Multi-Core Processors and Systems: State-Of-The-Art and Study of Performance Increase
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

2.5 Classification of Parallel Computers
52 // Architectures 2.5 Classification of Parallel Computers 2.5 Classification of Parallel Computers 2.5.1 Granularity In parallel computing, granularity means the amount of computation in relation to communication or synchronisation Periods of computation are typically separated from periods of communication by synchronization events. • fine level (same operations with different data) ◦ vector processors ◦ instruction level parallelism ◦ fine-grain parallelism: – Relatively small amounts of computational work are done between communication events – Low computation to communication ratio – Facilitates load balancing 53 // Architectures 2.5 Classification of Parallel Computers – Implies high communication overhead and less opportunity for per- formance enhancement – If granularity is too fine it is possible that the overhead required for communications and synchronization between tasks takes longer than the computation. • operation level (different operations simultaneously) • problem level (independent subtasks) ◦ coarse-grain parallelism: – Relatively large amounts of computational work are done between communication/synchronization events – High computation to communication ratio – Implies more opportunity for performance increase – Harder to load balance efficiently 54 // Architectures 2.5 Classification of Parallel Computers 2.5.2 Hardware: Pipelining (was used in supercomputers, e.g. Cray-1) In N elements in pipeline and for 8 element L clock cycles =) for calculation it would take L + N cycles; without pipeline L ∗ N cycles Example of good code for pipelineing: §doi =1 ,k ¤ z ( i ) =x ( i ) +y ( i ) end do ¦ 55 // Architectures 2.5 Classification of Parallel Computers Vector processors, fast vector operations (operations on arrays). Previous example good also for vector processor (vector addition) , but, e.g. recursion – hard to optimise for vector processors Example: IntelMMX – simple vector processor. -

Increasing Memory Miss Tolerance for SIMD Cores
Increasing Memory Miss Tolerance for SIMD Cores ∗ David Tarjan, Jiayuan Meng and Kevin Skadron Department of Computer Science University of Virginia, Charlottesville, VA 22904 {dtarjan, jm6dg,skadron}@cs.virginia.edu ABSTRACT that use a single instruction multiple data (SIMD) organi- Manycore processors with wide SIMD cores are becoming a zation can amortize the area and power overhead of a single popular choice for the next generation of throughput ori- frontend over a large number of execution backends. For ented architectures. We introduce a hardware technique example, we estimate that a 32-wide SIMD core requires called “diverge on miss” that allows SIMD cores to better about one fifth the area of 32 individual scalar cores. Note tolerate memory latency for workloads with non-contiguous that this estimate does not include the area of any intercon- memory access patterns. Individual threads within a SIMD nection network among the MIMD cores, which often grows “warp” are allowed to slip behind other threads in the same supra-linearly with the number of cores [18]. warp, letting the warp continue execution even if a subset of To better tolerate memory and pipeline latencies, many- core processors typically use fine-grained multi-threading, threads are waiting on memory. Diverge on miss can either 1 increase the performance of a given design by up to a factor switching among multiple warps, so that active warps can of 3.14 for a single warp per core, or reduce the number of mask stalls in other warps waiting on long-latency events. warps per core needed to sustain a given level of performance The drawback of this approach is that the size of the regis- from 16 to 2 warps, reducing the area per core by 35%. -

Computer Hardware Architecture Lecture 4
Computer Hardware Architecture Lecture 4 Manfred Liebmann Technische Universit¨atM¨unchen Chair of Optimal Control Center for Mathematical Sciences, M17 [email protected] November 10, 2015 Manfred Liebmann November 10, 2015 Reading List • Pacheco - An Introduction to Parallel Programming (Chapter 1 - 2) { Introduction to computer hardware architecture from the parallel programming angle • Hennessy-Patterson - Computer Architecture - A Quantitative Approach { Reference book for computer hardware architecture All books are available on the Moodle platform! Computer Hardware Architecture 1 Manfred Liebmann November 10, 2015 UMA Architecture Figure 1: A uniform memory access (UMA) multicore system Access times to main memory is the same for all cores in the system! Computer Hardware Architecture 2 Manfred Liebmann November 10, 2015 NUMA Architecture Figure 2: A nonuniform memory access (UMA) multicore system Access times to main memory differs form core to core depending on the proximity of the main memory. This architecture is often used in dual and quad socket servers, due to improved memory bandwidth. Computer Hardware Architecture 3 Manfred Liebmann November 10, 2015 Cache Coherence Figure 3: A shared memory system with two cores and two caches What happens if the same data element z1 is manipulated in two different caches? The hardware enforces cache coherence, i.e. consistency between the caches. Expensive! Computer Hardware Architecture 4 Manfred Liebmann November 10, 2015 False Sharing The cache coherence protocol works on the granularity of a cache line. If two threads manipulate different element within a single cache line, the cache coherency protocol is activated to ensure consistency, even if every thread is only manipulating its own data. -

