Modeling and Animating Myriapoda: a Real-Time Kinematic/Dynamic Approach
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Phylogenomic Resolution of Sea Spider Diversification Through Integration Of
bioRxiv preprint doi: https://doi.org/10.1101/2020.01.31.929612; this version posted February 2, 2020. The copyright holder for this preprint (which was not certified by peer review) is the author/funder. All rights reserved. No reuse allowed without permission. Phylogenomic resolution of sea spider diversification through integration of multiple data classes 1Jesús A. Ballesteros†, 1Emily V.W. Setton†, 1Carlos E. Santibáñez López†, 2Claudia P. Arango, 3Georg Brenneis, 4Saskia Brix, 5Esperanza Cano-Sánchez, 6Merai Dandouch, 6Geoffrey F. Dilly, 7Marc P. Eleaume, 1Guilherme Gainett, 8Cyril Gallut, 6Sean McAtee, 6Lauren McIntyre, 9Amy L. Moran, 6Randy Moran, 5Pablo J. López-González, 10Gerhard Scholtz, 6Clay Williamson, 11H. Arthur Woods, 12Ward C. Wheeler, 1Prashant P. Sharma* 1 Department of Integrative Biology, University of Wisconsin–Madison, Madison, WI, USA 2 Queensland Museum, Biodiversity Program, Brisbane, Australia 3 Zoologisches Institut und Museum, Cytologie und Evolutionsbiologie, Universität Greifswald, Greifswald, Germany 4 Senckenberg am Meer, German Centre for Marine Biodiversity Research (DZMB), c/o Biocenter Grindel (CeNak), Martin-Luther-King-Platz 3, Hamburg, Germany 5 Biodiversidad y Ecología Acuática, Departamento de Zoología, Facultad de Biología, Universidad de Sevilla, Sevilla, Spain 6 Department of Biology, California State University-Channel Islands, Camarillo, CA, USA 7 Départment Milieux et Peuplements Aquatiques, Muséum national d’Histoire naturelle, Paris, France 8 Institut de Systématique, Emvolution, Biodiversité (ISYEB), Sorbonne Université, CNRS, Concarneau, France 9 Department of Biology, University of Hawai’i at Mānoa, Honolulu, HI, USA Page 1 of 31 bioRxiv preprint doi: https://doi.org/10.1101/2020.01.31.929612; this version posted February 2, 2020. The copyright holder for this preprint (which was not certified by peer review) is the author/funder. -

MYRIAPODS 767 Volume 2 (M-Z), Pp
In: R. Singer, (ed.), 1999. Encyclopedia of Paleontology, MYRIAPODS 767 volume 2 (M-Z), pp. 767-775. Fitzroy Dearborn, London. MYRIAPODS JVlyriapods are many-legged, terrestrial arthropods whose bodies groups, the Trilobita, Chelicerata, Crustacea, and the Uniramia, the are divided into two major parts, a head and a trunk. The head last consisting of the Myriapoda, Hexapoda, and Onychophora (vel- bears a single pair of antennae, highly differentiated mandibles (or vet worms). However, subsequent structural and molecular evidence jaws), and at least one pair of maxillary mouthparts; the trunk indicates that there are several characters uniting major arthropod region consists of similar "metameres," each of which is a func- taxa. Moreover, paleobiologic, embryologie, and other evidence tional segment that bears one or two pairs of appendages. Gas demonstrates that myriapods and hexapods are fiindamentally exchange is accomplished by tracheae•a branching network of polyramous, having two major articulating appendages per embry- specialized tubules•although small forms respire through the ological body segment, like other arthropods. body wall. Malpighian organs are used for excretion, and eyes con- A fourth proposal (Figure ID) suggests that myriapods are sist of clusters of simple, unintegrated, light-sensitive elements an ancient, basal arthropod lineage, and that the Hexapoda that are termed ommatidia. These major features collectively char- emerged as an independent, relatively recent clade from a rather acterize the five major myriapod clades: Diplopoda (millipeds), terminal crustacean lineage, perhaps the Malacostraca, which con- Chilopoda (centipeds), Pauropoda (pauropods), Symphyla (sym- tains lobsters and crabs (Ballard et al. 1992). Because few crusta- phylans), and Arthropleurida (arthropleurids). Other features cean taxa were examined in this analysis, and due to the Cambrian indicate differences among these clades. -

