Hybrid Sensorless Field Oriented and Direct Torque Control for Variable Speed Brushless DC Motors Kellen Carey Marquette University
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

High Speed Linear Induction Motor Efficiency Optimization
Calhoun: The NPS Institutional Archive Theses and Dissertations Thesis Collection 2005-06 High speed linear induction motor efficiency optimization Johnson, Andrew P. (Andrew Peter) http://hdl.handle.net/10945/11052 High Speed Linear Induction Motor Efficiency Optimization by Andrew P. Johnson B.S. Electrical Engineering SUNY Buffalo, 1994 Submitted to the Department of Ocean Engineering and the Department of Electrical Engineering and Computer Science in Partial Fulfillment of the Requirements for the Degree of Naval Engineer and Master of Science in Electrical Engineering and Computer Science at the Massachusetts Institute of Technology June 2005 ©Andrew P. Johnson, all rights reserved. MIT hereby grants the U.S. Government permission to reproduce and to distribute publicly paper and electronic copies of this thesis document in whole or in part. Signature of A uthor ................ ............................... D.epartment of Ocean Engineering May 7, 2005 Certified by. ..... ........James .... ... ....... ... L. Kirtley, Jr. Professor of Electrical Engineering // Thesis Supervisor Certified by......................•........... ...... ........................S•:• Timothy J. McCoy ssoci t Professor of Naval Construction and Engineering Thesis Reader Accepted by ................................................. Michael S. Triantafyllou /,--...- Chai -ommittee on Graduate Students - Depa fnO' cean Engineering Accepted by . .......... .... .....-............ .............. Arthur C. Smith Chairman, Committee on Graduate Students DISTRIBUTION -
Brushless DC Motor Controller
ON Semiconductor Is Now To learn more about onsemi™, please visit our website at www.onsemi.com onsemi and and other names, marks, and brands are registered and/or common law trademarks of Semiconductor Components Industries, LLC dba “onsemi” or its affiliates and/or subsidiaries in the United States and/or other countries. onsemi owns the rights to a number of patents, trademarks, copyrights, trade secrets, and other intellectual property. A listing of onsemi product/patent coverage may be accessed at www.onsemi.com/site/pdf/Patent-Marking.pdf. onsemi reserves the right to make changes at any time to any products or information herein, without notice. The information herein is provided “as-is” and onsemi makes no warranty, representation or guarantee regarding the accuracy of the information, product features, availability, functionality, or suitability of its products for any particular purpose, nor does onsemi assume any liability arising out of the application or use of any product or circuit, and specifically disclaims any and all liability, including without limitation special, consequential or incidental damages. Buyer is responsible for its products and applications using onsemi products, including compliance with all laws, regulations and safety requirements or standards, regardless of any support or applications information provided by onsemi. “Typical” parameters which may be provided in onsemi data sheets and/ or specifications can and do vary in different applications and actual performance may vary over time. All operating parameters, including “Typicals” must be validated for each customer application by customer’s technical experts. onsemi does not convey any license under any of its intellectual property rights nor the rights of others. -

DRM105, PM Sinusoidal Motor Vector Control with Quadrature
PM Sinusoidal Motor Vector Control with Quadrature Encoder Designer Reference Manual Devices Supported: MCF51AC256 Document Number: DRM105 Rev. 0 09/2008 How to Reach Us: Home Page: www.freescale.com Web Support: http://www.freescale.com/support USA/Europe or Locations Not Listed: Freescale Semiconductor, Inc. Technical Information Center, EL516 2100 East Elliot Road Tempe, Arizona 85284 1-800-521-6274 or +1-480-768-2130 www.freescale.com/support Europe, Middle East, and Africa: Freescale Halbleiter Deutschland GmbH Technical Information Center Information in this document is provided solely to enable system and Schatzbogen 7 software implementers to use Freescale Semiconductor products. There are 81829 Muenchen, Germany no express or implied copyright licenses granted hereunder to design or +44 1296 380 456 (English) fabricate any integrated circuits or integrated circuits based on the +46 8 52200080 (English) information in this document. +49 89 92103 559 (German) +33 1 69 35 48 48 (French) www.freescale.com/support Freescale Semiconductor reserves the right to make changes without further notice to any products herein. Freescale Semiconductor makes no warranty, Japan: representation or guarantee regarding the suitability of its products for any Freescale Semiconductor Japan Ltd. particular purpose, nor does Freescale Semiconductor assume any liability Headquarters arising out of the application or use of any product or circuit, and specifically ARCO Tower 15F disclaims any and all liability, including without limitation consequential or 1-8-1, Shimo-Meguro, Meguro-ku, incidental damages. “Typical” parameters that may be provided in Freescale Tokyo 153-0064 Semiconductor data sheets and/or specifications can and do vary in different Japan applications and actual performance may vary over time. -