Tousimojarad, Ashkan (2016) GPRM: a High Performance Programming Framework for Manycore Processors. Phd Thesis
Tousimojarad, Ashkan (2016) GPRM: a high performance programming framework for manycore processors. PhD thesis. http://theses.gla.ac.uk/7312/ Copyright and moral rights for this thesis are retained by the author A copy can be downloaded for personal non-commercial research or study This thesis cannot be reproduced or quoted extensively from without first obtaining permission in writing from the Author The content must not be changed in any way or sold commercially in any format or medium without the formal permission of the Author When referring to this work, full bibliographic details including the author, title, awarding institution and date of the thesis must be given Glasgow Theses Service http://theses.gla.ac.uk/ [email protected] GPRM: A HIGH PERFORMANCE PROGRAMMING FRAMEWORK FOR MANYCORE PROCESSORS ASHKAN TOUSIMOJARAD SUBMITTED IN FULFILMENT OF THE REQUIREMENTS FOR THE DEGREE OF Doctor of Philosophy SCHOOL OF COMPUTING SCIENCE COLLEGE OF SCIENCE AND ENGINEERING UNIVERSITY OF GLASGOW NOVEMBER 2015 c ASHKAN TOUSIMOJARAD Abstract Processors with large numbers of cores are becoming commonplace. In order to utilise the available resources in such systems, the programming paradigm has to move towards in- creased parallelism. However, increased parallelism does not necessarily lead to better per- formance. Parallel programming models have to provide not only flexible ways of defining parallel tasks, but also efficient methods to manage the created tasks. Moreover, in a general- purpose system, applications residing in the system compete for the shared resources. Thread and task scheduling in such a multiprogrammed multithreaded environment is a significant challenge. In this thesis, we introduce a new task-based parallel reduction model, called the Glasgow Parallel Reduction Machine (GPRM). -

Threading SIMD and MIMD in the Multicore Context the Ultrasparc T2
Overview SIMD and MIMD in the Multicore Context Single Instruction Multiple Instruction ● (note: Tute 02 this Weds - handouts) ● Flynn’s Taxonomy Single Data SISD MISD ● multicore architecture concepts Multiple Data SIMD MIMD ● for SIMD, the control unit and processor state (registers) can be shared ■ hardware threading ■ SIMD vs MIMD in the multicore context ● however, SIMD is limited to data parallelism (through multiple ALUs) ■ ● T2: design features for multicore algorithms need a regular structure, e.g. dense linear algebra, graphics ■ SSE2, Altivec, Cell SPE (128-bit registers); e.g. 4×32-bit add ■ system on a chip Rx: x x x x ■ 3 2 1 0 execution: (in-order) pipeline, instruction latency + ■ thread scheduling Ry: y3 y2 y1 y0 ■ caches: associativity, coherence, prefetch = ■ memory system: crossbar, memory controller Rz: z3 z2 z1 z0 (zi = xi + yi) ■ intermission ■ design requires massive effort; requires support from a commodity environment ■ speculation; power savings ■ massive parallelism (e.g. nVidia GPGPU) but memory is still a bottleneck ■ OpenSPARC ● multicore (CMT) is MIMD; hardware threading can be regarded as MIMD ● T2 performance (why the T2 is designed as it is) ■ higher hardware costs also includes larger shared resources (caches, TLBs) ● the Rock processor (slides by Andrew Over; ref: Tremblay, IEEE Micro 2009 ) needed ⇒ less parallelism than for SIMD COMP8320 Lecture 2: Multicore Architecture and the T2 2011 ◭◭◭ • ◮◮◮ × 1 COMP8320 Lecture 2: Multicore Architecture and the T2 2011 ◭◭◭ • ◮◮◮ × 3 Hardware (Multi)threading The UltraSPARC T2: System on a Chip ● recall concurrent execution on a single CPU: switch between threads (or ● OpenSparc Slide Cast Ch 5: p79–81,89 processes) requires the saving (in memory) of thread state (register values) ● aggressively multicore: 8 cores, each with 8-way hardware threading (64 virtual ■ motivation: utilize CPU better when thread stalled for I/O (6300 Lect O1, p9–10) CPUs) ■ what are the costs? do the same for smaller stalls? (e.g. -

