Preliminary Infrastructure Development for Altair Sortie Operations
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

LCROSS (Lunar Crater Observation and Sensing Satellite) Observation Campaign: Strategies, Implementation, and Lessons Learned
Space Sci Rev DOI 10.1007/s11214-011-9759-y LCROSS (Lunar Crater Observation and Sensing Satellite) Observation Campaign: Strategies, Implementation, and Lessons Learned Jennifer L. Heldmann · Anthony Colaprete · Diane H. Wooden · Robert F. Ackermann · David D. Acton · Peter R. Backus · Vanessa Bailey · Jesse G. Ball · William C. Barott · Samantha K. Blair · Marc W. Buie · Shawn Callahan · Nancy J. Chanover · Young-Jun Choi · Al Conrad · Dolores M. Coulson · Kirk B. Crawford · Russell DeHart · Imke de Pater · Michael Disanti · James R. Forster · Reiko Furusho · Tetsuharu Fuse · Tom Geballe · J. Duane Gibson · David Goldstein · Stephen A. Gregory · David J. Gutierrez · Ryan T. Hamilton · Taiga Hamura · David E. Harker · Gerry R. Harp · Junichi Haruyama · Morag Hastie · Yutaka Hayano · Phillip Hinz · Peng K. Hong · Steven P. James · Toshihiko Kadono · Hideyo Kawakita · Michael S. Kelley · Daryl L. Kim · Kosuke Kurosawa · Duk-Hang Lee · Michael Long · Paul G. Lucey · Keith Marach · Anthony C. Matulonis · Richard M. McDermid · Russet McMillan · Charles Miller · Hong-Kyu Moon · Ryosuke Nakamura · Hirotomo Noda · Natsuko Okamura · Lawrence Ong · Dallan Porter · Jeffery J. Puschell · John T. Rayner · J. Jedadiah Rembold · Katherine C. Roth · Richard J. Rudy · Ray W. Russell · Eileen V. Ryan · William H. Ryan · Tomohiko Sekiguchi · Yasuhito Sekine · Mark A. Skinner · Mitsuru Sôma · Andrew W. Stephens · Alex Storrs · Robert M. Suggs · Seiji Sugita · Eon-Chang Sung · Naruhisa Takatoh · Jill C. Tarter · Scott M. Taylor · Hiroshi Terada · Chadwick J. Trujillo · Vidhya Vaitheeswaran · Faith Vilas · Brian D. Walls · Jun-ihi Watanabe · William J. Welch · Charles E. Woodward · Hong-Suh Yim · Eliot F. Young Received: 9 October 2010 / Accepted: 8 February 2011 © The Author(s) 2011. -

Constellation Program Overview
Constellation Program Overview October 2008 hris Culbert anager, Lunar Surface Systems Project Office ASA/Johnson Space Center Constellation Program EarthEarth DepartureDeparture OrionOrion -- StageStage CrewCrew ExplorationExploration VehicleVehicle AresAres VV -- HeavyHeavy LiftLift LaunchLaunch VehicleVehicle AltairAltair LunarLunar LanderLander AresAres II -- CrewCrew LaunchLaunch VehicleVehicle Lunar Capabilities Concept Review EstablishedEstablished Lunar Lunar Transportation Transportation EstablishEstablish Lunar Lunar Surface SurfaceArchitecturesArchitectures ArchitectureArchitecture Point Point of of Departure: Departure: StrategiesStrategies which: which: Satisfy NASA NGO’s to acceptable degree ProvidesProvides crew crew & & cargo cargo delivery delivery to to & & from from the the Satisfy NASA NGO’s to acceptable degree within acceptable schedule moonmoon within acceptable schedule Are consistent with capacity and capabilities ProvidesProvides capacity capacity and and ca capabilitiespabilities consistent consistent Are consistent with capacity and capabilities withwith candidate candidate surface surface architectures architectures ofof the the transportation transportation systems systems ProvidesProvides sufficient sufficient performance performance margins margins IncludeInclude set set of of options options fo for rvarious various prioritizations prioritizations of cost, schedule & risk RemainsRemains within within programmatic programmatic constraints constraints of cost, schedule & risk ResultsResults in in acceptable -

