Chapter 3 HISTORY of ARTIFICIAL GRAVITY
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Galaktika Group: Orbital City «EFIR» «Ethereal Dwelling» Space Colony Concept by Tsiolkovsky
Galaktika group: Orbital city «EFIR» «ethereal dwelling» space colony concept by tsiolkovsky BASIC PRINCIPLES OF CONSTRUCTING A SPACE COLONY UPON THE CONCEPT BY K.E. TSIOLKOVSKY: IN-SPACE ASSEMBLING MANKIND WILL NOT FOREVER REMAIN ON EARTH, BUT IN THE PURSUIT OF LIGHT AND SPACE WILL FIRST USING MATERIALS FROM PLANETS AND ASTEROIDS TIMIDLY EMERGE FROM THE BOUNDS OF THE ATMOSPHERE, AND THEN ADVANCE UNTIL HE HAS CONQUERED THE WHOLE ARTIFICIAL GRAVITY OF CIRCUMSOLAR SPACE. PLANTS CULTIVATION HE PRESENTED HIS RESEARCHES IN THE BOOKS: BEYOND THE PLANET EARTH, BIOLOGICAL LIFE IN COSMOS, ETHEREAL ISLAND, ETC. COLONY CONCEPTS [SHORT] REVIEW BERNAL'S SPHERE, STANFORD TORUS, O’NEILL’S CYLINDER BERNAL’S SPHERE STANFORD TORUS O’NEILL’S CYLINDER JOHN DESMOND BERNAL 1929 POPULATION: STUDENTS OF THE STANFORD UNIVERSITY 1975 GERARD K. O'NEILL, 1979 POPULATION: 20 MLN. 20—30 THOUSAND INHABITANTS DIAMETER POPULATION: 10 THND. AND MORE INHABITANTS INHABITANTS DIAMETER OF CYLINDERS: 6.4 KM ABOUT 16 KM DIAMETER1.8KM AND MORE LENGTH OF CYLINDERS: 32 KM ORBITAL CITY «EFIR» scheme and characteristics TOP VIEW residential torus ASSEMBLY DOCK radiators electric power station elevator 10,000 INHABITANTS DIAMETER OF TORUS – 2 KILOMETRES variable gravity module MASS OF ORBITAL CITY – 25 MLN. TONS RESIDENTIAL AREA DESCRIPTION OF THE INTERIOR AREA RESIDENTIAL AREA CHARACTERISTICS DIAMETER OF TORUS - 2 KILOMETRES ROTATION PERIOD - ONE FULL-CIRCLE TURN PER 63 SECONDS RESIDENTIAL AREA WIDTH - 300 METERS RESIDENTIAL AREA HEIGHT - 150 METERS AREA OF RESIDENTIAL ZONE - 200 HA MAXIMUM POPULATION - 10-40 THOUSAND DESIGNED POPULATION DENSITY IS 50 PEOPLE/HA TO 200 PEOPLE/HA RESIDENTIAL AREA DESCRIPTION OF THE INTERIOR AREA LOGISTICS transport plans for passengers and cargoes ORBITAL CITY AT THE LAGRANGIAN POINT INTERPLANETARY 25 MLN. -

General Issue
Journal of the British Interplanetary Society VOLUME 72 NO.5 MAY 2019 General issue A REACTION DRIVE Powered by External Dynamic Pressure Jeffrey K. Greason DOCKING WITH ROTATING SPACE SYSTEMS Mark Hempsell MARTIAN DUST: the Formation, Composition, Toxicology, Astronaut Exposure Health Risks and Measures to Mitigate Exposure John Cain THE CONCEPT OF A LOW COST SPACE MISSION to Measure “Big G” Roger Longstaff www.bis-space.com ISSN 0007-084X PUBLICATION DATE: 26 JULY 2019 Submitting papers International Advisory Board to JBIS JBIS welcomes the submission of technical Rachel Armstrong, Newcastle University, UK papers for publication dealing with technical Peter Bainum, Howard University, USA reviews, research, technology and engineering in astronautics and related fields. Stephen Baxter, Science & Science Fiction Writer, UK James Benford, Microwave Sciences, California, USA Text should be: James Biggs, The University of Strathclyde, UK ■ As concise as the content allows – typically 5,000 to 6,000 words. Shorter papers (Technical Notes) Anu Bowman, Foundation for Enterprise Development, California, USA will also be considered; longer papers will only Gerald Cleaver, Baylor University, USA be considered in exceptional circumstances – for Charles Cockell, University of Edinburgh, UK example, in the case of a major subject review. Ian A. Crawford, Birkbeck College London, UK ■ Source references should be inserted in the text in square brackets – [1] – and then listed at the Adam Crowl, Icarus Interstellar, Australia end of the paper. Eric W. Davis, Institute for Advanced Studies at Austin, USA ■ Illustration references should be cited in Kathryn Denning, York University, Toronto, Canada numerical order in the text; those not cited in the Martyn Fogg, Probability Research Group, UK text risk omission. -

