Tsunami Modelling Along the East Queensland Coast
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Legislative Assembly Hansard 1973
Queensland Parliamentary Debates [Hansard] Legislative Assembly WEDNESDAY, 1 AUGUST 1973 Electronic reproduction of original hardcopy 4 Special Adjournment [1 AUGUST 1973] Papers WEDNESDAY, 1 AUGUST 1973 Mr. SPEAKER (Hon. W. H. Lonergan, Flinders) read prayers and took the chair at 11 a.m. ABSENCE OF THE CLERK Mr. SPEAKER: I have to inform the House that the Clerk of the Parliament has been granted leave of absence to attend the 19th Commonwealth Parliamentary Confer ence in London as the secretary to the Australian States' delegation. OPPOSITION WHIP RESIGNATION OF MR. D. J. SHERRINGTON Mr. SPEAKER: I also have to inform the House that, on 30 June 1973, Mr. D. J. Sherrington tendered his resignation from the position of Opposition Whip. PAPERS The following papers were laid on the table, and ordered to be printed: Reports- Public Accountants Registration Board, for the year 1972. Under Secretary for Mines, for the year 1972. The following papers were laid on the table:- Proclamations under- Racing and Betting Act 1954-1972. Door to Door (Sales) Act Amendment Act 1973. Metric Conversion Act 1972. Justices Act Amendment Act 1973. Small Claims Tribunals Act 1973. The Justices Acts, 1886 to 1968. Jury Act Amendment Act 1972. Elections Act and the Criminal Code Amendment Act 1973. Unordered Goods and Services Act 1973. Mock Auctions Act 1973. District Courts Act 1967-1972. The Maintenance Act of 1965. Water Act and Another Act Amendment Act 1973. Pollution of Water by Oil Act 1973. Orders in Council under- Audit Acts Amendment Act 1926-1971. State and Regional Planning and Dev elopment, Public Works Organization and Environmental Control Act 1971- 1973. -

Early History of the City of Redcliffe Chess Club. Chess in The
Early History of the City of Redcliffe Chess Club. Chess in the wilderness of the Redcliffe Peninsula was hampered by the presence of Bramble Bay, the Pine River and mangrove swamps which cut off Redcliffe from civilized Brisbane where chess clubs abounded. There was a long way via Petrie that was subject to closure by flooding. To make the boat trip you boarded the Olivine at Sandgate or used smoke and mirrors to whistle up Charles and Martha Cutts to row you across. A Pleasant Outing for the Brisbane City Chess club 1922. “Another of those enjoyable little outings of the City Club took place on Monday at Seacamp, Redcliffe when the B Grade team were the guests of Mr Thomas Podmore. ( CAQ President in 1917) A scratch match was played, “Seacamp” v “Freenezy” the team representing the former winning by 2½ games to ½ After dinner, motoring, bathing, cricket and sundry other sports were indulged in. The voyage home per Olivine was somewhat adventurous by reason of a small mishap in the shape of a rope fouling the propeller of the boat. However, Sandgate was eventually reached, although a trifle late.” From Trove The Queenslander, Saturday 7 January 1922. Early History taken from the CRCC Monthly Minutes Book AGM President Secretary Captain Venue Treasurer 1960 1961 1962 1963 Fred Ward Mike Dyer Mike Dyer Redcliffe Youth Club Hall 1964 Fred Ward G R Pevitt Mike Dyer Redcliffe Youth Club Hall 1965 Fred Ward Viv Greenelsh Mike Dyer Humpy Bong Yacht Club Jul 1966 Fred Ward Viv Greenelsh Mike Dyer Humpy Bong Yacht Club Jul 1967 Fred Ward Viv -
Houghton Highway Duplication Project: Construction Update
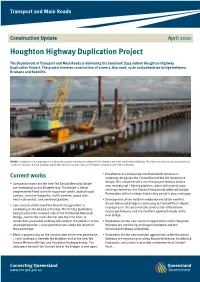
Construction Update April 2010 Houghton Highway Duplication Project The Department of Transport and Main Roads is delivering the landmark $315 million Houghton Highway Duplication Project. The project involves construction of a new 2.7km road, cycle and pedestrian bridge between Brisbane and Redcliffe. ABOVE: Installation of a temporary steel falsework structure in progress alongside the Clontarf end of the old Hornibrook Bridge. This will be used to assist construction of a new recreational / fishing platform, which will extend 100m into Hays Inlet from the Clontarf portal of the old bridge. • Installation of a temporary steel falsework structure is Current works underway alongside the Clontarf end of the old Hornibrook Bridge. This structure will assist the project team to build a • Completion works for the new Ted Smout Memorial Bridge new recreational / fishing platform, which will extend 100m are continuing across Bramble Bay. The bridge is being into Hays Inlet from the Clontarf entry portal of the old bridge. progressively fitted-out with expansion joints, asphalt road Restoration of the heritage-listed entry portal is also underway. surface, concrete footpaths, traffic barriers, guard rails, electrical conduit, and overhead gantries. • Development of the northern embankment of the new Ted Smout Memorial Bridge is continuing at Clontarf Point. Works • Construction of the new Pine River fishing platform is in progress in this area include construction of foreshore continuing in the middle of the bay. The fishing platform is landscape features and the northern approach roads to the being built on the seaward side of the Ted Smout Memorial new bridge. Bridge, next to the main channel into the Pine River. -