Go for Lunar Landing Conference Report
CONFERENCE REPORT Sponsored by: REPORT OF THE GO FOR LUNAR LANDING: FROM TERMINAL DESCENT TO TOUCHDOWN CONFERENCE March 4-5, 2008 Fiesta Inn, Tempe, AZ Sponsors: Arizona State University Lunar and Planetary Institute University of Arizona Report Editors: William Gregory Wayne Ottinger Mark Robinson Harrison Schmitt Samuel J. Lawrence, Executive Editor Organizing Committee: William Gregory, Co-Chair, Honeywell International Wayne Ottinger, Co-Chair, NASA and Bell Aerosystems, retired Roberto Fufaro, University of Arizona Kip Hodges, Arizona State University Samuel J. Lawrence, Arizona State University Wendell Mendell, NASA Lyndon B. Johnson Space Center Clive Neal, University of Notre Dame Charles Oman, Massachusetts Institute of Technology James Rice, Arizona State University Mark Robinson, Arizona State University Cindy Ryan, Arizona State University Harrison H. Schmitt, NASA, retired Rick Shangraw, Arizona State University Camelia Skiba, Arizona State University Nicolé A. Staab, Arizona State University i Table of Contents EXECUTIVE SUMMARY..................................................................................................1 INTRODUCTION...............................................................................................................2 Notes...............................................................................................................................3 THE APOLLO EXPERIENCE............................................................................................4 Panelists...........................................................................................................................4 -

Volume 3, Number 3, November 2014
THE STAR THE NEWSLETTER OF THE MOUNT CUBA ASTRONOMICAL GROUP VOL. 3 NUM. 3 CONTACT US AT DAVE GROSKI [email protected] OR HANK BOUCHELLE [email protected] 302-983-7830 OUR PROGRAMS ARE HELD THE SECOND TUESDAY OF EACH MONTH AT 7:30 P.M. UNLESS INDICATED OTHERWISE MOUNT CUBA ASTRONOMICAL OBSERVATORY 1610 HILLSIDE MILL ROAD GREENVILLE DE. FOR DIRECTIONS PLEASE VISIT www.mountcuba.org PLEASE SEND ALL PHOTOS AND ARTICLES TO [email protected] 1 NOVEMBER MEETING TUESDAY THE 11TH 7:30 p.m. OCTOBER MEETING REVIEW: Dave Groski gave a presentation on the Spilhaus Space Clock. This is such an interesting devise that I shall cover it in more detail under the Points of Interest section of the STAR. Dr. Hank Bouchelle once again gave a truly informative talk on not one but several topics related to Astronomy and Physics in general. Since he covered such a varied group of topics, I shall also cover them in the Points of Interest section. Phenomena: Knock! Knock! Is Anyone home? Hank Bouchelle Cinematic depictions of the events accompanying an alien visit are almost uniformly dire. Alien intentions are almost always destructive, deadly, or intended to enslave. They destroy entire populations, and unleash weapons that easily turn Earth to dust. Reports of personal interactions with aliens frequently relate queasy adventures in proctology. It is a bit strange, then, that many people, especially among the scientific community, spare no effort or cost to detect alien messages or the electronic fingerprint of signals that are not produced by the nature. -

Dream Center for Lunar Science: a Three Year Summary Report
Annual Meeting of the Lunar Exploration Analysis Group (2012) 3027.pdf DREAM CENTER FOR LUNAR SCIENCE: A THREE YEAR SUMMARY REPORT. W. M. Farrell1,3, R. M. Killen1,3, and G. T. Delory2,3, 1Solar System Exploration Division, NASA/Goddard Space Flight Center, Greenbelt, MD, 2Space Science Laboratory, University of California, Berkeley, CA, 3NASA’s Lunar Science Institute, NASA/Ames Research Center, Moffett Field, CA. Abstract. In early 2009, the Dynamic Response of the Environment At the Moon (DREAM) lunar sci- ence center became a supporting team of NASA's Lu- nar Science Institute specifically to study the solar- lunar connection and understand the response of the lunar plasma, exosphere, dust, and near-surface envi- ronments to solar variations. DREAM especially em- phasizes the effect extreme events like solar storms and impacts have on the plasma-surface-gas dynamical system. One of the center's hallmark contribution is the solar storm/lunar atmosphere modeling (SSLAM) study that cross-integrated a large number of the cen- The Solar-Lunar Connection studies by DREAM. Solar ener- ter's models to determine the effect a strong solar storm gy and matter stimulate the lunar surface, resulting in an exo- has at the Moon. The results from this intramural event sphere, exo-ionosphere, lifted dust, and plasma flow layers. will be described herein. A number of other key studies were performed, including a unique ground-based observation of the LCROSS impact-generated sodium plume, exo- atmosphere modeling studies, and focused studies on the formation and distribution of lunar water. The team is supporting ARTEMIS lunar plasma interaction stud- ies via modeling/data validation efforts, especially ex- amining ion reflection from magnetic anomalies and pick-up ions from the Moon. -

