Optimal Yacht Rig Design Using Mathematical Programming
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Standing Rigging 27
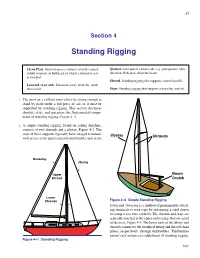
4 – Standing Rigging 27 Section 4 Standing Rigging Chain Plate. Metal strap on a sailboat, usually secured Quarter. After part of a boat’s side, e.g., port quarter. Also, to hull structure or bulkhead, to which a shroud or stay direction 45 degrees abaft the beam. is attached. Shroud. Standing rigging that supports a mast laterally. Leeward (Loo’ard). Direction away from the wind, downwind. Stays. Standing rigging that supports a mast fore and aft. 1 The mast on a sailboat must either be strong enough to stand by itself under a full press of sail, or it must be supported by standing rigging. This section discusses shrouds, stays, and spreaders: the fundamental compo‑ nents of standing rigging, Figure 4–1. 2 A simple standing rigging, found on sailing dinghies, consists of two shrouds and a jibstay, Figure 4‑2. The ends of these supports typically have swaged terminals Jibstay Shrouds with an eye at the upper end and a turnbuckle stem at the Backstay Jibstay Upper Boom Shroud Crutch Lower Shrouds Figure 4–2 Simple Standing Rigging lower end. Swaging is a method of permanently attach‑ ing terminals to wire rope by deforming a steel sleeve to clamp it to a wire securely. The shrouds and stays are typically attached at the upper end to tangs that are a part of the mast, Figure 4‑3. The lower ends of the jibstay and shrouds connect to the stemhead fitting and shroud chain plates, respectively, through turnbuckles. Turnbuckles permit easy and precise adjustment of standing rigging, Figure 4–1 Standing Rigging Sail 28 4 – Standing Rigging Mast Ta ng Through Bolts Clevis Pin Swaged Fitting Shroud or Stay Cotter Pin Backstay Jibstay Figure 4–3 Shroud and Tang Assembly Shroud or Stay Swaged Fitting Right Hand Thread Tu rnbuckle Barrel Cotter Pins Left Hand Thread Marine Fork Clevis Pin Figure 4–5 Fractional Rig Sloop provide a better sail shape, is possible with a fractional Cotter Pin rig. -

Judy Blumhorst's Lecture Notes
file:///C:/Users/Judy/Dropbox/!Hyde-Sails/knowlegebase/Updating the C... Judy Blumhorst - 2 March 2013 JudyBSails.com Hyde Sails of Northern CA UPDATING THE CLASSIC POTTER 19 I. Potter Hull shape A. Hull is a great candidate for updating B. Can sail faster than displacement hull speed due to Llat panels II. Potter 19 Sport and Voyager 20 vs Classic 19 1. Sport and Voyager have more ballast than Classic P19 a) Stiffer than a P19 classic b) allows boat to carry more sail area 2. Sport and Voyager have a Taller Mast than Classic P19 a) Faster boat than the P19 Classic b) 30% more sail area overall c) 25’ mast, 7/8 fractional rig 3. Judy B’s Potter 19 Sport – Fastest, Stiffest, Sportiest Potter a) 300 pound keel bulb at bottom of the standard steel keel = 570 pounds (1) Draft 49” (2) Boat has 2.5 times more righting moment than Classic Potter – (3) Self-righting in a knockdown (a) Angle of Vanishing Stability was calculated @ 102-104 degrees b) Bow sprit for Asymmetric Cruising Spinnaker – c) New P19 interior without port cabinet is much more open inside. 4. Marine’s Voyager 20 – Biggest, very stable, most comfy Potter a) LOA is 19.5’ (1) Added 1’ to cockpit, new lockers, etc. b) Shoal keel with approx. 500-600 pounds ballast (1) Boat tracks extremely well, like a cutaway c) No keel trunk in cabin. d) New Interiour without port cabinet is very open inside e) Boat is much stiffer than Classic Potter CRUISING SPINNAKERS: SAILING FASTER THAN THE WIND III. -

Fractional Rig Without a Masthead Backstay with Aft Swept Spreaders