On the Presence of Scutigera Coleoptrata (Linnaeus, 1758) (Chilopoda: Scutigeromorpha: Scutigeridae) in the Metropolitan Region, Chile
MASUMOTO, K., G. DELLACASA & M. KIUCHI 1990. On the Aphodius de Storia naturale, Milano, 114: 51-70. ● REITTER, E. 1895. Einige species of Japan. Entomological Review of Japan, 45: 145-156. ● neue Coleopteren aus Korea und China. Wiener entomologische MÜLLER, G. 1941. Nuovi Coleotteri dell’Africa Orientale. Atti del Zeitung, 14: 208-210. ● SCHMIDT, A. 1907. Zusammentellung der Museo civico di Storia naturale di Trieste, 14: 319-352. ● NEAVE, bis 1906 beschriebenen Aphodiinen. Deutsche entomologische S.A. 1939. Nomenclator Zoologicus. A List of the Names of Genera Zeitschrift, Beilage, 1907-1908: 1-141. ● SCHMIDT, A. 1910a. Col- and Subgenera in Zoology from the Tenth Edition of Linnaeus 1758 eoptera Lamellicornia, Fam. Aphodiidae. 110me Fascicule. In: P. to the End of 1935. Vol. 1, A-C. The Zoological Society of London, Wytsman (ed.), Genera Insectorum. Tervueren, 155 pp, 3 pls. ● London, xiv + 957 pp. ● PAULIAN, R. 1942. Exploration du Parc SCHMIDT, A. 1910b. Aphodiinae. Pars 20, Vol. 19(4). In: S. Schenk- National Albert. Mission G. F. de Witte (1933-35). Fasc. 35. Aphodi- ling (ed.), Coleopterorum Catalogus. W. Junk, Berlin, 111 pp. ● inae (Coleoptera Lamellicornia) Fam. Scarabaeidae. Institut des SCHMIDT, A. 1913. Erster Versuch einer Einteilung der exotischen Parcs Nationaux du Congo Belge, 143 pp., 23 pls. ● PETROVITZ, R. Aphodien in Subgenera und als Anhang einige Neubeschreibungen. 1958. Neue afrikanischen Aphodiusarten (Col. Scarab.). Entomolo- Archiv für Naturgeschichte. Abtheilung A, Original-Arbeiten, 79: 117- gische Arbeiten aus dem Museum G. Frey, 9: 140-159. ● 178. ● SCHMIDT, A. 1922. Coleoptera, Aphodiinae. In: C. Apstein PETROVITZ, R. 1962. Neue und verkannte Aphodiinae aus allen (ed.), Das Tierreich. -
Introduction to the Myriapoda
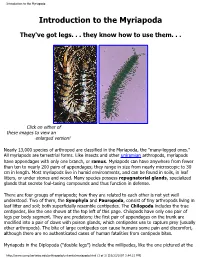
Introduction to the Myriapoda Introduction to the Myriapoda They've got legs. they know how to use them. Click on either of these images to view an enlarged version! Nearly 13,000 species of arthropod are classified in the Myriapoda, the "many-legged ones." All myriapods are terrestrial forms. Like insects and other uniramian arthropods, myriapods have appendages with only one branch, or ramus. Myriapods can have anywhere from fewer than ten to nearly 200 pairs of appendages; they range in size from nearly microscopic to 30 cm in length. Most myriapods live in humid environments, and can be found in soils, in leaf litters, or under stones and wood. Many species possess repugnatorial glands, specialized glands that secrete foul-tasing compounds and thus function in defense. There are four groups of myriapods; how they are related to each other is not yet well understood. Two of them, the Symphyla and Pauropoda, consist of tiny arthropods living in leaf litter and soil; both superficially resemble centipedes. The Chilopoda includes the true centipedes, like the one shown at the top left of this page. Chilopods have only one pair of legs per body segment. They are predators; the first pair of appendages on the trunk are modified into a pair of claws with poison glands, which centipedes use to capture prey (usually other arthropods). The bite of large centipedes can cause humans some pain and discomfort, although there are no authenticated cases of human fatalities from centipede bites. Myriapods in the Diplopoda ("double legs") include the millipedes, like the one pictured at the http://www.ucmp.berkeley.edu/arthropoda/uniramia/myriapoda.html (1 of 3) [10/23/2007 3:44:21 PM] Introduction to the Myriapoda top right of this page. -