Computer Architecture: Parallel Processing Basics
Computer Architecture: Parallel Processing Basics Onur Mutlu & Seth Copen Goldstein Carnegie Mellon University 9/9/13 Today What is Parallel Processing? Why? Kinds of Parallel Processing Multiprocessing and Multithreading Measuring success Speedup Amdhal’s Law Bottlenecks to parallelism 2 Concurrent Systems Embedded-Physical Distributed Sensor Claytronics Networks Concurrent Systems Embedded-Physical Distributed Sensor Claytronics Networks Geographically Distributed Power Internet Grid Concurrent Systems Embedded-Physical Distributed Sensor Claytronics Networks Geographically Distributed Power Internet Grid Cloud Computing EC2 Tashi PDL'09 © 2007-9 Goldstein5 Concurrent Systems Embedded-Physical Distributed Sensor Claytronics Networks Geographically Distributed Power Internet Grid Cloud Computing EC2 Tashi Parallel PDL'09 © 2007-9 Goldstein6 Concurrent Systems Physical Geographical Cloud Parallel Geophysical +++ ++ --- --- location Relative +++ +++ + - location Faults ++++ +++ ++++ -- Number of +++ +++ + - Processors + Network varies varies fixed fixed structure Network --- --- + + connectivity 7 Concurrent System Challenge: Programming The old joke: How long does it take to write a parallel program? One Graduate Student Year 8 Parallel Programming Again?? Increased demand (multicore) Increased scale (cloud) Improved compute/communicate Change in Application focus Irregular Recursive data structures PDL'09 © 2007-9 Goldstein9 Why Parallel Computers? Parallelism: Doing multiple things at a time Things: instructions, -

Thread-Level Parallelism I
Great Ideas in UC Berkeley UC Berkeley Teaching Professor Computer Architecture Professor Dan Garcia (a.k.a. Machine Structures) Bora Nikolić Thread-Level Parallelism I Garcia, Nikolić cs61c.org Improving Performance 1. Increase clock rate fs ú Reached practical maximum for today’s technology ú < 5GHz for general purpose computers 2. Lower CPI (cycles per instruction) ú SIMD, “instruction level parallelism” Today’s lecture 3. Perform multiple tasks simultaneously ú Multiple CPUs, each executing different program ú Tasks may be related E.g. each CPU performs part of a big matrix multiplication ú or unrelated E.g. distribute different web http requests over different computers E.g. run pptx (view lecture slides) and browser (youtube) simultaneously 4. Do all of the above: ú High fs , SIMD, multiple parallel tasks Garcia, Nikolić 3 Thread-Level Parallelism I (3) New-School Machine Structures Software Harness Hardware Parallelism & Parallel Requests Achieve High Assigned to computer Performance e.g., Search “Cats” Smart Phone Warehouse Scale Parallel Threads Computer Assigned to core e.g., Lookup, Ads Computer Core Core Parallel Instructions Memory (Cache) >1 instruction @ one time … e.g., 5 pipelined instructions Input/Output Parallel Data Exec. Unit(s) Functional Block(s) >1 data item @ one time A +B A +B e.g., Add of 4 pairs of words 0 0 1 1 Main Memory Hardware descriptions Logic Gates A B All gates work in parallel at same time Out = AB+CD C D Garcia, Nikolić Thread-Level Parallelism I (4) Parallel Computer Architectures Massive array -