United States Patent (19) 11 4,343,223 Hawke Et Al
United States Patent (19) 11 4,343,223 Hawke et al. 45) Aug. 10, 1982 54 MULTIPLESTAGE RAILGUN UCRL-52778, (7/6/79). Hawke. 75 Inventors: Ronald S. Hawke, Livermore; UCRL-82296, (10/2/79) Hawke et al. Jonathan K. Scudder, Pleasanton; Accel. Macropart, & Hypervel. EM Accelerator, Bar Kristian Aaland, Livermore, all of ber (3/72) Australian National Univ., Canberra ACT Calif. pp. 71,90–93. LA-8000-G (8/79) pp. 128, 135-137, 140, 144, 145 73) Assignee: The United States of America as (Marshall pp. 156-161 (Muller et al). represented by the United States Department of Energy, Washington, Primary Examiner-Sal Cangialosi D.C. Attorney, Agent, or Firm-L. E. Carnahan; Roger S. Gaither; Richard G. Besha . - (21) Appl. No.: 153,365 57 ABSTRACT 22 Filed: May 23, 1980 A multiple stage magnetic railgun accelerator (10) for 51) Int. Cl........................... F41F1/00; F41F 1/02; accelerating a projectile (15) by movement of a plasma F41F 7/00 arc (13) along the rails (11,12). The railgun (10) is di 52 U.S. Cl. ....................................... ... 89/8; 376/100; vided into a plurality of successive rail stages (10a-n) - 124/3 which are sequentially energized by separate energy 58) Field of Search .................... 89/8; 124/3; 310/12; sources (14a-n) as the projectile (15) moves through the 73/12; 376/100 bore (17) of the railgun (10). Propagation of energy from an energized rail stage back towards the breech 56) References Cited end (29) of the railgun (10) can be prevented by connec U.S. PATENT DOCUMENTS tion of the energy sources (14a-n) to the rails (11,12) 2,783,684 3/1957 Yoler ...r. -

Vector Control of an Induction Motor Based on a DSP
Vector Control of an Induction Motor based on a DSP Master of Science Thesis QIAN CHENG LEI YUAN Department of Energy and Environment Division of Electric Power Engineering CHALMERS UNIVERSITY OF TECHNOLOGY G¨oteborg, Sweden 2011 Vector Control of an Induction Motor based on a DSP QIAN CHENG LEI YUAN Department of Energy and Environment Division of Electric Power Engineering CHALMERS UNIVERSITY OF TECHNOLOGY G¨oteborg, Sweden 2011 Vector Control of an Induction Motor based on a DSP QIAN CHENG LEI YUAN © QIAN CHENG LEI YUAN, 2011. Department of Energy and Environment Division of Electric Power Engineering Chalmers University of Technology SE–412 96 G¨oteborg Sweden Telephone +46 (0)31–772 1000 Chalmers Bibliotek, Reproservice G¨oteborg, Sweden 2011 Vector Control of an Induction Motor based on a DSP QIAN CHENG LEI YUAN Department of Energy and Environment Division of Electric Power Engineering Chalmers University of Technology Abstract In this thesis project, a vector control system for an induction motor is implemented on an evaluation board. By comparing the pros and cons of eight candidates of evaluation boards, the TMS320F28335 DSP Experimenter Kit is selected as the digital controller of the vector control system. Necessary peripheral and interface circuits are built for the signal measurement, the three-phase inverter control and the system protection. These circuits work appropriately except that the conditioning circuit for analog-to-digital con- version contains too much noise. At the stage of the control algorithm design, the designed vector control system is simulated in Matlab/Simulink with both S-function and Simulink blocks. The simulation results meet the design specifications well. -