An Instrumented Centrifuge for Studying Mouse Locomotion and Behaviour Under Hypergravity Benjamin J
© 2019. Published by The Company of Biologists Ltd | Biology Open (2019) 8, bio043018. doi:10.1242/bio.043018 METHODS AND TECHNIQUES An instrumented centrifuge for studying mouse locomotion and behaviour under hypergravity Benjamin J. H. Smith* and James R. Usherwood ABSTRACT (Alexander, 1984). Investigating the limitations of inverted Gravity may influence multiple aspects of legged locomotion, from the pendulum models of locomotion may lead to advances in robotics periods of limbs moving as pendulums to the muscle forces required and treatment of gait pathologies, as well as our fundamental to support the body. We present a system for exposing mice to understanding of legged locomotion. hypergravity using a centrifuge and studying their locomotion and The motion of an inverted pendulum can be described using u€ ¼ g u u€ activity during exposure. Centrifuge-induced hypergravity has the the equation L sin , where is angular acceleration, g is θ advantages that it both allows animals to move freely, and it affects gravitational acceleration, L is length, and is angular displacement both body and limbs. The centrifuge can impose two levels of from the equilibrium point; testing the predictions of inverted hypergravity concurrently, using two sets of arms of different lengths, pendulum-based models therefore requires the manipulation of either each carrying a mouse cage outfitted with a force and speed L or g. Differences in L are usually studied by comparing similar measuring exercise wheel and an infrared high-speed camera; both animals of different sizes (Gatesy and Biewener, 1991; Daley and triggered automatically when a mouse begins running on the wheel. -

PHYSICS of ARTIFICIAL GRAVITY Angie Bukley1, William Paloski,2 and Gilles Clément1,3
Chapter 2 PHYSICS OF ARTIFICIAL GRAVITY Angie Bukley1, William Paloski,2 and Gilles Clément1,3 1 Ohio University, Athens, Ohio, USA 2 NASA Johnson Space Center, Houston, Texas, USA 3 Centre National de la Recherche Scientifique, Toulouse, France This chapter discusses potential technologies for achieving artificial gravity in a space vehicle. We begin with a series of definitions and a general description of the rotational dynamics behind the forces ultimately exerted on the human body during centrifugation, such as gravity level, gravity gradient, and Coriolis force. Human factors considerations and comfort limits associated with a rotating environment are then discussed. Finally, engineering options for designing space vehicles with artificial gravity are presented. Figure 2-01. Artist's concept of one of NASA early (1962) concepts for a manned space station with artificial gravity: a self- inflating 22-m-diameter rotating hexagon. Photo courtesy of NASA. 1 ARTIFICIAL GRAVITY: WHAT IS IT? 1.1 Definition Artificial gravity is defined in this book as the simulation of gravitational forces aboard a space vehicle in free fall (in orbit) or in transit to another planet. Throughout this book, the term artificial gravity is reserved for a spinning spacecraft or a centrifuge within the spacecraft such that a gravity-like force results. One should understand that artificial gravity is not gravity at all. Rather, it is an inertial force that is indistinguishable from normal gravity experience on Earth in terms of its action on any mass. A centrifugal force proportional to the mass that is being accelerated centripetally in a rotating device is experienced rather than a gravitational pull. -