Parallel Processing! 1! CSE 30321 – Lecture 23 – Introduction to Parallel Processing! 2! Suggested Readings! •! Readings! –! H&P: Chapter 7! •! (Over Next 2 Weeks)!
CSE 30321 – Lecture 23 – Introduction to Parallel Processing! 1! CSE 30321 – Lecture 23 – Introduction to Parallel Processing! 2! Suggested Readings! •! Readings! –! H&P: Chapter 7! •! (Over next 2 weeks)! Lecture 23" Introduction to Parallel Processing! University of Notre Dame! University of Notre Dame! CSE 30321 – Lecture 23 – Introduction to Parallel Processing! 3! CSE 30321 – Lecture 23 – Introduction to Parallel Processing! 4! Processor components! Multicore processors and programming! Processor comparison! vs.! Goal: Explain and articulate why modern microprocessors now have more than one core andCSE how software 30321 must! adapt to accommodate the now prevalent multi- core approach to computing. " Introduction and Overview! Writing more ! efficient code! The right HW for the HLL code translation! right application! University of Notre Dame! University of Notre Dame! CSE 30321 – Lecture 23 – Introduction to Parallel Processing! CSE 30321 – Lecture 23 – Introduction to Parallel Processing! 6! Pipelining and “Parallelism”! ! Load! Mem! Reg! DM! Reg! ALU ! Instruction 1! Mem! Reg! DM! Reg! ALU ! Instruction 2! Mem! Reg! DM! Reg! ALU ! Instruction 3! Mem! Reg! DM! Reg! ALU ! Instruction 4! Mem! Reg! DM! Reg! ALU Time! Instructions execution overlaps (psuedo-parallel)" but instructions in program issued sequentially." University of Notre Dame! University of Notre Dame! CSE 30321 – Lecture 23 – Introduction to Parallel Processing! CSE 30321 – Lecture 23 – Introduction to Parallel Processing! Multiprocessing (Parallel) Machines! Flynn#s -

Understanding and Guiding the Computing Resource Management in a Runtime Stacking Context
THÈSE PRÉSENTÉE À L’UNIVERSITÉ DE BORDEAUX ÉCOLE DOCTORALE DE MATHÉMATIQUES ET D’INFORMATIQUE par Arthur Loussert POUR OBTENIR LE GRADE DE DOCTEUR SPÉCIALITÉ : INFORMATIQUE Understanding and Guiding the Computing Resource Management in a Runtime Stacking Context Rapportée par : Allen D. Malony, Professor, University of Oregon Jean-François Méhaut, Professeur, Université Grenoble Alpes Date de soutenance : 18 Décembre 2019 Devant la commission d’examen composée de : Raymond Namyst, Professeur, Université de Bordeaux – Directeur de thèse Marc Pérache, Ingénieur-Chercheur, CEA – Co-directeur de thèse Emmanuel Jeannot, Directeur de recherche, Inria Bordeaux Sud-Ouest – Président du jury Edgar Leon, Computer Scientist, Lawrence Livermore National Laboratory – Examinateur Patrick Carribault, Ingénieur-Chercheur, CEA – Examinateur Julien Jaeger, Ingénieur-Chercheur, CEA – Invité 2019 Keywords High-Performance Computing, Parallel Programming, MPI, OpenMP, Runtime Mixing, Runtime Stacking, Resource Allocation, Resource Manage- ment Abstract With the advent of multicore and manycore processors as building blocks of HPC supercomputers, many applications shift from relying solely on a distributed programming model (e.g., MPI) to mixing distributed and shared- memory models (e.g., MPI+OpenMP). This leads to a better exploitation of shared-memory communications and reduces the overall memory footprint. However, this evolution has a large impact on the software stack as applications’ developers do typically mix several programming models to scale over a large number of multicore nodes while coping with their hiearchical depth. One side effect of this programming approach is runtime stacking: mixing multiple models involve various runtime libraries to be alive at the same time. Dealing with different runtime systems may lead to a large number of execution flows that may not efficiently exploit the underlying resources. -
Consolidating High-Integrity, High-Performance, and Cyber-Security Functions on a Manycore Processor
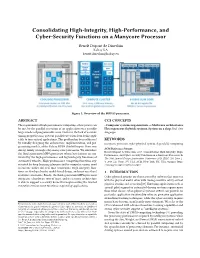
Consolidating High-Integrity, High-Performance, and Cyber-Security Functions on a Manycore Processor Benoît Dupont de Dinechin Kalray S.A. [email protected] Figure 1: Overview of the MPPA3 processor. ABSTRACT CCS CONCEPTS The requirement of high performance computing at low power can • Computer systems organization → Multicore architectures; be met by the parallel execution of an application on a possibly Heterogeneous (hybrid) systems; System on a chip; Real-time large number of programmable cores. However, the lack of accurate languages. timing properties may prevent parallel execution from being appli- cable to time-critical applications. This problem has been addressed KEYWORDS by suitably designing the architecture, implementation, and pro- manycore processor, cyber-physical system, dependable computing gramming models, of the Kalray MPPA (Multi-Purpose Processor ACM Reference Format: Array) family of single-chip many-core processors. We introduce Benoît Dupont de Dinechin. 2019. Consolidating High-Integrity, High- the third-generation MPPA processor, whose key features are mo- Performance, and Cyber-Security Functions on a Manycore Processor. In tivated by the high-performance and high-integrity functions of The 56th Annual Design Automation Conference 2019 (DAC ’19), June 2– automated vehicles. High-performance computing functions, rep- 6, 2019, Las Vegas, NV, USA. ACM, New York, NY, USA, 4 pages. https: resented by deep learning inference and by computer vision, need //doi.org/10.1145/3316781.3323473 to execute under soft real-time constraints. High-integrity func- tions are developed under model-based design, and must meet hard 1 INTRODUCTION real-time constraints. Finally, the third-generation MPPA processor Cyber-physical systems are characterized by software that interacts integrates a hardware root of trust, and its security architecture with the physical world, often with timing-sensitive safety-critical is able to support a security kernel for implementing the trusted physical sensing and actuation [10]. -

