans-Neptunian objects). -

Tilting Saturn II. Numerical Model
Tilting Saturn II. Numerical Model Douglas P. Hamilton Astronomy Department, University of Maryland College Park, MD 20742 [email protected] and William R. Ward Southwest Research Institute Boulder, CO 80303 [email protected] Received ; accepted Submitted to the Astronomical Journal, December 2003 Resubmitted to the Astronomical Journal, June 2004 – 2 – ABSTRACT We argue that the gas giants Jupiter and Saturn were both formed with their rotation axes nearly perpendicular to their orbital planes, and that the large cur- rent tilt of the ringed planet was acquired in a post formation event. We identify the responsible mechanism as trapping into a secular spin-orbit resonance which couples the angular momentum of Saturn’s rotation to that of Neptune’s orbit. Strong support for this model comes from i) a near match between the precession frequencies of Saturn’s pole and the orbital pole of Neptune and ii) the current directions that these poles point in space. We show, with direct numerical inte- grations, that trapping into the spin-orbit resonance and the associated growth in Saturn’s obliquity is not disrupted by other planetary perturbations. Subject headings: planets and satellites: individual (Saturn, Neptune) — Solar System: formation — Solar System: general 1. INTRODUCTION The formation of the Solar System is thought to have begun with a cold interstellar gas cloud that collapsed under its own self-gravity. Angular momentum was preserved during the process so that the young Sun was initially surrounded by the Solar Nebula, a spinning disk of gas and dust. From this disk, planets formed in a sequence of stages whose details are still not fully understood. -

Long Term Behavior of a Hypothetical Planet in a Highly Eccentric Orbit
Long term behavior of a hypothetical planet in a highly eccentric orbit R. Nufer,∗ W. Baltensperger,† W. Woelfli‡ March 29, 2018 Abstract crossed this cloud, molecules activating a Green- house effect were produced in the upper atmosphere For a hypothetical planet on a highly eccentric or- in an amount sufficient to transiently enhance the bit, we have calculated the osculating orbital pa- mean surface temperature on Earth. Very close rameters and its closest approaches to Earth and flyby events even resulted in earthquakes and vol- Moon over a period of 750 kyr. The approaches canic activities. In extreme cases, a rotation of the which are close enough to influence the climate of entire Earth relative to its rotation axis occured in the Earth form a pattern comparable to that of the response to the transient strong gravitational inter- past climatic changes, as recorded in deep sea sedi- action. These polar shifts took place with a fre- ments and polar ice cores. quency of about one in one million years on the average. The first of them was responsible for the major drop in mean temperature, whereas the last 1 Motivation one terminated Earth’s Pleistocene Ice Age 11.5 kyr ago. At present, planet Z does not exist any more. The information on Earth’s past climate obtained The high eccentricity of Z’s orbit corresponds to from deep sea sediments and polar ice cores indi- a small orbital angular momentum. This could be cates that the global temperature oscillated with a transferred to one of the inner planets during a close small amplitude around a constant mean value for encounter, so that Z plunged into the sun. -

Orbital Resonances in the Inner Neptunian System I. the 2:1 Proteus–Larissa Mean-Motion Resonance Ke Zhang ∗, Douglas P
Icarus 188 (2007) 386–399 www.elsevier.com/locate/icarus Orbital resonances in the inner neptunian system I. The 2:1 Proteus–Larissa mean-motion resonance Ke Zhang ∗, Douglas P. Hamilton Department of Astronomy, University of Maryland, College Park, MD 20742, USA Received 1 June 2006; revised 22 November 2006 Available online 20 December 2006 Abstract We investigate the orbital resonant history of Proteus and Larissa, the two largest inner neptunian satellites discovered by Voyager 2.Due to tidal migration, these two satellites probably passed through their 2:1 mean-motion resonance a few hundred million years ago. We explore this resonance passage as a method to excite orbital eccentricities and inclinations, and find interesting constraints on the satellites’ mean density 3 3 (0.05 g/cm < ρ¯ 1.5g/cm ) and their tidal dissipation parameters (Qs > 10). Through numerical study of this mean-motion resonance passage, we identify a new type of three-body resonance between the satellite pair and Triton. These new resonances occur near the traditional two-body resonances between the small satellites and, surprisingly, are much stronger than their two-body counterparts due to Triton’s large mass and orbital inclination. We determine the relevant resonant arguments and derive a mathematical framework for analyzing resonances in this special system. © 2007 Elsevier Inc. All rights reserved. Keywords: Resonances, orbital; Neptune, satellites; Triton; Satellites, dynamics 1. Introduction Most of the debris was probably swept up by Triton (Cuk´ and Gladman, 2005), while some material close to Neptune sur- Prior to the Voyager 2 encounter, large icy Triton and dis- vived to form a new generation of satellites with an accretion tant irregular Nereid were Neptune’s only known satellites. -