Permanent Magnet DC Motors Catalog
Catalog DC05EN Permanent Magnet DC Motors Drives DirectPower Series DA-Series DirectPower Plus Series SC-Series PRO Series www.electrocraft.com www.electrocraft.com For over 60 years, ElectroCraft has been helping engineers translate innovative ideas into reality – one reliable motor at a time. As a global specialist in custom motor and motion technology, we provide the engineering capabilities and worldwide resources you need to succeed. This guide has been developed as a quick reference tool for ElectroCraft products. It is not intended to replace technical documentation or proper use of standards and codes in installation of product. Because of the variety of uses for the products described in this publication, those responsible for the application and use of this product must satisfy themselves that all necessary steps have been taken to ensure that each application and use meets all performance and safety requirements, including all applicable laws, regulations, codes and standards. Reproduction of the contents of this copyrighted publication, in whole or in part without written permission of ElectroCraft is prohibited. Designed by stilbruch · www.stilbruch.me ElectroCraft DirectPower™, DirectPower™ Plus, DA-Series, SC-Series & PRO Series Drives 2 Table of Contents Typical Applications . 3 Which PMDC Motor . 5 PMDC Drive Product Matrix . .6 DirectPower Series . 7 DP20 . 7 DP25 . 9 DP DP30 . 11 DirectPower Plus Series . 13 DPP240 . 13 DPP640 . 15 DPP DPP680 . 17 DPP700 . 19 DPP720 . 21 DA-Series. 23 DA43 . 23 DA DA47 . 25 SC-Series . .27 SCA-L . .27 SCA-S . .29 SC SCA-SS . 31 PRO Series . 33 PRO-A04V36 . 35 PRO-A08V48 . 37 PRO PRO-A10V80 . -

Magnetism Known to the Early Chinese in 12Th Century, and In
Magnetism Known to the early Chinese in 12th century, and in some detail by ancient Greeks who observed that certain stones “lodestones” attracted pieces of iron. Lodestones were found in the coastal area of “Magnesia” in Thessaly at the beginning of the modern era. The name of magnetism derives from magnesia. William Gilbert, physician to Elizabeth 1, made magnets by rubbing Fe against lodestones and was first to recognize the Earth was a large magnet and that lodestones always pointed north-south. Hence the use of magnetic compasses. Book “De Magnete” 1600. The English word "electricity" was first used in 1646 by Sir Thomas Browne, derived from Gilbert's 1600 New Latin electricus, meaning "like amber". Gilbert demonstrates a “lodestone” compass to ER 1. Painting by Auckland Hunt. John Mitchell (1750) found that like electric forces magnetic forces decrease with separation (conformed by Coulomb). Link between electricity and magnetism discovered by Hans Christian Oersted (1820) who noted a wire carrying an electric current affected a magnetic compass. Conformed by Andre Marie Ampere who shoes electric currents were source of magnetic phenomena. Force fields emanating from a bar magnet, showing Nth and Sth poles (credit: Justscience 2017) Showing magnetic force fields with Fe filings (Wikipedia.org.) Earth’s magnetic field (protects from damaging charged particles emanating from sun. (Credit: livescience.com) Magnetic field around wire carrying a current (stackexchnage.com) Right hand rule gives the right sign of the force (stackexchnage.com) Magnetic field generated by a solenoid (miniphyiscs.com) Van Allen radiation belts. Energetic charged particles travel along B lines Electric currents (moving charges) generate magnetic fields but can magnetic fields generate electric currents. -