Chapter 4 Data-Level Parallelism in Vector, SIMD, and GPU Architectures
Computer Architecture A Quantitative Approach, Fifth Edition Chapter 4 Data-Level Parallelism in Vector, SIMD, and GPU Architectures Copyright © 2012, Elsevier Inc. All rights reserved. 1 Contents 1. SIMD architecture 2. Vector architectures optimizations: Multiple Lanes, Vector Length Registers, Vector Mask Registers, Memory Banks, Stride, Scatter-Gather, 3. Programming Vector Architectures 4. SIMD extensions for media apps 5. GPUs – Graphical Processing Units 6. Fermi architecture innovations 7. Examples of loop-level parallelism 8. Fallacies Copyright © 2012, Elsevier Inc. All rights reserved. 2 Classes of Computers Classes Flynn’s Taxonomy SISD - Single instruction stream, single data stream SIMD - Single instruction stream, multiple data streams New: SIMT – Single Instruction Multiple Threads (for GPUs) MISD - Multiple instruction streams, single data stream No commercial implementation MIMD - Multiple instruction streams, multiple data streams Tightly-coupled MIMD Loosely-coupled MIMD Copyright © 2012, Elsevier Inc. All rights reserved. 3 Introduction Advantages of SIMD architectures 1. Can exploit significant data-level parallelism for: 1. matrix-oriented scientific computing 2. media-oriented image and sound processors 2. More energy efficient than MIMD 1. Only needs to fetch one instruction per multiple data operations, rather than one instr. per data op. 2. Makes SIMD attractive for personal mobile devices 3. Allows programmers to continue thinking sequentially SIMD/MIMD comparison. Potential speedup for SIMD twice that from MIMID! x86 processors expect two additional cores per chip per year SIMD width to double every four years Copyright © 2012, Elsevier Inc. All rights reserved. 4 Introduction SIMD parallelism SIMD architectures A. Vector architectures B. SIMD extensions for mobile systems and multimedia applications C. -
Parallel Processing with the MPPA Manycore Processor
Parallel Processing with the MPPA Manycore Processor Kalray MPPA® Massively Parallel Processor Array Benoît Dupont de Dinechin, CTO 14 Novembre 2018 Outline Presentation Manycore Processors Manycore Programming Symmetric Parallel Models Untimed Dataflow Models Kalray MPPA® Hardware Kalray MPPA® Software Model-Based Programming Deep Learning Inference Conclusions Page 2 ©2018 – Kalray SA All Rights Reserved KALRAY IN A NUTSHELL We design processors 4 ~80 people at the heart of new offices Grenoble, Sophia (France), intelligent systems Silicon Valley (Los Altos, USA), ~70 engineers Yokohama (Japan) A unique technology, Financial and industrial shareholders result of 10 years of development Pengpai Page 3 ©2018 – Kalray SA All Rights Reserved KALRAY: PIONEER OF MANYCORE PROCESSORS #1 Scalable Computing Power #2 Data processing in real time Completion of dozens #3 of critical tasks in parallel #4 Low power consumption #5 Programmable / Open system #6 Security & Safety Page 4 ©2018 – Kalray SA All Rights Reserved OUTSOURCED PRODUCTION (A FABLESS BUSINESS MODEL) PARTNERSHIP WITH THE WORLD LEADER IN PROCESSOR MANUFACTURING Sub-contracted production Signed framework agreement with GUC, subsidiary of TSMC (world top-3 in semiconductor manufacturing) Limited investment No expansion costs Production on the basis of purchase orders Page 5 ©2018 – Kalray SA All Rights Reserved INTELLIGENT DATA CENTER : KEY COMPETITIVE ADVANTAGES First “NVMe-oF all-in-one” certified solution * 8x more powerful than the latest products announced by our competitors**