Exploring the Orbital Evolution of Planetary Systems
Exploring the orbital evolution of planetary systems Tabar´e Gallardo∗ Instituto de F´ısica, Facultad de Ciencias, Udelar. (Dated: January 22, 2017) The aim of this paper is to encourage the use of orbital integrators in the classroom to discover and understand the long term dynamical evolution of systems of orbiting bodies. We show how to perform numerical simulations and how to handle the output data in order to reveal the dynamical mechanisms that dominate the evolution of arbitrary planetary systems in timescales of millions of years using a simple but efficient numerical integrator. Trough some examples we reveal the fundamental properties of the planetary systems: the time evolution of the orbital elements, the free and forced modes that drive the oscillations in eccentricity and inclination, the fundamental frequencies of the system, the role of the angular momenta, the invariable plane, orbital resonances and the Kozai-Lidov mechanism. To be published in European Journal of Physics. 2 I. INTRODUCTION With few exceptions astronomers cannot make experiments, they are limited to observe the universe. The laboratory for the astronomer usually takes the form of computer simulations. This is the most important instrument for the study of the dynamical behavior of gravitationally interacting bodies. A planetary system, for example, evolves mostly due to gravitation acting over very long timescales generating what is called a secular evolution. This secular evolution can be deduced analytically by means of the theory of perturbations, but can also be explored in the classroom by means of precise numerical integrators. Some facilities exist to visualize and experiment with the gravitational interactions between massive bodies1–3. -

Forced Obliquities and Moments of Inertia of Ceres and Vesta ⇑ B.G
Icarus 213 (2011) 496–509 Contents lists available at ScienceDirect Icarus journal homepage: www.elsevier.com/locate/icarus Forced obliquities and moments of inertia of Ceres and Vesta ⇑ B.G. Bills a, , F. Nimmo b a Jet Propulsion Laboratory, Pasadena, CA 91109, USA b Department of Earth and Planetary Sciences, University of California Santa Cruz, Santa Cruz, CA 95064, USA article info abstract Article history: We examine models of secular variations in the orbit and spin poles of Ceres and Vesta, the two most Received 22 July 2009 massive bodies in the main asteroid belt. If the spin poles are fully damped, then the current values of Revised 30 August 2010 obliquity, or angular separation between spin and orbit poles, are diagnostic of the moments of inertia Accepted 1 September 2010 and thus indicative of the extent of differentiation of these bodies. Using existing shape models and Available online 21 September 2010 assuming uniform density, the present obliquity values are predicted to be 12.31° for Ceres and 15.66° for Vesta. Part of this difference is related to differing orbital inclinations; a more centrally condensed Keywords: internal structure would yield more rapid spin pole precession, and larger obliquity. Time scales for tidal Asteroids, Dynamics damping are expected to be rather long. However, at least for Vesta, current estimates of the spin pole Asteroid Ceres Asteroid Vesta location are consistent with its obliquity being fully damped. When the degree two gravity coefficients Rotational dynamics and spin pole orientations are determined by the Dawn spacecraft, it will allow accurate determination of the moments of inertia of these bodies, assuming the obliquities are damped. -