Jiiilmlir X0177289
~Iufni!jiiilmlir X0177289 g Queensland Government 09 RfC~ ,1f/fD J -j 0 M4N File no: 500/00701 ..,t~ Sc 201S SIc '/., Nal11l'C \./"' 011, Mr John Knaggs , ;., " . ,- j.. '. 2 Chief Executive Officer \ Sunshine Coast Council Locked Bag 72 Sunshine Coast Mail Centre Qld 4560 For your information, - for Doug Wass District Director (North Coast) 25 March 2015 Department of Transport and Main Roads .. Queensland Government Ourrer 500/00701-68228 Department of Your ref SC-4922 Transport and Main Roads Enquiries: Mr Bill McRuvie Imm 25 March 2015 Mr Sean Dwyer Civil Engineer Empire Engineering PO Box 102 Mooloolaba aid 4557 [email protected] Dear Mr Dwyer Sunshine Coast Council Maroochydore Road Proposed accesses to Service Station Project Number: SC-4922 TMR DA Reference Number: TMR14-011616 Property description: lot 1 RP202696 Site Address: 9 Church Street, Maroochydore Approximate TMR through chainage: 9.90-10.00 this office with attached details of the Thank you for your recent email addressed to proposed works. The Department of Transport and Main Roads (TMR)have no objections to the proposed works as shown on the Empire Engineering plans numbered C001; COOS; C010; C011; C020; C025; C030; C040; and C050 (all Rev A and dated 9 March 2015) for project number SC- 4922, subject to the following conditions: 1. Standard Conditions of Approval for Minor Works The works must be constructed in accordance with the attached Standard Conditions of District. Approval Minor Works on State-Controlled Roads-North Coast 2. Approval to Commence Work work within the This letter is not an authority to start work and you must not commence boundaries of the state-controlled road until the requirements of condition 3 of the Standard Conditions have been complied with. -

Posties, Cops and Ferrymen
Posties, Cops and Ferrymen Part One of a paper covering the provision of government services in the early days of the suburb of St Lucia Andrew Darbyshire St Lucia History Group Research Paper No 7 St Lucia History Group CONTENTS Introduction and Authors Notes, References 2 Postal Services Brief History Post & Telegraph Services in Queensland 5 West Milton 8 Dart’s Sugar mill, Indooroopilly 9 St Lucia Ferry 10 Guyatt’s Store 10 Brisbane University 11 St Lucia 11 Taringa East 12 Toowong 19 Indooroopilly 22 Witton Park 27 Taringa 28 Police Stations Introduction to Research Notes 33 Toowong 34 Indooroopilly 38 Taringa 44 Ferries West End Ferries 50 Indooroopilly Ferry 67 Andrew Darbyshire March 2017 Private Study Paper – not for general publication Issue No 1 (Draft for Comment) - February 2004 Issue No 2 (Supplementary Info) – November 2004 Issue No 3 (Supplementary Info) – March 2005 Issue No 4 (Supplementary Info) – May 2005 Issue No 5 (Supplementary Info) – September 2005 Issue No 6 (Supplementary Info/Images added) – February 2007 Formatting and minor edits, WE Ferries updated – January 2010 Re-shuffle of Post Office notes – March 2017 St Lucia History Group PO Box 4343 St Lucia South QLD 4067 [email protected] brisbanehistorywest.wordpress.com ad/history/posties cops and ferrymen Page 1 of 69 St Lucia History Group INTRODUCTION AND AUTHORS NOTES Considering its closeness to the city the current day area of the suburb of St Lucia must have been a government administrators dream when it came to spending on public works and services. Primarily a semi rural/small farming community until the 1920’s the suburban building boom largely by-passed most of St Lucia until the 1940’s when construction of the new campus and relocation of the University created the impetus for residential development. -
Urban Fish Habitat Management (UFHM) Research Program
vation lopment and Inno mic Deve nt, Econo Employme nt of rtmeaDep nt of Urban fish habitat management [UFHM] research program Innovations in urban fish habitat management: balancing the needs of the community and fisheries resources © The State of Queensland, Department of Employment, Economic Development and Innovation, 2010. Published 2005 as Urban fish habitat management [UFHM] research program 2005/6 and beyond; revised March 2007, March 2008, March 2009, March 2010. Except as permitted by the Copyright Act 1968, no part of the work may in any form or by any electronic, mechanical, photocopying, recording, or any other means be reproduced, stored in a retrieval system or be broadcast or transmitted without the prior written permission of the Department of Employment, Economic Development and Innovation. The information contained herein is subject to change without notice. The copyright owner shall not be liable for technical or other errors or omissions contained herein. The reader/user accepts all risks and responsibility for losses, damages, costs and other consequences resulting directly or indirectly from using this information. Enquiries about reproduction, including downloading or printing the web version, should be directed to [email protected] or telephone +61 7 3225 1398. Contents Contents 1 Overview 1 UFHM Research Program objectives 2 Table 1 UFHM Research Program research streams 3 Stream 1 – Fish habitat utilisation 4 Stream 2 – Impacts on fish habitats 4 Stream 3 – Intertidal and subtidal structures as fish habitats -