Fractional rig without a masthead backstay with aft swept spreaders Tuning instructions Comments These instructions should be read in conjunction with 1. Forestay tension Hints & Advice (H&A), (part. no: 595-540-E). The forestay tension is mainly controlled by tightness of the angled cap shrouds. If the leeward cap is slack, the forestay tension decreases drastically as the forestay mast attachment moves forward and the forestay sags. CAUTION! – When sailing with the main reefed so that the head- A sheeted, full main has a backstay effect created by board is 0.5 - 1 m below the forestay attachment, the mainsheet / leech tension. This influences forestay tension. mast can achieve a dangerous negative bend unless action is taken (see Comments 3.2.2). Regarding running backstays see Comments 3.2.9 – When sailing downwind in strong winds (especially with a spinnaker hoisted) cap shroud tension and mast compression will be high (see Comments 3.2.7). 1. Step the mast according to H&A, Fig. 1a. Correctly tuned cap shrouds chapters A, B and C1-C3. wind 2. Keelstepped masts only: Fit the tie rod rigging screws and mast mast a rest chocking according to H&A, C5-C7. both cap shrouds tensioned 3. Give the mast the desired fore and aft mast during sailing rake using the forestay. 4. Tension the cap shrouds to about 15% of both shrouds together restrict forward motion. the breaking load of the wire (see H&A, C4). This pushes the mast forward in the region of the spreaders. Fig. 1b. Incorrectly tuned cap shrouds 5. -
AKA List of Boat Class Version for SP List
9/14/2011 CLASS VERSION LIST (aka) Page 1 of 10 BOLD items are boats in PHRF-LO database THIS BOAT WITH/IS A VERSION OF IS A VERSION OF OR KNOWN AS ALDEN 45 EXTENDED STERN ALDEN 43 ALDEN 48 EXT STERN ALDEN 46 ALDEN 50 EXT STERN ALDEN 46/48 ALDEN 54 EXTENDED STERN, KETCH ALDEN 50/52 ALLIED 3030 AKA CHANCE 3030 ALLIED 39 SKEG RUDDER,NEW TRANSOM BORSAW 40/OWENS 40 ALLMAND 35 AKA CAPTIVA 35 ALOHA 8.2 AKA ALOHA 27 ANNAPOLIS 35 AKA YOUNG SUN 35 ANNAPOLIS 44 SLOOP LUDERS 44 ANTIGUA 44 AKA CSY 44 WALK-THROUGH ANTIGUA 53 UPDATED MORGAN OI51 APHRODITE 101 AKA BIANCA 101 APHRODITE 101 AKA INTERNATIONAL 101 AQUARIUS 23 AKA BALBOA 23 AQUARIUS 23-2 KEEL AQUARIUS 23 AQUARIUS 7.0 MASTHEAD,OUTBOARD RUDDER AQUARIUS 23 ARCO 33 Renamed COLUMBIA 33 ATLANTIC 44 AKA Jeanneau SO/Sun Magic 44 AURA 10.7 AKA COLUMBIA 10.7 AURA 8.7 AKA COLUMBIA 8.7 AURA H35 AKA HUGHES 35 AURA H40 AKA HUGHES 40 BABA 40 AKA PANDA 40 BAHAMA 26 AKA ISLANDER 26 BAHAMA 28 AKA ISLANDER 28 BAHAMA 30 NEW KEEL,RUDDER, AND DECK ISLANDER 30-2 TM BALBOA 23 AKA AQUARIUS 23 BALBOA 8.2 AKA BALBOA 27 BALT Family 17 AKA Jeanneau Sun Fast 17 BALTIC 33 SAIL DRIVE,TEAK DK OVERLAY,NEW KEEL C+C 33 BAYFIELD 25 AKA BAYFIELD 2325 BAYFIELD 32 AKA BAYFIELD 3032 BAYFIELD 32C TALL RIG, BOW SPRIT BAYFIELD 32 BBM IMS 39 IMSized PETERSON 38 BENETEAU 305 MORE FREEBOARD,MODIFIED STERN BENETEAU 30E BENETEAU 30ES IOR SKIRT STERN,LEAD KEEL,FRAC RIG BENETEAU 30E BENETEAU 325 MORE FREEBOARD,MODIFIED STERN BENETEAU 32 BENETEAU 46 AKA BENETEAU 461 BENETEAU EVASION 28 PILOT HOUSE BENETEAU ESCAPADE 28 BENETEAU IDYLLE 1150 -

ADJUSTMENTS, RECOMMENDATIONS 12 13 CATAMARANS - Special Instructions Marks
CATAMARANS ADJUSTMENTS, RECOMMENDATIONS 12 13 CATAMARANS - Special instructions Marks Catamarans are usually fitted with self-standing systems, - the mast must be placed lengthways in the boat; which keep the mast in place with a forestay and two top - to carry out the adjustments, use the mainsail halyard in order to mea- stays fastened to chain plates on the hull. sure the distance to an equidistant point on either side. These self-standing masts can be divided into two ϕ = 1 to 1,5° groups: Rake - pivoting masts called teardrop masts or wing masts 13.1 - finely adjust in order to find the best “Rake/Prebend” (wing masts as found on Formula (see below); 28 and F 40); - the tension of the forestay and the backstay should, if - fixed masts. possible, be the same as that of the shrouds and should These fixed masts are rigged in different ways: induce a rake ϕ (angled backwards) by about 1 to 1.5°. - masts on tripods: the spreaders are connected to the front by a martingale and a jumper enabling - e.g.: 10-metre mast: masthead the mast to be made rigid lengthways; pushed back by about 20 cm. - intermediate shapes: the mast is simply supported This mast rake will determine sideways by the spreaders and a bigger set of whether the boat has a lee shrouds (not self-standing lengthways, so no jum- helm or a weather helm. pers); The greater the rake, the more car take out weather helm and vice versa. - chimney masts: with no front jumper nor sprea- Catamaran rig ders, but the shrouds include lower shrouds and (diamond rig) Adjust only for a very small amount of pre-bend on occasionally a staysail stay. -