Millipedes and Centipedes? Millipedes and Centipedes Are Both Arthropods in the Subphylum Myriapoda Meaning Many Legs
A Teacher’s Resource Guide to Millipedes & Centipedes Compiled by Eric Gordon What are millipedes and centipedes? Millipedes and centipedes are both arthropods in the subphylum Myriapoda meaning many legs. Although related to insects or “bugs”, they are not actually insects, which generally have six legs. How can you tell the difference between millipedes and centipedes? Millipedes have two legs per body segment and are typically have a body shaped like a cylinder or rod. Centipedes have one leg per body segment and their bodies are often flat. Do millipedes really have a thousand legs? No. Millipedes do not have a thousand legs nor do all centipedes have a hundred legs despite their names. Most millipedes have from 40-400 legs with the maximum number of legs reaching 750. No centipede has exactly 100 legs (50 pairs) since centipedes always have an odd number of pairs of legs. Most centipedes have from 30- 50 legs with one order of centipedes (Geophilomorpha) always having much more legs reaching up to 350 legs. Why do millipedes and centipedes have so many legs? Millipedes and centipedes are metameric animals, meaning that their body is divided into segments most of which are completely identical. Metamerization is an important phenomenon in evolution and even humans have a remnant of former metamerization in the repeating spinal discs of our backbone. Insects are thought to have evolved from metameric animals after specializing body segments for specific functions such as the head for sensation and the thorax for locomotion. Millipedes and centipedes may be evolutionary relatives to the ancestor of insects and crustaceans. -

(Includes Insects) Myriapods Pycnogonids Limulids Arachnids
N. Dean Pentcheff Insect Friends and Relations Regina Wetzer What do we know How do we know that? about arthropod relationships? Examples of lines of evidence: Onychophorans Genetics and Genomics Genomic approaches The figures at left show the can look at patterns protein structure of opsins Common of occurrence of (visual pigments). Yellow iden- tifies areas of the protein that Ancestor of whole genes across Crustaceans (includes Insects) have important evolutionary Panarthropoda taxa to identify pat- terns of common and functional differences. This ancestry. provides information about how the opsin gene family has Cook, C. E., Smith, M. L., evolved across different taxa. Telford, M. J., Bastianello, Myriapods A., Akam, M. 2001. Hox Porter, M. L., Cronin, T. W., McClellan, Panarthropoda genes and the phylogeny D. A., Crandall, K. A. 2007. Molecular of the arthropods. Cur- characterization of crustacean visual rent Biology 11: 759-763. pigments and the evolution of pan- crustacean opsins. Molecular Biology This phylogenetic tree of the Arthropoda and Evolution 24(1): 253-268. Arthropoda Pycnogonids outlines our best current knowledge about relationships in the group. Dunn, C.W. et al. 2008. Broad phylogenetic sampling improves resolution of the animal tree of life. Nature Morphology 452: 745-749. Limulids Comparing similarities and differences among arthropod appendages is a fertile source of infor- Chelicerata mation about patterns of ancestry. Morphological Arachnids evidence can be espec- ially valuable because it is available for both living Unraveling arthropod phylogeny and fossil taxa. There are about 1,100,000 described arthropods – 85% of multicellular animals! Segmentation, jointed appendages, and the devel- opment of pattern-forming genes profoundly affected arthropod evolution and created the most morphologically diverse taxon on [Left:] Cotton, T. -