2020 December to 2021 February
December 2020, January, February 2021 PRESIDENT’S PIECE Goodbye 2020 and welcome 2021. The new year does not have the same sound that 2020 had but I am hoping it will be a better year for all. Nobody could have imagined at the start of this year what a different year it would be. It is a year that most people will not look back on with fond memories but now that it is almost behind us, we can look forward to the new year. I hope that our lives will soon return to the way it used to be, prior to the pandemic. I think the way our State and Federal leaders have managed the pandemic Inside this issue: is a credit to them but it not would have been achieved without the co- operation of the Australian people. I think that each and everyone of us can Presidents Piece Cont.. 2 have a pat on the back and be told, well done. It may be a long time before The Passing of Time 3 we can say that COVID-19 is a thing of the past but our future is looking Research Report 4 more and more optimistic with each passing month. Hopefully some of our more senior members such as Sheila Dockrill will once again be able to In the Papers 5-6 attend our general meetings and enjoy the company of fellow members. George Mavor 7 The History of Christmas 8-9 HR suffered the same fate as all other Societies and we were not able to Trees hold our general meetings from April to July. -

Government Hon I(Ate Jones MP Member Forashgrove
Government Hon I(ate Jones MP Member forAshgrove Ref CTS 13736/10 Minister for Climate Change and Sustainability Mr Neil Laurie The Clerk of the Parliament Parliament, House George Street BRISBANE QLD 4000 Dear Mr Laurie I refer to your letter of 4 August 2010 enclosing a copy of Petition No. 1458-10 lodged in the Queensland Legislative Assembly. The Petition requests that the House make the Hornibrook Bridge safe for public access and activity by any and all means possible, and to reconsider the decision to destroy this public icon and to use the funding set aside for the demolition to restore the bridge so that it will be preserved for future generations of Queenslanders. Whilst the Petition represents the feelings of concerned citizens, the future of the bridge has also been the subject of consideration for the Department of Environment and Resource Management. Studies carried out between 2004 and the end of 2005 identified the whole span to be in a severely deteriorated condition due to its age. As a part of these studies, options for the future use of the bridge were considered by an agency reference group that included the department. The feasibility of retaining the whole span for pedestrian and cycling use was given close consideration, however, it was determined that the structure was in such a deteriorated state it was not suitable for restoration. On 14 February 2007, an application was received by the department, under section 45 of the Queensland Heritage Act 1992, from the now Department of Transport and Main Roads, proposing the retention of the bridge portals and the reconstruction of a section of bridge at each end and the construction of a fishing platform while removing the majority of the span. -

Construction Update
Construction update October 2009 Houghton Highway Duplication Project This update has been prepared for people with an interest in the delivery of the landmark $315 million Houghton Highway Duplication Project, which involves construction of a new 2.7km road, cycle and pedestrian bridge between Brisbane and Redcliffe. The project is being undertaken by Main Roads and its construction contractor, the Hull Albem Joint Venture, and is scheduled for completion in mid 2011 (weather permitting). ABOVE: ANOTHER NEW SPAN OF THE TED SMOUT MEMORIAL BRIDGE TAKES SHAPE IN BRAMBLE BAY. Current works Construction of the Ted Smout Memorial Bridge is continuing in Bramble Bay. Fifty-six of its 78 spans have now been built off the Brighton foreshore, and stretch almost 2 km across the bay towards Clontarf. These are being progressively fitted with concrete barriers, guard rails, and electrical conduit. Another five new spans are currently under construction, in various stages of completion. Construction of the new Pine River Fishing Platform is also continuing in Bramble Bay. The platform is being built on the seaward side of the Ted Smout Memorial Bridge, next to the main channel into the Pine River. A wheelchair-accessible walkway will connect the platform to a shared pedestrian / cycle path that runs along the length of the new bridge. Construction of new pedestrian / cycle underpasses is in progress at both ends of the Houghton Highway. The underpasses will run beneath the existing Houghton Highway bridge and the new Ted Smout Memorial Bridge. Construction update Development of the northern embankment of the new Ted Smout Memorial Bridge is in progress at Clontarf Point. -