Astro 250: Solutions to Problem Set 5 by Eugene Chiang
Astro 250: Solutions to Problem Set 5 by Eugene Chiang Problem 1. Precessing Planes and the Invariable Plane Consider a star of mass mc orbited by two planets on nearly circular orbits. The mass and semi-major axis of the inner planet are m1 and a1, respectively, and those of the outer planet, m2 = (1/2) × m1 and a2 = 4 × a1. The mutual inclination between the two orbits is i 1. This problem explores the inclination and nodal behavior of the two planets. a) What is the inclination of each planet with respect to the invariable plane of the system? The invariable plane is perpendicular to the total (vector) angular momentum of all planetary orbits. Neglect the contribution of orbital eccentricity to the angular momentum. Call these inclinations i1 and i2. The masses and semi-major axes of the two planets are so chosen as to make the arithmetic easy;√ the norm of each planet’s angular momentum is the same as the other, |~l1| = |~l2| = m1 Gmca1. Orient the x-y axes in the invariable plane so that the y-axis lies along the line of intersection between the two orbit planes (the nodal line). Then in the x-z plane, the total angular momentum vector lies along the z-axis, while ~l1 lies (say) in quadrant II and makes an angle with respect to the z-axis of i1 > 0, while l~2 lies in quadrant I and makes an angle with respect to the z-axis of i2 > 0. Remember that the mutual inclination i = i1 + i2. -
Iso and Asteroids
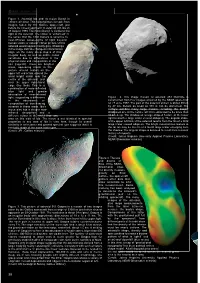
r bulletin 108 Figure 1. Asteroid Ida and its moon Dactyl in enhanced colour. This colour picture is made from images taken by the Galileo spacecraft just before its closest approach to asteroid 243 Ida on 28 August 1993. The moon Dactyl is visible to the right of the asteroid. The colour is ‘enhanced’ in the sense that the CCD camera is sensitive to near-infrared wavelengths of light beyond human vision; a ‘natural’ colour picture of this asteroid would appear mostly grey. Shadings in the image indicate changes in illumination angle on the many steep slopes of this irregular body, as well as subtle colour variations due to differences in the physical state and composition of the soil (regolith). There are brighter areas, appearing bluish in the picture, around craters on the upper left end of Ida, around the small bright crater near the centre of the asteroid, and near the upper right-hand edge (the limb). This is a combination of more reflected blue light and greater absorption of near-infrared light, suggesting a difference Figure 2. This image mosaic of asteroid 253 Mathilde is in the abundance or constructed from four images acquired by the NEAR spacecraft composition of iron-bearing on 27 June 1997. The part of the asteroid shown is about 59 km minerals in these areas. Ida’s by 47 km. Details as small as 380 m can be discerned. The moon also has a deeper near- surface exhibits many large craters, including the deeply infrared absorption and a shadowed one at the centre, which is estimated to be more than different colour in the violet than any 10 km deep. -
![Arxiv:2106.15589V1 [Astro-Ph.EP] 29 Jun 2021](https://docslib.b-cdn.net/cover/1306/arxiv-2106-15589v1-astro-ph-ep-29-jun-2021-1761306.webp)
Arxiv:2106.15589V1 [Astro-Ph.EP] 29 Jun 2021
Draft version June 30, 2021 Typeset using LATEX twocolumn style in AASTeX63 Evidence for a Non-Dichotomous Solution to the Kepler Dichotomy: Mutual Inclinations of Kepler Planetary Systems from Transit Duration Variations Sarah C. Millholland ,1, ∗ Matthias Y. He ,2, 3, 4, 5 Eric B. Ford ,2, 3, 4, 5, 6 Darin Ragozzine ,7 Daniel Fabrycky ,8 and Joshua N. Winn 1 1Department of Astrophysical Sciences, Princeton University, 4 Ivy Lane, Princeton, NJ 08544, USA 2Department of Astronomy & Astrophysics, 525 Davey Laboratory, The Pennsylvania State University, University Park, PA 16802, USA 3Center for Exoplanets & Habitable Worlds, 525 Davey Laboratory, The Pennsylvania State University, University Park, PA 16802, USA 4Center for Astrostatistics, 525 Davey Laboratory, The Pennsylvania State University, University Park, PA 16802, USA 5Institute for Computational & Data Sciences, 525 Davey Laboratory, The Pennsylvania State University, University Park, PA 16802, USA 6Institute for Advanced Study, Einstein Drive, Princeton, NJ 08540, USA 7Department of Physics & Astronomy, N283 ESC, Brigham Young University, Provo, UT 84602, USA 8Department of Astronomy and Astrophysics, University of Chicago, 5640 S Ellis Ave, Chicago, IL 60637, USA ABSTRACT Early analyses of exoplanet statistics from the Kepler Mission revealed that a model population of multiple-planet systems with low mutual inclinations (∼ 1◦ − 2◦) adequately describes the multiple- transiting systems but underpredicts the number of single-transiting systems. This so-called \Kepler dichotomy" signals the existence of a sub-population of multi-planet systems possessing larger mutual inclinations. However, the details of these inclinations remain uncertain. In this work, we derive constraints on the intrinsic mutual inclination distribution by statistically exploiting Transit Duration Variations (TDVs) of the Kepler planet population. -