ART and ECLIPSES Established in History with Customs and Norms
Volume 6, Issue 4 SOLAR ECLIPSE NEWSLETTER Page 23 ART AND ECLIPSES established in history with customs and norms. These Andean Indians also had established a great deal of accuracy in solar observations and calculations. But the question still remains, did isolated indians have a way to know what time this eclipse would start? Did they, in- stead keep a fire burning all day? (unlikely at this altitude to keep gasoline burning all day) If they did know when... then how? Jen Winter From: Michel-André Levy Do you really think that a logical behaviour, when an eclipse is announced, is to light fires ? I don't think any of the list members ever did so during an eclipse. There are various reasons for keeping a fire burning during the day. In the alti- plano, I suppose it can be cold. Or may be they wanted to cook something.... So, I would not say that the fires were "obviously" lit because of the eclipse. Michel-Andre LEVY From: Vic & Jen Winter, ICSTARS Inc. > I don't think any of the list members ever did so during an eclipse. ....by the Indians. From: Glenn Schneider <[email protected]> The Aymara Indians also In 1981 I observed the TSE from a site near Bratsk, Siberia, along with hundreds oif other non-Soviets (this was back in the days of the USSR), selected by a local/governmental coordinating and organizing traditionally told committe). They thoughtfully were going to provide a post-eclipse lunch at the site. To do so they erected not to look at some rather large open-fire grills, and during ingress partial phase began to cook mounds of shasliks the eclipse. -

Lunar Exploration Efforts
Module 3 – Nautical Science Unit 4 – Astronomy Chapter 13 - The Moon Section 1 – The Moon What You Will Learn to Do Demonstrate understanding of astronomy and how it pertains to our solar system and its related bodies: Moon, Sun, stars and planets Objectives 1. Recognize basic facts about the Moon such as size, distance from Earth and atmosphere 2. Describe the geographical structure of the Moon 3. Describe the surface features of the Moon 4. Explain those theories that describe Moon craters and their formations Objectives 5. Describe the mountain ranges and riles on the surface of the Moon 6. Explain the effect moonquakes have on the Moon 7. Describe how the Moon’s motion causes its phases 8. Explain the basic reasons for Moon exploration Key Terms CPS Key Term Questions 1 - 12 Key Terms Maria - Mare or Maria (plural); Any of the several dark plains on the Moon and Mars; Latin word for “Sea” Reflectance - The ratio of the intensity of reflected radiation to that of the radiation that initially hits the surface. Key Terms Impact Crater - The cup shaped depression or cavity on the surface of the Earth or other heavenly bodies. Breccia - Rock composed of angular fragments of older rocks melded together as a result of a meteor impact. Regolith - The layer of disintegrated rock fragments (dust), just above the solid rock of the Moon’s crust. Key Terms Rilles - Cracks in the lunar surface similar to shallow, meandering river beds on the Earth. Phases The Moon’s motion in its orbit (of the Moon) - causes its phases (progressive changes in the visible portion of the Moon). -