Connecting SEQ 2031 an Integrated Regional Transport Plan for South East Queensland
Connecting SEQ 2031 An Integrated Regional Transport Plan for South East Queensland Tomorrow’s Queensland: strong, green, smart, healthy and fair Queensland AUSTRALIA south-east Queensland 1 Foreword Vision for a sustainable transport system As south-east Queensland's population continues to grow, we need a transport system that will foster our economic prosperity, sustainability and quality of life into the future. It is clear that road traffic cannot continue to grow at current rates without significant environmental and economic impacts on our communities. Connecting SEQ 2031 – An Integrated Regional Transport Plan for South East Queensland is the Queensland Government's vision for meeting the transport challenge over the next 20 years. Its purpose is to provide a coherent guide to all levels of government in making transport policy and investment decisions. Land use planning and transport planning go hand in hand, so Connecting SEQ 2031 is designed to work in partnership with the South East Queensland Regional Plan 2009–2031 and the Queensland Government's new Queensland Infrastructure Plan. By planning for and managing growth within the existing urban footprint, we can create higher density communities and move people around more easily – whether by car, bus, train, ferry or by walking and cycling. To achieve this, our travel patterns need to fundamentally change by: • doubling the share of active transport (such as walking and cycling) from 10% to 20% of all trips • doubling the share of public transport from 7% to 14% of all trips • reducing the share of trips taken in private motor vehicles from 83% to 66%. -

Thematic History of the Sunshine Coast Sunshine Coast Heritage Study Sunshine Coast Council August 2020
Thematic History of the Sunshine Coast Sunshine Coast Heritage Study Sunshine Coast Council August 2020 Converge Heritage + Community Contact details are: Simon Gall Converge Heritage + Community ABN:71 366 535 889 GPO Box 1700, Brisbane, 4001 Tel: (07) 3211 9522 Email: [email protected] Copyright © 2018 Document Verification Project Sunshine Coast Heritage Study Project Number 16031C Document Title Thematic History of the Sunshine Coast FINAL_14-02-2018 File Location Share Point Client Sunshine Coast Council Version history Revision Date Nature of revision Prepared by Authorised by 0 15/02/2016 Draft report BR, CB CB 1 14/02/2018 Final report CB - 2 Thematic History of the Sunshine Coast | 2 Contents 1 Introduction ........................................................................................................................ 7 1.1 Project Background ....................................................................................................................... 7 1.2 Purpose of this report ................................................................................................................... 7 1.3 Methodology ................................................................................................................................. 8 1.4 Sources .......................................................................................................................................... 9 1.5 Aboriginal cultural heritage and scope of document .....................Error! Bookmark not defined. 1.6 Authorship -

Rothwell GRACE GAZETTE October Edition 2020
Rothwell GRACE GAZETTE October Edition 2020 EXO Day LIFE IS EXO-LLENT WITH JESUS Heart to heart Will Marathon for Simon a mate Going Green IN THISIssue 3 GRACE ABOUNDS 4 HEAD OF CAMPUS ADDRESS 5 FOOD, FUN & FAITH | EXO DAY 2020 7 WILDMAN & WORMHOLES | BREAKTHROUGH JUNIOR CHALLENGE 9 GRACE GRADUATES | WILL SIMON GOING GREEN 12 FILM NIGHT 2020 15 END OF AN ERA | GOODBYE GOOGA 18 HEART TO HEART | MARATHON FOR A MATE 22 THIS MONTH AT GRACE 24 GRACE APPRECIATES 32 CONTACTS & SOCIAL LINKS Grace Abounds 3 Everybody matters to God whether God matters to them or not. This certainly wasn’t a common view in ancient times. Polytheistic cultures (worshipping multiple gods) of the ancient world didn’t believe the gods cared about Grace people. So, if the gods didn’t care about the people, ABOUNDS why should people care about people?! In fact, when Jesus entered the world, the whole idea that “everybody matters” just wasn’t the case at all! Slavery wasn’t merely practised in the ancient world, slavery was assumed. Everyone was just one invaded town, one poor financial decision, one bit of bad Give to him who asks you, and from luck or one bad day away from becoming somebody else’s property. Jesus entered a world where people him who wants to borrow from you were treated like property. Compassion and humility do not turn away. You have heard to anyone outside of your own family was considered a weakness. But Jesus was famous for how he treated that it was said, ‘You shall love your and loved people, and His message was so clear.