Arthur C. Clarke Fred Körper, SFGH-Treffen 21.02.2009
SF-Klassiker: Arthur C. Clarke Fred Körper, SFGH-Treffen 21.02.2009 Sir Arthur Charles Clarke (* 16. Dezember 1917 in Minehead, Somerset, England; † 19. März 2008 in Colombo, Sri Lanka) war ein britischer Science-Fiction-Schriftsteller. Durch den Film 2001: Odyssee im Weltraum von Stanley Kubrick, der auf einer Kurzgeschichte Clarkes beruht und dessen Drehbuch Clarke gemeinsam mit Kubrick schrieb, wurde er auch außerhalb der Science-Fiction-Szene bekannt. Clarke gilt als Visionär neuer Technologien, die er außer in Science-Fiction-Romanen und Kurzgeschichten auch in wissenschaftlichen Artikeln beschrieb. 1 Leben 2 Werk 2.1 Romane 2.2 Erzählungen 2.3 Kurzgeschichtensammlungen 2.4 Gemeinschaftswerke 2.5 Autobiografisches 3 Verfilmungen (Auswahl) 4 Clarke'sche Gesetze Leben Arthur Charles Clarke wurde am 16.Dezember 1917 in der Grafschaft Somerset im Südwesten Englands geboren. Von 1927 bis 1936 besuchte er die Huish's Grammar School in Taunton/Somerset und las bereits als Jugendlicher die Werke von H. G. Wells und Olaf Stapledon. Da Clarke aus finanziellen Gründen ein Studium zunächst verwehr blieb, ging er 1936 nach London und arbeitete dort zunächst im Staatsdienst. 1941 trat er als Radaroffizier in die Royal Air Force ein. Diese Erfahrungen liegen dem Roman Glide Path zugrunde. Seine Idee, geostationäre Satelliten zur technischen Kommunikation zu nutzen, die er 1945 unter dem Titel Extra-terrestrial Relays – Can Rocket Stations Give World- wide Radio Coverage? in der wissenschaftlichen Zeitschrift Wireless World veröffentlichte, erlebte 1964 mit dem Saetelliten Syncom 3 ihre Verwirklichung. Ihm zu Ehren wird daher der geostationäre Orbit auch „Clarke Belt“ beziehungsweise „Clarke Orbit“ genannt. Von 1946 bis 1948 studierte er Mathematik und Physik am Londoner King's College. -

Continuous-Flow Centrifugation to Collect Suspended Sediment for Chemical Analysis
1 Table 6. Compounds detected in both equipment blank samples and not in corresponding source blank samples or at concentrations greater than two times the corresponding source blank sample concentration. Prepared in cooperation with the National Water Quality Monitoring Council and [Source data: Appendix A, table A1; Conn and Black (2014, table A4); and Conn and others (2015, table A11). CAS Registry Number: Chemical Abstracts Service Washington State Department of(CAS) Ecology Registry Number® (RN) is a registered trademark of the American Chemical Society. CAS recommends the verifi cation of CASRNs through CAS Client ServicesSM. Method: EPA, U.S. Environmental Protection Agency’s SW 846; SIM, select ion monitoring. Unit: µg/kg, microgram per kilogram; ng/kg, nanogram per kilogram. Sample type: River samples were from the Puyallup River, Washington. Q, qualifi er (blank cells indicate an unqualifi ed detection). J, estimated, result between the Continuous-Flow Centrifugationdetection level and reporting level; toNJ, result Collect did not meet all quantitation Suspended criteria (an estimated maxiumum possible concentration is reported in Result column) U, not detected above the reporting level (reported in the Result column); UJ, not detected above the detection level (reported in the Result column). Abbreviations: na, not Sediment for Chemicalapplicable; Analysis PCBs, polychlorinated biphenyls] Sample type Chapter 6 of CAS River River Commercial Commercial Section D, Water Quality Parameter name Registry Method Unit source equipment -

Gas Centrifuge Technology: Proliferation Concerns and International Safeguards Brian D
Gas Centrifuge Technology: Proliferation Concerns and International Safeguards Brian D. Boyer Los Alamos National Laboratory Trinity Section American Nuclear Society Santa Fe, NM November 7, 2014 Acknowledgment to M. Rosenthal (BNL), J.M. Whitaker (ORNL), H. Wood (UVA), O. Heinonen (Harvard Belfer School), B. Bush (IAEA-Ret.), C. Bathke (LANL) for sources of ideas, information, and knowledge UNCLASSIFIED Operated by Los Alamos National Security, LLC for the U.S. Department of Energy's NNSA Enrichment / Proliferation / Safeguards . Enrichment technology – The centrifuge story . Proliferation of technology – Global Networks . IAEA Safeguards – The NPT Bargain Enrichment Proliferation Safeguards U.S. DOE Centrifuges – DOE / Pres. George W. Bush at ORNL B. Boyer and K. Akilimali - IAEA Zippe Centrifuge – Deutsches Museum (Munich) briefed on seized Libyan nuclear Safeguards Verifying Spent Fuel in www.deutsches-museum.de/en/exhibitions/energy/energy-technology/nuclear-energy/ equipment (ORNL) Training in Sweden (Ski-1999) UNCLASSIFIED 2 Operated by Los Alamos National Security, LLC for the U.S. Department of Energy's NNSA The Nuclear Fuel Cycle and Proliferation Paths to WMDs IAEA Safeguards On URANIUM Path Weapon Assembly Convert UF6 to U Metal Pre-Safeguards Natural Enriched DIVERSION Material (INFCIRC/153) Uranium Uranium PATH “Open” Cycle WEAPONS PATHS Fuel – Natural Uranium or LEU In closed cycle – MOX Fuel (U and Pu) “Closed” Cycle IAEA Safeguards On PLUTONIUM Path Convert Pu Plutonium Compounds to Pu Metal DIVERSION PATH To Repository -