1949 Handbook of the British Astronomical Association
THE HANDBOOK OF THE BRITISH ASTRONOMICAL ASSOCIATION 1 9 4 9 1948 NOVEMBER Price to Members 3s. N on Members 5s. CONTENTS Preface ... ... ... ... ... ... ... 1 Planetary Diagram ... ... ... ' ... 2 V i s i b i l i t y o f P l a n e t s ....................................................................... ........................................................................ 3 Tim e Reckoning .........................! ............................ ........................................................................ 4 S u n , 1 9 4 9 ............................................................................................................................................................... 5 Eclipses, 1949 .................................................................... .. ............................_ .................................. 8 M o o n , 1 9 4 9 . ....................................................................... ............................ 9 L i b r a t i o n ............................................................................................. .................................................. 1 0 O b s e r v a t i o n o f O c c u l t a t i o n s . .................................................................................................................... 1 0 L unar O ccultations, 1949 ........................... .................................................. 1 2 A p p e a r a n c e o f P l a n e t s ................................................................... .................................................................... -

Transneptunian Object Taxonomy 181
Fulchignoni et al.: Transneptunian Object Taxonomy 181 Transneptunian Object Taxonomy Marcello Fulchignoni LESIA, Observatoire de Paris Irina Belskaya Kharkiv National University Maria Antonietta Barucci LESIA, Observatoire de Paris Maria Cristina De Sanctis IASF-INAF, Rome Alain Doressoundiram LESIA, Observatoire de Paris A taxonomic scheme based on multivariate statistics is proposed to distinguish groups of TNOs having the same behavior concerning their BVRIJ colors. As in the case of asteroids, the broadband spectrophotometry provides a first hint about the bulk compositional properties of the TNOs’ surfaces. Principal components (PC) analysis shows that most of the TNOs’ color variability can be accounted for by a single component (i.e., a linear combination of the col- ors): All the studied objects are distributed along a quasicontinuous trend spanning from “gray” (neutral color with respect to those of the Sun) to very “red” (showing a spectacular increase in the reflectance of the I and J bands). A finer structure is superimposed to this trend and four homogeneous “compositional” classes emerge clearly, and independently from the PC analy- sis, if the TNO sample is analyzed with a grouping technique (the G-mode statistics). The first class (designed as BB) contains the objects that are neutral in color with respect to the Sun, while the RR class contains the very red ones. Two intermediate classes are separated by the G mode: the BR and the IR, which are clearly distinguished by the reflectance relative increases in the R and I bands. Some characteristics of the classes are deduced that extend to all the objects of a given class the properties that are common to those members of the class for which more detailed data are available (observed activity, full spectra, albedo). -

This Restless Globe
www.astrosociety.org/uitc No. 45 - Winter 1999 © 1999, Astronomical Society of the Pacific, 390 Ashton Avenue, San Francisco, CA 94112. This Restless Globe A Look at the Motions of the Earth in Space and How They Are Changing by Donald V. Etz The Major Motions of the Earth How These Motions Are Changing The Orientation of the Earth in Space The Earth's Orbit Precession in Human History The Motions of the Earth and the Climate Conclusion Our restless globe and its companion. While heading out for The Greek philosopher Heraclitus of Ephesus, said 2500 years ago that the its rendezvous with Jupiter, a camera on NASA's Galileo perceptible world is always changing. spacecraft snapped this 1992 image of Earth and its Moon. The Heraclitus was not mainstream, of course. Among his contemporaries were terminator, or line between night and day, is clearly visible on the philosophers like Zeno of Elea, who used his famous paradoxes to argue that two worlds. Image courtesy of change and motion are logically impossible. And Aristotle, much admired in NASA. ancient Greece and Rome, and the ultimate authority in medieval Europe, declared "...the earth does not move..." We today know that Heraclitus was right, Aristotle was wrong, and Zeno...was a philosopher. Everything in the heavens moves, from the Earth on which we ride to the stars in the most distant galaxies. As James B. Kaler has pointed out in The Ever-Changing Sky: "The astronomer quickly learns that nothing is truly stationary. There are no fixed reference frames..." The Earth's motions in space establish our basic units of time measurement and the yearly cycle of the seasons.