HINTS and ADVICE on Rigging and Tuning of Your Seldén Mast
HINTS AND ADVICE on rigging and tuning of your Seldén mast Instructions for rigging. Conditions for valid guarantee. 1 2 Introduction 4 Rig types 6 Longitudinal rigging 8 Lateral rigging 10 Running rigging 12 Preparing the yacht for rigging 15 Checking the mast 16 At the crane 22 Keel-stepped masts 24 Alternative rigging of jib furling system 29 Tensioning the cap shrouds 31 “The folding rule method” 32 Tuning for safety 33 Masthead rigs 35 Fractional rigs 45 19/20 rig and similar 51 Bergström-Ridder rig 53 Booms 56 Rodkicker 59 Working aloft 60 Unstepping the mast 63 Annual maintenance 64 Damage or cosmetic flaws? 68 Storage 69 Mounting new fittings 70 Masts which are seldom unstepped 71 Boat ashore with the rig still in place 71 Calculating mast and rig dimensions 72 Positive roach + in-mast furling 75 Sail slides and sail entry (MDS) 76 The Seldén product range 77 Notes 90 Conversion factors 90 All rights reserved. No portion of this publication may be reproduced without the written permission of Seldén Mast AB. Printed in Sweden. Specifications and instructions contained herein are subject to change without notification. © Seldén Mast AB 3 The rig The rig – a combination of masts, booms, rigging and all types of equipment. It is obvious that the rig is a large and vital part of your yacht. Tuning for the best mix of perfor mance, reliability and operating safely requires a degree of knowledge. With “Hints and advice”, we aim to share with you our practical experience. You probably know most of this, but there is always something new to learn. -

United States Sailing Association Your Passion. Organized. HISTORY OF
United States Sailing Association Your Passion. Organized. HISTORY OF US PHRF® AFFILIATED HANDICAPS 2016 PHRF® is a Registered Trademark of the United States Sailing Association Copyright 2016 United States Sailing Association Box 1260, Portsmouth, RI 02871 www.ussailing.org (401) 683-0800 FAX (401)683-0840 THE UNITED STATES PERFORMANCE HANDICAP RACING FLEET The United States Performance Handicap Racing Fleet (USPHRF) is an empirical handicapping rule administered by a technical rule committee of US Sailing. The USPHRF Committee promotes performance handicap racing for monohull and multihull sail boats applying the PHRF rule. The Committee researches, develops, and distributes guidelines for performance handicapping using systematically applied empirical methodology to determine estimates of speed potential. PHRF Committee Position Address Phone Type Bingman, Bruce Chair 498 Sara Dr. 1 (410) 280-2309 Home Annapolis, MD, 21401 1 (703) 801-4388 Mobile 1 (202) 781-5932 Work Ansfield PhD, Paul J. Vice Chair 1135 Maricopa Dr 1 (920) 233-5782 Fax Oshkosh, WI, 54904-8118 1 (920) 233-5743 Home 1 (920) 312-8185 Mobile Barnes, Tom Member at Large 12470 Country Club Drive 1 (231) 547-5137 Home Charlevoix, MI, 49720 1 (231) 547-1473 Work Bottino MD, Gino C. Member at Large 215 Courtland Ave 1 (914) 646-9200 Mobile Stamford, CT, 06906 1 (914) 241-8866 Work Collins, John J Member at Large 23 Pilgrim Rd 1 (781) 639-1648 Home Marblehead, MA, 01945-1710 Kellner, Bill Member at Large 32331 Stoney Brook Dr 1 (440) 933-9917 Fax Avon Lake, OH, 44012-2136 1 (440) 667-3732 Mobile Kendrick, June Member at Large 11 Anthony Ct 1 (631) 549-4810 Huntington, NY, 11743-1327 1 (631) 673-5781 Home Plant, Robert H Member at Large Stauber, Keith J Member at Large 4139 S Lake Avenue 1 (218) 722-6255 Home Duluth, MN, 55802-2551 1 (218) 390-1776 Mobile Tichenor, James H Member at Large 3827 Del Monte Dr. -

Rig Tuning Guidelines