Morphological Data, Extant Myriapoda, and the Myriapod Stem-Group
Contributions to Zoology, 73 (3) 207-252 (2004) SPB Academic Publishing bv, The Hague Morphological data, extant Myriapoda, and the myriapod stem-group Gregory+D. Edgecombe Australian Museum, 6 College Street, Sydney, NSW 2010, Australia, e-mail: [email protected] Keywords: Myriapoda, phylogeny, stem-group, fossils Abstract Tagmosis; long-bodied fossils 222 Fossil candidates for the stem-group? 222 Conclusions 225 The status ofMyriapoda (whether mono-, para- or polyphyletic) Acknowledgments 225 and controversial, position of myriapods in the Arthropoda are References 225 .. fossils that an impediment to evaluating may be members of Appendix 1. Characters used in phylogenetic analysis 233 the myriapod stem-group. Parsimony analysis of319 characters Appendix 2. Characters optimised on cladogram in for extant arthropods provides a basis for defending myriapod Fig. 2 251 monophyly and identifying those morphological characters that are to taxon to The necessary assign a fossil the Myriapoda. the most of the allianceofhexapods and crustaceans need notrelegate myriapods “Perhaps perplexing arthropod taxa 1998: to the arthropod stem-group; the Mandibulatahypothesis accom- are the myriapods” (Budd, 136). modates Myriapoda and Tetraconata as sister taxa. No known pre-Silurianfossils have characters that convincingly place them in the Myriapoda or the myriapod stem-group. Because the Introduction strongest apomorphies ofMyriapoda are details ofthe mandible and tentorial endoskeleton,exceptional fossil preservation seems confound For necessary to recognise a stem-group myriapod. Myriapods palaeontologists. all that Cambrian Lagerstdtten like the Burgess Shale and Chengjiang have contributed to knowledge of basal Contents arthropod inter-relationships, they are notably si- lent on the matter of myriapod origins and affini- Introduction 207 ties. -
Phylogenomics Illuminates the Backbone of the Myriapoda Tree of Life and Reconciles Morphological and Molecular Phylogenies
Phylogenomics illuminates the backbone of the Myriapoda Tree of Life and reconciles morphological and molecular phylogenies The Harvard community has made this article openly available. Please share how this access benefits you. Your story matters Citation Fernández, R., Edgecombe, G.D. & Giribet, G. Phylogenomics illuminates the backbone of the Myriapoda Tree of Life and reconciles morphological and molecular phylogenies. Sci Rep 8, 83 (2018). https://doi.org/10.1038/s41598-017-18562-w Citable link https://nrs.harvard.edu/URN-3:HUL.INSTREPOS:37366624 Terms of Use This article was downloaded from Harvard University’s DASH repository, and is made available under the terms and conditions applicable to Open Access Policy Articles, as set forth at http:// nrs.harvard.edu/urn-3:HUL.InstRepos:dash.current.terms-of- use#OAP Title: Phylogenomics illuminates the backbone of the Myriapoda Tree of Life and reconciles morphological and molecular phylogenies Rosa Fernández1,2*, Gregory D. Edgecombe3 and Gonzalo Giribet1 1 Museum of Comparative Zoology & Department of Organismic and Evolutionary Biology, Harvard University, 28 Oxford St., 02138 Cambridge MA, USA 2 Current address: Bioinformatics & Genomics, Centre for Genomic Regulation, Carrer del Dr. Aiguader 88, 08003 Barcelona, Spain 3 Department of Earth Sciences, The Natural History Museum, Cromwell Road, London SW7 5BD, UK *Corresponding author: [email protected] The interrelationships of the four classes of Myriapoda have been an unresolved question in arthropod phylogenetics and an example of conflict between morphology and molecules. Morphology and development provide compelling support for Diplopoda (millipedes) and Pauropoda being closest relatives, and moderate support for Symphyla being more closely related to the diplopod-pauropod group than any of them are to Chilopoda (centipedes). -