Public Scan.Pdf
Space Communications and Navigation (SCaN) Program Commercial & International Lunar Communications and Navigation Studies Calvin Ramos (for Jim Schier) 13 May 2008 DRAFT SCaN Interface with Customers/Missions Space Communications & Navigation - Not Just Important, It's Vital 2 State of “Commercial” in SCaN • Space Network (SN)/Tracking & Data Relay Satellite System (TDRSS) is & will remain Government Owned/Government Operated (GOGO) • Deep Space Network (DSN) is GOGO; contains significant unique technology not in industry; no market beyond NASA – Not a good candidate for commercialization • Ground Network (GN) is ~1/3 GOGO & 2/3 Contractor Owned & Operated (COCO) in transition to 90% COCO • NASA Integrated Services Network (NISN) runs entirely on AT&T • Lunar Network (LN) conceived to support Science & Exploration missions – Subject of new commercial and international study Space Communications & Navigation - Not Just Important, It's Vital 3 Science & Exploration Drivers • SMD - ILN of 6-12 surface stations • ILN Kickoff (12 March 2008) - open to participation by all national space agencies • Initial lunar surface stations in the geophysical network may launch as early as 2011 (UK) or 2013 (US) Space Communications & Navigation - Not Just Important, It's Vital 4 Science & Exploration Drivers • ESMD Studies to date have treated Communication & Navigation (C&N) as if entirely provided by NASA – Lunar Architecture Team Phase 1 & 2 (2006-2007) – Constellation Architecture Team Lunar Surface Systems (CxAT LSS) (2008) • Initial Altair lunar -
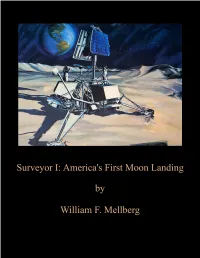
Surveyor 1 Space- Craft on June 2, 1966 As Seen by the Narrow Angle Camera of the Lunar Re- Connaissance Orbiter Taken on July 17, 2009 (Also See Fig
i “Project Surveyor, in particular, removed any doubt that it was possible for Americans to land on the Moon and explore its surface.” — Harrison H. Schmitt, Apollo 17 Scientist-Astronaut ii Frontispiece: Landing site of the Surveyor 1 space- craft on June 2, 1966 as seen by the narrow angle camera of the Lunar Re- connaissance Orbiter taken on July 17, 2009 (also see Fig. 13). The white square in the upper photo outlines the area of the enlarged view below. The spacecraft is ca. 3.3 m tall and is casting a 15 m shadow to the East. (NASA/LROC/ ASU/GSFC photos) iii iv Surveyor I: America’s First Moon Landing by William F. Mellberg v © 2014, 2015 William F. Mellberg vi About the author: William Mellberg was a marketing and public relations representative with Fokker Aircraft. He is also an aerospace historian, having published many articles on both the development of airplanes and space vehicles in various magazines. He is the author of Famous Airliners and Moon Missions. He also serves as co-Editor of Harrison H. Schmitt’s website: http://americasuncommonsense.com Acknowledgments: The support and recollections of Frank Mellberg, Harrison Schmitt, Justin Rennilson, Alexander Gurshstein, Paul Spudis, Ronald Wells, Colin Mackellar and Dwight Steven- Boniecki is gratefully acknowledged. vii Surveyor I: America’s First Moon Landing by William F. Mellberg A Journey of 250,000 Miles . December 14, 2013. China’s Chang’e 3 spacecraft successfully touched down on the Moon at 1311 GMT (2111 Beijing Time). The landing site was in Mare Imbrium, the Sea of Rains, about 25 miles (40 km) south of the small crater, Laplace F, and roughly 100 miles (160 km) east of its original target in Sinus Iridum, the Bay of Rainbows. -

N93-13593 Lunar Optical Telescopes: an Historical Perspective
N93-13593 LUNAR OPTICAL TELESCOPES: AN HISTORICAL PERSPECTIVE Stewart W. Johnson BDM International, Inc. 1801 Randolph Road, S.E. Albuquerque, NM 87106 Abstract There is a long history of thought and discussion on the possibilities of astronomical observatories on the Moon. Numerous ideas have been suggested and a variety of concepts have resulted for lunar optical telescopes. This paper reviews some of the ideas and efforts of individuals and working groups including Hershel, Clarke, Malina, Herbig, and Hess; working groups of the 1960s; and recent initiatives of Burke, Burns, and others. The enhanced technologies of the 1980s and 1990s can make past dreams of lunar observatories come to reality in the 21st century. That an astronomical observatory on the Moon offers the potential advantages of emplacement on a stable platform in an environment unencumbered by atmospheric obscurations has long been recognized. The National Academy of Sciences report, Astronomy and Astroohvsics for the 1980s, listed seven promising programs for the 1990s and beyond. All of these programs involved space-based observations and one of the programs was entitled Astronomical Observations on the Moon. The report states: The Moon offers certain decisive advantages as a base for astronomical observations. In particular the far side of the Moon provides protection from the radio interference from sources on or near Earth and therefore has great potential for radio astronomy. Shielded at all times from earthlight, sites on the far side of the Moon are also shielded from sunlight for substantial portions of each month and thus offer advantages for optical and infrared observations requiring the darkest possible sky. -