RIG TUNING GUIDELINES Large books have been written on this subject, but we shall attempt to give you a concise set of basic guidelines. So here goes..... The aims of RIG TUNING are as follows: a. Ensure a straight mast athwartships b. Control sail shape. c. Achieve proper helm balance in a variety of conditions d. Spread loads appropriately on spars, rigging and boat. Different rig configurations require a different rig tuning process: --------------------------------------------------------------------- RIG TUNING - SINGLE SPREADER MASTHEAD RIG --------------------------------------------------------------------- 1. Fore and Aft Tune 1.1 Mast Rake Mast rake is determined by forestay length. Rake affects helm balance - raking the mast increases weather helm. As a starting point, use the designed rake on the sailplan (ask the boat designer, not the mastmaker). If no information is available, start at 1:30.(eg 50 cm rake on a 15m mast). To measure rake, tension the backstay approximately 60%, then check rake with a weight attached to the main halyard. (Boat must be floating level when you do this!). Adjust forestay as necessary to obtain the desired angle. 1.2 Mast Bend A certain amount of pre-set mast bend is desirable, to stabilise the middle part of the mast and thus minimise rig pump in a seaway. With a masthead rig, mast bend can be induced by tensioning the forward lowers (if fitted), or babystay (if fitted). See 2.2.3 below. 2. Transverse Tune 2.1 Centering the mast in the boat. Ensure backstay and upper shrouds are relatively slack (to minimise mast bend). Use the main halyard to measure from the masthead to the chainplate each side. -

Downwind Load Model for Rigs of Modern Sailing Yachts for Use in FEA
THE 16th CHESAPEAKE SAILING YACHT SYMPOSIUM ANNAPOLIS, MARYLAND, MARCH 2003 Downwind Load Model for Rigs of modern Sailing Yachts for Use in FEA Guenter Grabe, Yacht Research Unit, University of Applied Sciences, Kiel, Germany ABSTRACT Dm drag main Llm lift leech main Standard approaches to define loads for a rig start Dlm drag leech main with the righting moment of a yacht at 30 degrees of heel. Lfm lift foot main This is a quite good approach for defining maximum Dfm drag foot main lateral forces of the sails on upwind courses. For Lspr lift spreader tip main downwind courses this procedure may be questioned Dspr drag spreader tip main because the forces from the sails are no longer limited by Ml membrane leech main the righting moment. In this paper the loading for rigs of Mf membrane foot main modern sail yachts in the downwind sailing condition is V vang discussed. A load model based on sail areas and apparent DLl drag and lift on leech perpendicular to plane wind speeds for application in FEA is developed. The of main sail load model will be evaluated by comparing real size rig DLf drag and lift on foot perpendicular to plane of measurements performed on the Technical University of main sail Berlin’s research sailing yacht “DYNA” with a finite element analysis of her rig. Forces spinnaker: Lsp lift spinnaker NOTATION Dsp drag spinnaker Ltsp lift tack spinnaker AWA apparent wind angle Dtsp drag tack spinnaker AWA apparent wind speed Vtsp vertical tack spinnaker FEA finite element analysis Lhsp lift head spinnaker CFD computer fluid dynamics Dhsp drag head spinnaker Vhsp vertical head spinnaker CL lift coefficient Hsp halyard spinnaker CD drag coefficient Hvsp halyard vertical spinnaker Ρair density air Am area main Forces rig frame: Asp area spinnaker Fx forward Fy athwart to port side Forces main sail: Lm lift main 1. -

Rod on Sailing, Lessons from the Sea
Rod on Sailing, Lessons from the Sea This book is dedicated with love to Marge, my wonderful wife for over 40 years, who died after a valiant struggle with pneumonia. Marge was a very quick learner and she never forgot anything or anyone we needed to know. She had a soft and friendly voice and had the most beautiful hair, morning, noon and night, and a ready smile to match. She gave us our lovely daughter Betsi, to whom this book is also dedicated. Table of Contents Preface................................................................................................................................. 4 Anchors............................................................................................................................. 