California State University, Northridge Low Earth Orbit
CALIFORNIA STATE UNIVERSITY, NORTHRIDGE LOW EARTH ORBIT BUSINESS CENTER A Project submitted in partial satisfaction of the requirements for the degree of Master of Science in Engineering by Dallas Gene Bienhoff May 1985 The Proj'ectof Dallas Gene Bienhoff is approved: Dr. B. J. Bluth Professor T1mothy Wm. Fox - Chair California State University, Northridge ii iii ACKNOWLEDGEHENTS I wish to express my gratitude to those who have helped me over the years to complete this thesis by providing encouragement, prodding and understanding: my advisor, Tim Fox, Chair of Mechanical and Chemical Engineering; Dr. B. J. Bluth for her excellent comments on human factors; Dr. B. J. Campbell for improving the clarity; Richard Swaim, design engineer at Rocketdyne Division of Rockwell International for providing excellent engineering drawings of LEOBC; Mike Morrow, of the Advanced Engineering Department at Rockwell International who provided the Low Earth Orbit Business Center panel figures; Bob Bovill, a commercial artist, who did all the artistic drawings because of his interest in space commercialization; Linda Martin for her word processing skills; my wife, Yolanda, for egging me on without nagging; and finally Erik and Danielle for putting up with the excuse, "I have to v10rk on my paper," for too many years. iv 0 ' PREFACE The Low Earth Orbit Business Center (LEOBC) was initially conceived as a modular structure to be launched aboard the Space Shuttle, it evolved to its present configuration as a result of research, discussions and the desire to increase the efficiency of space utilization. Although the idea of placing space stations into Earth orbit is not new, as is discussed in the first chapter, and the configuration offers nothing new, LEOBC is unique in its application. -

Basics in Centrifugation - Eppendorf Handling Solutions Page 1 of 5
Basics in Centrifugation - Eppendorf Handling Solutions Page 1 of 5 Menu • Home • Sample Handling • Centrifugation • Safe Use of Centrifuges • Basics in Centrifugation Basics in Centrifugation • Biosafety • Safe Use of Centrifuges • Centrifugation Applications • This and That • Braking Ramps • Thermal Conductivity • Centrifuge Maintenance • Ergonomics • share • tweet • share • mail Basics in Centrifugation Centrifugation is a technique that helps to separate mixtures by applying centrifugal force. A centrifuge is a device, generally driven by an electric motor, that puts an object, e.g., a rotor, in a rotational movement around a fixed axis. A centrifuge works by using the principle of sedimentation: Under the influence of gravitational force (g-force), substances separate according to their density. Different types of separation are known, including isopycnic, ultrafiltration, density gradient, phase separation, and pelleting. https://handling-solutions.eppendorf.com/sample-handling/centrifugation/safe-use-of-cent... 10/24/2018 Basics in Centrifugation - Eppendorf Handling Solutions Page 2 of 5 Pelleting is the most common application for centrifuges. Here, particles are concentrated as a pellet at the bottom of the centrifuge tube and separated from the remaining solution, called supernatant. During phase separation, chemicals are converted from a matrix or an aqueous medium to a solvent (for additional chemical or molecular biological analysis). In ultrafiltration, macromolecules are purified, separated, and concentrated by using a membrane. Isopycnic centrifugation is carried out using a "self- generating" density gradient established through equilibrium sedimentation. This method concentrates the analysis matches with those of the surrounding solution. Protocols for centrifugation typically specify the relative centrifugal force (rcf) and the degree of acceleration in multiples of g (g-force). -
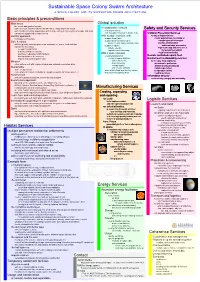
Sustainable Space Colony Swarm Architecture
Sustainable Space Colony Swarm Architecture A SPACE COLONY AND ITS SUPPORTING SWARM ARCHITECTURE Basic principles & preconditions Main focus Global solution the needs and goals of people sufficient room and the natural habitat that our body and mind needs A collaborative network Safety and Security Services with a sufficiently large population, with a large variety in ages, types of people and skills of a space colony extensively supported on many levels and its supporting swarm architecture Collision Prevention Services Holistic approach With multiple habitats, with for object impact defense, multi-layer architecture support from Earth mostly autonomous, consisting of Safe & robust support from celestial bodies: multiple types of telescopes Moon, Venus, Mars and Asteroids distributed information artificial gravity, radiation protection, atmosphere, water, food and light support in space: and knowledge processing robustness by default: safety, energy, flight vector adjustment services, compartmentalization, logistics, manufacturing by autonomous unit(s) distributed implementation, cloud overblow facility multilayer redundancy with fallback, With a space armada backup facilities & resources at Lagrangian points: Remote controlled repairs fleet impact and collision prevention clouds of space stations, Environment sustainability services with settlements, Mindset for humans, flora and fauna manufacturing, either safe or not, with regular internal and external evacuation drills air and water purification energy supply artificial gravity provisioning -