The Perception of Diplopoda (Arthropoda, Myriapoda) by the Inhabitants of the County of Pedra Branca, Santa Teresinha, Bahia, Brazil
Acta biol. Colomb., Vol. 12 No. 2, 2007 123 - 134 THE PERCEPTION OF DIPLOPODA (ARTHROPODA, MYRIAPODA) BY THE INHABITANTS OF THE COUNTY OF PEDRA BRANCA, SANTA TERESINHA, BAHIA, BRAZIL La percepción de diplopoda (Arthropoda, Myriapoda) por los habitantes del poblado de Pedra Branca, Santa Teresinha, Bahía, Brasil ERALDO M. COSTA NETO1, Ph. D. 1Universidade Estadual de Feira de Santana, Departamento de Ciências Biológicas, Laboratório de Etnobiologia, Km 03, BR 116, Campus Universitário, CEP 44031-460, Feira de Santana, Bahia, Brasil Fone/Fax: 75 32248019. [email protected] Presentado 30 de junio de 2006, aceptado 5 de diciembre 2006, correcciones 22 de mayo de 2007. ABSTRACT This paper deals with the conceptions, knowledge and attitudes of the inhabitants of the county of Pedra Branca, Bahia State, on the arthropods of the class Diplopoda. Data were collected from February to June 2005 by means of open-ended interviews carried out with 28 individuals, which ages ranged from 13 to 86 years old. It was recorded some traditional knowledge regarding the following items: taxonomy, biology, habitat, ecology, seasonality, and behavior. Results show that the diplopods are classified as “insects”. The characteristic of coiling the body was the most com- mented, as well as the fact that these animals are considered as “poisonous”. In gen- eral, the traditional zoological knowledge of Pedra Branca’s inhabitants concerning the diplopods is coherent with the academic knowledge. Key words: Ethnozoology, ethnomyriapodology, perception, millipede. RESUMEN Este artículo registra las concepciones, los conocimientos y los comportamientos que los habitantes del poblado de Pedra Branca, en el estado de Bahía, poseen sobre los artrópodos de la clase Diplopoda. -

Joachim Adis, Ed., Amazonian Arachnida and Myriapoda
Studies on Neotropical Fauna and Environment Taylor & Francis 2003, Vol. 38, No. 3, pp. 251-252 Taylor & Francis Croup BOOK REVIEW Joachim Adis, ed., Amazonian Arachnida and Myriapoda Pensoft Publishers, hardcover, 590 pages, 6 color plates. ISBN 9546421189, • 78.00, Sofia, Bulgaria, 2002 (www.pensoft.net) The Amazon basin has always been regarded as a nearly myriapod classes. Chapters on relatively less-diverse groups impenetrable place - perhaps even more to taxonomists than such as Amblypygi, Ricinulei, Palpigradi, Schizomida, to other kinds of explorers. Amazonian Arachnida and Myr- Scorpiones, Uropygi, and Lithobiomorpha treat, or attempt iapoda, led and edited by long-time Amazonian researcher to treat, Amazonian diversity at the species level. The Joachim Adis, rolls back that veil of ignorance on a huge chapter on scorpions by Wilson Lourenco is particularly group of Amazonian animals. good. It seems difficult to believe that only two species of At nearly 600 pages, the book is large, although no doubt lithobiomorph and one palpigrade inhabit Amazonia, but not large enough to do justice to the size of its subject (Ama- Adis and colleagues have made extensive litter collections zonia as defined by Ab'Saber in 1977). However, the keys so the mystery is not just lack of collecting effort. The will work over a much larger region, guaranteeing an even chapters on larger groups such as Araneae, Opiliones, larger audience. The authors are generally recognized world Pseudoscorpions, Solifugae (two Amazonian species specialists. Chapters cover oribatid mites (at 272 pages just known), and Diplopoda treat Amazonian diversity at the over half the book) by S. -