12 Standing Rigging .............................................................................................................. 30 Storm Sails........................................................................................................................ 41 Ventilation......................................................................................................................... 54 Hatches.............................................................................................................................. 61 Cabins ............................................................................................................................... 65 Doors ............................................................................................................................. 65 Stoves............................................................................................................................ -
05 Sails and Rigging Copy2.Indd
CChapterhapter 5 SSailsails aandnd Rigging HH1818 V1.010610 • P/N 1036242 Hunter 18 • Sails and Rigging Sails & Rigging 5.1 Main Rig Components Most sailors believe that sailing is hard work: all those lines • Anodized B&R Rig Mast to tend, halyards to yank and sails to lug. Hunter Marine • Boom has dispelled that myth once and for all! Innovations by • Single Line Reefing System the crew at Hunter Marine have made sailing easier, safer • Furling Jib and more comfortable. The result - much more sailing fun! • Internal Halyards led to Cockpit • Large Roach Mainsail w/Flaking System Whether you are ready to set sail for the day or just • Mainsheet and vang around the buoys, your Hunter can really make a differ- ence. Starting with the tall, fractional rig, which is a direct Over the course of the next few pages we will outline descendent of the B&R rig, Hunter has engineered the some of the components featured here, along with some mast to carry less weight aloft with a smaller sections. of the optional components of your sails and rigging This is accomplished by utilizing swept-back spread- aboard your Hunter sailboat. ers and reverse diagonals. This combination provides superior strength without a backstay and increases the stability at the same time. By using a large roach main 5.2 The Mast as the power sail, Hunter has eased the effort in sail handling and allowed for real versatility for all wind and Your main and most vital rig component is the mast. It sea conditions. carries the sails and is supported by the standing rigging as shown on page 12.11. -

PHRF Ratings Summary Updated: 09/05/20
FCSA - PHRF Ratings Summary Updated: 09/05/20 For your individual certificate, type in the URL Bar the following: www.sailjax.com/2020/Certs/BOAT-NAME.pdf 700 / 700 / (upper/lower case matters) (550+Spin) (550+NSpin) Sail # Boat Name Spin N-Spin TCF TCF-NsP Boat Make Base Club First Last 95 ACTAEA 183 201 0.9550 0.9321 HINCKLEY BERMUDA 40 MkII Yawl 177 Rat Island ANTHONY HARWELL 1 41038 ADVENTURE 117 138 1.0495 1.0174 C&C 38-3 CB 108 SAYC DENISE SMITH 2 4 ALCHEMIST 54 74 1.1589 1.1218 JEANNEAU SUN FAST 3300 54 SAS MIKE COE 3 49 ALLONS-Y 144 163 1.0086 0.9818 JEANNEAU 349 135 SAS CHUCK POINTS 4 386 ARIEL 156 172 0.9915 0.9695 HUNTER 386 SD 141 SAYC DANIEL FLORYAN 5 11732 AUGUSTA BELLE 270 290 0.8537 0.8333 CATALINA 22 270 SAYC LAWRENCE MacCORMACK 6 83272 AVENGER 102 120 1.0736 1.0448 CARRERA 290 (Mod) 96 NFCC GARY VAN TASSEL 7 67 BERNOULLI 144 165 1.0086 0.9790 PEARSON 36-2 CB 132 EFYC, NFCC ALLEN JONES 8 31706 BIGTIME 129 150 1.0309 1.0000 S-2 10.3 117 NFCC DAVID PARRISH 9 114 BLUE SKY 177 199 0.9629 0.9346 C&C 32 CB 171 SAYC DANA HUNTER 10 60382 BREEZING UP 144 166 1.0086 0.9777 BENETEAU OC 423 132 PCYC ROBERT MAHER 11 485 CALYPSO 264 278 0.8600 0.8454 STARWIND 223 264 None PHILIP FILIPOV 12 1969 CALYPSO BREEZE 162 182 0.9831 0.9563 MORGAN 41 CB 144 PYC CAROLYN BALL 13 81 CAPER 201 223 0.9321 0.9056 PEARSON 35 KETCH 180 NFCC PETER KOROUS 14 473 CHASSEUR 114 142 1.0542 1.0116 PETERSON 34 (Mod) 114 SAYC GEORGE FORRESTER 15 40168 CHEETAH 120 141 1.0448 1.0130 J-29 MH IB 120 RCoJ BUBBA FUTCH 16 407 COMPASS ROSE 261 279 0.8631 0.8444 CAPE