Discrete and Continuous Model of Three-Phase Linear Induction Motors “Lims” Considering Attraction Force
energies Article Discrete and Continuous Model of Three-Phase Linear Induction Motors “LIMs” Considering Attraction Force Nicolás Toro-García 1 , Yeison A. Garcés-Gómez 2 and Fredy E. Hoyos 3,* 1 Department of Electrical and Electronics Engineering & Computer Sciences, Universidad Nacional de Colombia—Sede Manizales, Cra 27 No. 64 – 60, Manizales, Colombia; [email protected] 2 Unidad Académica de Formación en Ciencias Naturales y Matemáticas, Universidad Católica de Manizales, Cra 23 No. 60 – 63, Manizales, Colombia; [email protected] 3 Facultad de Ciencias—Escuela de Física, Universidad Nacional de Colombia—Sede Medellín, Carrera 65 No. 59A-110, 050034, Medellín, Colombia * Correspondence: [email protected]; Tel.: +57-4-4309000 Received: 18 December 2018; Accepted: 14 February 2019; Published: 18 February 2019 Abstract: A fifth-order dynamic continuous model of a linear induction motor (LIM), without considering “end effects” and considering attraction force, was developed. The attraction force is necessary in considering the dynamic analysis of the mechanically loaded linear induction motor. To obtain the circuit parameters of the LIM, a physical system was implemented in the laboratory with a Rapid Prototype System. The model was created by modifying the traditional three-phase model of a Y-connected rotary induction motor in a d–q stationary reference frame. The discrete-time LIM model was obtained through the continuous time model solution for its application in simulations or computational solutions in order to analyze nonlinear behaviors and for use in discrete time control systems. To obtain the solution, the continuous time model was divided into a current-fed linear induction motor third-order model, where the current inputs were considered as pseudo-inputs, and a second-order subsystem that only models the currents of the primary with voltages as inputs. -

Electrical: 16422
SECTION 16422 – VARIABLE FREQUENCY DRIVES PART 1 - GENERAL 1.01 SUMMARY A. Section Includes: Types of motor controllers, including: 1. Variable Frequency Drives 1.02 DEFINITIONS A. CPT: Control power transformer. B. DDC: Direct digital control. C. EMI: Electromagnetic interference. D. OCPD: Overcurrent protective device. E. PID: Control action, proportional plus integral plus derivative. F. RFI: Radio-frequency interference. G. VFD: Variable-frequency Drive motor controller. 1.03 SUBMITTALS A. Shop Drawings: For each VFD indicated. 1. Include details of equipment assemblies. Indicate dimensions, weights, loads, and required clearances, method of field assembly, components, and location and size of each field connection. 2. Include diagrams for power, signal, and control wiring. 3. Provide manufacturer recommended spare parts list in with submittal. 4. Installation and Maintenance manuals shall be shipped with the VFD and shall be in electronic format. Include website, detailed installation, start-up, and checkout procedures, adjustment and troubleshooting information, and related closeout documents. Provide OWNER with 3 copies each on separate, clearly labeled jump drives, one jump drive to be housed onsite. 5. Submit evidence that the equipment will be provided with all specified controls, features, options and accessories. 6. Submit certification that the equipment is designed and manufactured in conformance with all applicable codes and standards. 7. Certified copies of test results shall be submitted for tests specified in this section, including but not all inclusive, manufacturer startup. 8. Submit warranty information for equipment. Warranties to start from date of startup. Manufacturer startup certificate may extend warranty, if so provide new warranty update to OWNER. 1.04 CLOSEOUT SUBMITTALS 16422-1 A. -