Visions of the Universe: Four Centuries of Discovery One-Hour
Visions of the Universe: Four Centuries of Discovery One-Hour Exhibit Tour / Program “Visions of the Universe: Four Centuries of Discovery” was produced in December 2008 by the Space Telescope Science Institute, the American Library Association, and the Smithsonian Astrophysical Observatory, through funding from the National Aeronautics and Space Administration. Some guidelines from NGS standards 2nd – 4th grade: Science and Engineering Practices - Constructing Explanations and Designing Solutions - Constructing explanations and designing solutions in K–2 builds on prior experiences and progresses to the use of evidence and ideas in constructing evidence-based accounts of natural phenomena and designing solutions. - Make observations from several sources to construct an evidence-based account for natural phenomena. Disciplinary Core Ideas The History of Planet Earth – Some events happen very quickly; others occur very slowly, over a time period much longer than one can observe. Crosscutting Concepts Stability and Change – Things may change slowly or rapidly. In this program, the educator will guide a group through the “Visions of the Universe” exhibit, which consists of 12 panels mounted on foam board. Reading the text of each poster, and showing the depictions of space objects, exploration and achievements, the educator will present a big-picture view of the history of astronomy. At certain points, depending on time and group, you may connect the concepts of a given poster to one of the suggested “Earth and Space” activities. Refer to the supplemental materials in the “Visions of the Universe” binder for the background knowledge you will need to answer any questions that may come up! I. Visions of the Universe Intro “Telescopes have transformed not only our views of the universe, but also our understanding of the planets, stars, and galaxies within it.” After reading the poster, pause to let kids look through one of our Galileoscopes. -
Ground Into Sky: the Topology of Interstellar
The Avery Review Fred scharmen – Ground into Sky: The Topology of Interstellar Christopher Nolan’s Interstellar was nominated for five Oscars. The Citation: Fred Scharmen, “Ground Into Sky: The Topology of Interstellar,” in The Avery Review, no. 6 movie won the Oscar for Best Visual Effects, many of which were created with (March 2015), http://averyreview.com/issues/6/ analog camera techniques. It has been controversial for its use of emotional ground-into-sky. themes, and its scientific accuracy. The physics in the film is either shockingly sloppy, or accurate enough to generate new peer-reviewed research, depend- ing on which review you read. [1] [2] But the best and most curious thing about [1] Phil Plait, “Interstellar Science: What the movie gets wrong and really wrong about black Interstellar is its topology. holes, relativity, plot, and dialogue,” Slate, http:// Again and again, in different ways, we see the ground lifting up to www.slate.com/articles/health_and_science/ space_20/2014/11/interstellar_science_review_ become the sky. The first appearance of this effect is early in the movie—the the_movie_s_black_holes_wormholes_relativity.html, horizon-obliterating dust storms that sweep across the American Midwest. accessed February 24, 2015. Cooper (the main character) and his family are at a baseball game when a dust [2]: Adam Rogers, “Wrinkles in Spacetime: The Warped Astrophysics of Interstellar,” Wired, http:// storm rises, looming like a growing mountain. Drought and blight have killed the www.wired.com/2014/10/astrophysics-interstellar- plant life that binds the soil, the near-future world of the movie has become a black-hole/, accessed February 24, 2015.