Morphological Data, Extant Myriapoda, and the Myriapod Stem-Group
Contributions to Zoology, 73 (3) 207-252 (2004) SPB Academic Publishing bv, The Hague Morphological data, extant Myriapoda, and the myriapod stem-group Gregory+D. Edgecombe Australian Museum, 6 College Street, Sydney, NSW 2010, Australia, e-mail: [email protected] Keywords: Myriapoda, phylogeny, stem-group, fossils Abstract Tagmosis; long-bodied fossils 222 Fossil candidates for the stem-group? 222 Conclusions 225 The status ofMyriapoda (whether mono-, para- or polyphyletic) Acknowledgments 225 and controversial, position of myriapods in the Arthropoda are References 225 .. fossils that an impediment to evaluating may be members of Appendix 1. Characters used in phylogenetic analysis 233 the myriapod stem-group. Parsimony analysis of319 characters Appendix 2. Characters optimised on cladogram in for extant arthropods provides a basis for defending myriapod Fig. 2 251 monophyly and identifying those morphological characters that are to taxon to The necessary assign a fossil the Myriapoda. the most of the allianceofhexapods and crustaceans need notrelegate myriapods “Perhaps perplexing arthropod taxa 1998: to the arthropod stem-group; the Mandibulatahypothesis accom- are the myriapods” (Budd, 136). modates Myriapoda and Tetraconata as sister taxa. No known pre-Silurianfossils have characters that convincingly place them in the Myriapoda or the myriapod stem-group. Because the Introduction strongest apomorphies ofMyriapoda are details ofthe mandible and tentorial endoskeleton,exceptional fossil preservation seems confound For necessary to recognise a stem-group myriapod. Myriapods palaeontologists. all that Cambrian Lagerstdtten like the Burgess Shale and Chengjiang have contributed to knowledge of basal Contents arthropod inter-relationships, they are notably si- lent on the matter of myriapod origins and affini- Introduction 207 ties. -
Distribution of Millipedes (Myriapoda, Diplopoda) Along a Forest Interior – Forest Edge – Grassland Habitat Complex
A peer-reviewed open-access journal ZooKeys 510: 181–195Distribution (2015) of millipedes (Myriapoda, Diplopoda) along a forest interior.. 181 doi: 10.3897/zookeys.510.8657 RESEARCH ARTICLE http://zookeys.pensoft.net Launched to accelerate biodiversity research Distribution of millipedes (Myriapoda, Diplopoda) along a forest interior – forest edge – grassland habitat complex Dávid Bogyó1,2, Tibor Magura1, Dávid D. Nagy3, Béla Tóthmérész3 1 Department of Ecology, University of Debrecen, P.O. Box 71, Debrecen H-4010, Hungary 2 Hortobágy National Park Directorate, P.O. Box 216, Debrecen H-4002, Hungary 3 MTA-DE Biodiversity and Ecosystem Services Research Group, P.O. Box 71, Debrecen H-4010, Hungary Corresponding author: Dávid Bogyó ([email protected]) Academic editor: Ivan H. Tuf | Received 27 September 2014 | Accepted 4 May 2015 | Published 30 June 2015 http://zoobank.org/47B52B34-E4BB-4F13-B5BE-162C2CD2AE7B Citation: Bogyó D, Magura T, Nagy DD, Tóthmérész B (2015) Distribution of millipedes (Myriapoda, Diplopoda) along a forest interior – forest edge – grassland habitat complex. In: Tuf IH, Tajovský K (Eds) Proceedings of the 16th International Congress of Myriapodology, Olomouc, Czech Republic. ZooKeys 510: 181–195. doi: 10.3897/zookeys.510.8657 Abstract We studied the distribution of millipedes in a forest interior-forest edge-grassland habitat complex in the Hajdúság Landscape Protection Area (NE Hungary). The habitat types were as follows: (1) lowland oak forest, (2) forest edge with increased ground vegetation and shrub cover, and (3) mesophilous grassland. We collected millipedes by litter and soil sifting. There were overall 30 sifted litter and soil samples: 3 habitat types × 2 replicates × 5 soil and litter samples per habitats.