Project Alshain: a Lunar Flying Vehicle for Rapid Universal Surface Access
Project Alshain: A Lunar Flying Vehicle for Rapid Universal Surface Access University of Maryland, College Park ENAE484: Space Systems Design Faculty Advisors Dr. David Akin Dr. Mary Bowden Student Team Sarah Beal* Alex Janas* Zachary Neumann Theodor Talvac Nicholas D'Amore* Adam Kirk Nathaniel Niles Andrew Turner Pratik Dave Matthew Kosmer Joseph Park Neil Vasilak Amirhadi Ekrami Ryan Lebois Kush Patel Scott Weinberg Edwin Fernandes Arber Masati Fazle Siddique Andrew Wilson Adam Halperin* Andrew McLaren Michael Sotak Jarred Young Bryan Han Breanne McNerney* Nitin Sydney* Jolyon Zook * Student leads Submission Date: 5/25/2009 Introduction Since the Apollo program, the United States has foregone going to the Moon in order to focus on other space applications. However, with the advent of the Constellation Program, NASA plans a triumphant manned return to the moon, and the establishment of a permanent lunar base near the south pole. One goal of the base is to further exploration and research of the lunar surface. With the installation of a permanent outpost, a transportation infrastructure must be developed in order to efficiently travel, research, and explore the Moon’s surface. Since a permanent outpost has never been developed, one can use the Antarctic base infrastructure as an analogue to what means of transportation must be made available in such an uninhabitable, unexplored environment. For example, in Antarctica, scientists have the means to travel short distances between buildings and around the base using snowmobiles, and the ability to conduct longer research missions using closed cabin vehicles. The use of helicopters and aircraft enables unsurpassed range and speed for long distance missions. -

ALTAIR: Millennium's DARPA Seeme Satellite Solution Technical (R
SSC14-III-2 ALTAIR™ : Millennium’s DARPA SeeMe Satellite Solution Technical (R)evolution Michael Scardera, Matt Baker, Reid Reynolds, Shalini Reddy, Kevin Kellogg, Michael Mahoney, Paul Silversmith, Natalie Rodriguez, Peter Dohm Millennium Space Systems 2265 E. El Segundo Blvd. El Segundo, CA 90245; (310) 683-5853 [email protected] ABSTRACT Millennium Space Systems ALTAIR™ “27U” satellite developed under DARPA’s SeeMe (Space Enabled Effects for Military Engagements) program represents a game-changing spacecraft class addressing military, civil, and commercial needs, balancing extreme affordability, performance, and schedule responsiveness. DARPA’s overarching requirement called for a 24-spacecraft constellation, with satellites flying in any orbit, at less than $500K cost each, and with readiness to launch 90 days after call-up. This paper discusses the design process and lessons learned during high-altitude balloon tests and full engineering-model spacecraft development to achieve both high performance and low cost. We describe the driving spacecraft innovations to successfully achieve DARPA’s requirements. Innovations include payload performance, 3-D printed structure, GN&C/ACS Suite performance, communications system approach, Flight Software Implementation, Commercial-Off-The-Shelf (COTS) part usage, development & production approaches, and enabling constellation technologies. The views expressed in this paper are those of the authors and do not reflect the official policy or position of the Department of Defense or the U.S. Government. Distribution Statement "A" (Approved for Public Release, Distribution Unlimited). INTRODUCTION the spacecraft can fly in any orbit including high LEO, Millennium’s ALTAIR™ satellite implements a low- MEO, and GEO cost, high-performance vision for spacecraft design, manufacture, launch, and operations.