DC Motor Workshop
DC Motor Annotated Handout American Physical Society A. What You Already Know Make a labeled drawing to show what you think is inside the motor. Write down how you think the motor works. Please do this independently. This important step forces students to create a preliminary mental model for the motor, which will be their starting point. Since they are writing it down, they can compare it with their answer to the same question at the end of the activity. B. Observing and Disassembling the Motor 1. Use the small screwdriver to take the motor apart by bending back the two metal tabs that hold the white plastic end-piece in place. Pull off this plastic end-piece, and then slide out the part that spins, which is called the armature. 2. Describe what you see. 3. How do you think the motor works? Discuss this question with the others in your group. C. Mounting the Armature 1. Use the diagram below to locate the commutator—the split ring around the motor shaft. This is the armature. Shaft Commutator Coil of wire (electromagnetic) 2. Look at the drawing on the next page and find the brushes—two short ends of bare wire that make a "V". The brushes will make electrical contact with the commutator, and gravity will hold them together. In addition the brushes will support one end of the armature and cradle it to prevent side- to-side movement. 1 3. Using the cup, the two rubber bands, the piece of bare wire, and the three pieces of insulated wire, mount the armature as in the diagram below. -

Electric Vehicle Modeling Utilizing DC Motor Equations
1 Electric Vehicle Modeling Utilizing DC Motor Equations Clay S. Hearn, Damon A. Weeks, Richard C. Thompson, and Dongmei Chen Abstract— This paper discusses modeling an electric utility vehicle powered by a separately wound DC motor. Many modeling techniques use steady state efficiency maps and torque- speed curves to describe the performance of electric motors, which can overlook transient response dynamics, current limits, and thermal limits that may affect the end vehicle performance. This paper discusses using bond-graph techniques to develop a causal model of an electric vehicle powered by a separately wound DC motor and development of the appropriate feed- forward and feed-back controllers required for route following. The causal model performance is compared to a PSAT model of the same electric vehicle, which uses motor torque-speed curve and efficiency map. Fig. 1. Columbia ParCar SUV-LN electric utility vehicle Index Terms—dc motors, PSAT, bond graphs, modeling, and for particular applications. The Center for Electromechanics electric vehicle has successfully used PSAT in the past to predict on-route energy usage of a plug-in hydrogen fuel cell shuttle bus. I. INTRODUCTION Tuned PSAT model predictions of energy consumption matched data collected from on-road testing to within 5% [1]. ll electric utility vehicles such as the Columbia ParCar PSAT is considered a forward looking model since a A SUV-LN, shown in Figure 1, are used in a wide variety controlled drive torque demand is used to control the vehicle of industrial and commercial applications where tools, following a particulate route. From the motor torque and equipment, and personnel need to be transported efficiently vehicle speed, quasistatic model techniques are used to track with zero emissions. -
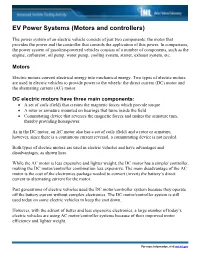
EV Power Systems (Motors and Controllers)
EV Power Systems (Motors and controllers) The power system of an electric vehicle consists of just two components: the motor that provides the power and the controller that controls the application of this power. In comparison, the power system of gasoline-powered vehicles consists of a number of components, such as the engine, carburetor, oil pump, water pump, cooling system, starter, exhaust system, etc. Motors Electric motors convert electrical energy into mechanical energy. Two types of electric motors are used in electric vehicles to provide power to the wheels: the direct current (DC) motor and the alternating current (AC) motor. DC electric motors have three main components: • A set of coils (field) that creates the magnetic forces which provide torque • A rotor or armature mounted on bearings that turns inside the field • Commutating device that reverses the magnetic forces and makes the armature turn, thereby providing horsepower. As in the DC motor, an AC motor also has a set of coils (field) and a rotor or armature, however, since there is a continuous current reversal, a commutating device is not needed. Both types of electric motors are used in electric vehicles and have advantages and disadvantages, as shown here. While the AC motor is less expensive and lighter weight, the DC motor has a simpler controller, making the DC motor/controller combination less expensive. The main disadvantage of the AC motor is the cost of the electronics package needed to convert (invert) the battery‘s direct current to alternating current for the motor. Past generations of electric vehicles used the DC motor/controller system because they operate off the battery current without complex electronics.