Flexible Aircraft Modelling for Flight Loads Analysis of Wake Vortex Encounters
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
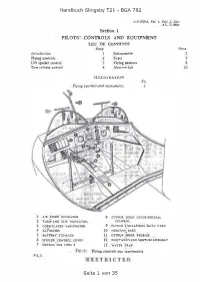
'. F1yin'g Controls I\ O '; Ments
Handbuch Slingsby T21 - BGA 782 A.P.4309A, VaCI, Par/.r, SUI, A.L,7,,'May Section·. 1 PILOTS.'.... CONTROLS AND' EQUIPMENT LIs"�' 'OF CONTENTS' Po;o, Para Introduction I ,Instrument!l' 5, Flying' controls, i Seats 7 harness Lift spoiler c:o�trol '3 Flying 9 Tow release control 4 Horizntt,'ba;' 10 TLLUsntATlUN Ft, F/ying cont'o/s 'and instruments 1 A'H\ INDICATOR ] SPEEO' 8 OTTFUR. HOOK OUJCX-R�teAsl! T'UR�N:'ANO I�DleATOR" CONTROL '2 'SLIP' eOBn-sLATER; VAR10'ME'l'ER', ,FLYING iiMlTATfONS"DAl'A-'CARD ,3 . ' 9 4 ALn"fl;' T!!R 10' HOR,zoN DAR.s· ;'. BAi",1Uti:�STOWAG1:!. OTTPUR HOOK. RBLBA52 5 - if ..... ..< ·CONTROL PILOT HeAD ANO URl 6 sPot'CEi.... LeVE�' 12 VENT ASSeMBLY �FOR :,VO:T2R ,7 SWITCH fTl!.\' 2 13 TRAP F1yin'g controls I\�O ';�ments P.S.II . Seite 1 von 35 Handbuch Slingsby T21 - BGA 782 . r J 't!o'duct1oli ��el? ts.rs b,��,Iij, ip. �.fi g;\ 1f.� -;:T, be;:tu rn�a n d:s} I P t.Jt·'C· ···. .'",., · · �is' . t to · a. :11��JCato�IS ,?pcrated �lectncaUy, tbe' power �l ;J�.:rhiS�s7ct!On i.n end:�d:· .�ser,,:e::.a3 se era location of all cocKpit ;bbLDg 8upphed ....by;dry.;batteries stowed in a : n l gUlde,to,tbe si�� � co'ri (fO\S a":d inst��rp en�l.:.. �<?g�th.e�: wH,h ,.tbe �o�ke�,o9�t��:;p�rt, ,of the' inst��ment , 'panel; co�t oned, " switch;" osIt rone � melhod of.operatlcg the controls where' this It,lS r bya p d . -

Riding and Handling Qualities of Light Aircraft
NASACONTRACTOR REPORT N COPY: RETURN YO AFWL (DOUL) KBWTEAND AFB, N. MI. RIDINGAND HANDLING QUALITIESOF LIGHT AIRCRAFT - A REVIEW AND ANALYSIS by Frederick 0. Smetum, Delbert C. Summey, und W. Dondld Johnson Prepared by C AR O LINA STATE UNIVERSITYNORTH STATE CAROLINA ,, Raleigh, N. C. 27607 for LalzgleyResearch Center NATIONALAERONAUTICS AND SPACE ADMINISTRATION WASHINGTON,D. C. MARCH 1972 TECH LIBRARY KAFB, NM 1. Report No. AccessionGovernment 2. No. 3. Recipient's Catalog No. - NASA CR - 1975 4. Title and7 5. Report Date RIDING AND HANDLING QUALIII?ES OF LIGHT AIRCRAFT - A REVIEW March 1972 AND ANALYSIS "- 7. Author(s1 Organization 0. Performing Report No. Frederick 0. Eknetana, Delbert C. flunmey, andW. Donald Johnson None 10.Work Unit No. 9. MamingOrganization Name and Address 736-05-10-01-00 North Carolina State University at Raleigh Department of Mechanical and Aerospace Engineering 11.Contract or Grant No. Raleigh, North, Carolina 27607 NASL-9603 13. Type of Report andPeriod Covered 12. SponsoringAgency Name and Address Contractor Report National Aeronautics and Space Administration Washington, DC 20546 14. SponsoringAgency Code I 15. SupplementaryNotes 16. Abstract Design procedures and supporting data necessary for configuring light aircraft to obtain desired responsesto pilot commands and gusts are presented. The procedures employ specializations of modern military and jet .transport practice where these provide an improvement over earlier practice. General criteria for riding and handling qualities are discussed in terms of the airframe dynamics. Methods available in the literature for calculating the coefficients required for a linearized analysis of the airframe dynamics are reviewed in detail. The review also treats the relation of spin and stallto airframe geometry. -
A Two-Stage Fixed Wing Space Transportation System
COpy NO . 0:2.- Report MDC E 0056 15 December 1969 A TWO-STAGE FIXED WING I SPACE TRANSPORTATION SYSTEM FINAL REPORT Volume I Condensed Summary Contract No. NAS 9·9204 Schedule " [ [ (COO!) 31 (CATEOOI'O Report MOe E0056 Volume I 15 December 1969 FOREWORD This report in three volumes, summarizes the results for a McDonnell Douglas Phase A study of a Two Stage-Fixed Wing Space Transportation System for NASA MSC, and is submitted in accordance with NASA Contract NAS9-9204 Schedule II. The three volumes of the report are: Volume I - Condensed Summary; Volume II - Preliminary Design; Volume III - Mass Properties. This is Volume I which presents a condensed summary of our study results. This was a five month study commencing 16 July 1969 with the final report submitted on 15 December 1969. The objectives 'f the study were to provide verification of the feasibility and effectiveness of the MSC in-house studies and provide design improvements, to increase the depth of engineering analyses and to define a development approach. The preliminary design was to be accomplished in accordance with the design requirements specified in the statement of work, and with more detailed requirements provided by MSC at the outset of the study. After the study had progressed to about th, mid-point, NASA redirected the study from a baseline 12,500 1bs payload orbiter to a 25,000 1bs payload orbiter wad changed the payload compartment size from 11 ft diameter by 44 ft, long to a 15 ft diameter by 60 ft long. Directly after this change the program was interrupted so that MDAC could respond to special emphasis requirements imposed by the September Space Shuttle Management Council Meeting.