Vision-Based Mobile Free-Space Optical Communications Kyle Cavorley, Wayne Chang, Jonathan Giordano, Taichi Hirao Advisor: Prof
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Unit 7: Choosing Communication Channels
UNIT 7: CHOOSING COMMUNICATION CHANNELS Unit 7 highlights the importance of selecting an appropriate channel mix for a communication response and describes five categories of communication channels: mass media, mid media, print media, social and digital media and interpersonal communication (IPC). For each of these channels, advantages and disadvantages have been listed, as well as situations in which different channels may be used. Although this Unit has attempted to differentiate the channels and their uses for simplicity, there is recognition that channels frequently overlap and may be effective for achieving similar objectives. This is why the match between channel, audience and communication objective is important. This unit provides some tools to help assess available and functioning channels during an emergency, as well as those that are more appropriate for reaching specific audience segments. Once you have completed this unit, you will have the following tools to support the development of your SBCC response: • Worksheet 7.1: Assessing Available Communication Channels • Worksheet 7.2: Matching Communication Channels to Primary and Influencing Audiences What Is a Communication Channel? A communication channel is a medium or method used to deliver a message to the intended audience. A variety of communication channels exist, and examples include: • Mass media such as television, radio (including community radio) and newspapers • Mid media activities, also known as traditional or folk media such as participatory theater, public talks, announcements through megaphones and community-based surveillance • Print media, such as posters, flyers and leaflets • Social and digital media such as mobile phones, applications and social media • IPC, such as door-to-door visits, phone lines and discussion groups Different channels are appropriate for different audiences, and the choice of channel will depend on the audience being targeted, the messages being delivered and the context of the emergency. -

Modeling and Simulation of an Asynchronous Digital Subscriber Line Transceiver Data Transmission Subsystem
Modeling and Simulation of an Asynchronous Digital Subscriber Line Transceiver Data Transmission Subsystem Elmustafa Erwa ABSTRACT Recently, there has been an increase in demand for digital services provided over the public telephone line network. Asymmetric digital subscriber line (ADSL) transmit high bit rate data in the forward direction to the subscriber, and lower bit rate data in the reverse direction to the central office, both on a single copper telephone loop. I implemented a Synchronous Dataflow (SDF) model for an ADSL transceiver’s data transmission subsystem in LabVIEW. My implementation enables designers to simulate and optimize different ADSL transceiver designs. The overall implementation is compliant with the European Telecommunications Standards Institute’s ADSL specification. 1. INTRODUCTION With the emergence of the Internet as the cornerstone of communications in this age, the demand for high speed Internet access has only been increasing. Asymmetric digital subscriber lines (ADSL) is one of the technologies that provide high-speed Internet access in residences and offices [1]. It facilitates the use of normal telephone services, Integrated Services Digital Network (ISDN), and high-speed data transmission simultaneously. Hence, bandwidth-demanding technologies, such as video-conferencing and video-on-demand, are enabled over ordinary telephone lines. ADSL standards use discrete multi-tone (DMT) modulation [2]. DMT divides the effectively bandlimited communication channel into a larger number of orthogonal narrowband subchannels. This allows for maximizing the transmitted bit rate and adapting to changing line conditions. Designing ADSL systems is inherently complex. However, advances in the digital signal processor (DSP) technology allowed programmable DSP based solutions to replace application-specific integrated circuit based implementations. -

2 the Wireless Channel
CHAPTER 2 The wireless channel A good understanding of the wireless channel, its key physical parameters and the modeling issues, lays the foundation for the rest of the book. This is the goal of this chapter. A defining characteristic of the mobile wireless channel is the variations of the channel strength over time and over frequency. The variations can be roughly divided into two types (Figure 2.1): • Large-scale fading, due to path loss of signal as a function of distance and shadowing by large objects such as buildings and hills. This occurs as the mobile moves through a distance of the order of the cell size, and is typically frequency independent. • Small-scale fading, due to the constructive and destructive interference of the multiple signal paths between the transmitter and receiver. This occurs at the spatialscaleoftheorderofthecarrierwavelength,andisfrequencydependent. We will talk about both types of fading in this chapter, but with more emphasis on the latter. Large-scale fading is more relevant to issues such as cell-site planning. Small-scale multipath fading is more relevant to the design of reliable and efficient communication systems – the focus of this book. We start with the physical modeling of the wireless channel in terms of elec- tromagnetic waves. We then derive an input/output linear time-varying model for the channel, and define some important physical parameters. Finally, we introduce a few statistical models of the channel variation over time and over frequency. 2.1 Physical modeling for wireless channels Wireless channels operate through electromagnetic radiation from the trans- mitter to the receiver. -

Designing Asymmetric Digital Subscriber Line with Discrete Multitone Modulator
ISSN (Online) 2321-2004 IJIREEICE ISSN (Print) 2321-5526 International Journal of Innovative Research in Electrical, Electronics, Instrumentation and Control Engineering Vol. 7, Issue 11, November 2019 Designing Asymmetric Digital Subscriber Line with Discrete Multitone Modulator Attiq Ul Rehman1, Maninder Singh2 M. Tech., Student, ECE Department, Haryana Engineering College, Jagadhri, Haryana, India1 Assistant Professor, ECE Department, Haryana Engineering College, Jagadhri, Haryana, India2 Abstract: The objective of Digital Subscriber Line (DSL) is to propagate signal from the transmitter to the receiver over telephone lines. In communication industry Asymmetric Digital Subscriber Line (ADSL) is widely used because it can handle both phone services and internet access services at same time. As the communication industry develops, its main concern is to maximize the user handling capacity of communication systems. For this purpose, ADSL uses Discrete Multitone (DMT) modulator with QAM bank. But as the number of users increases the system complexity and interference also increases. The communication channel is not free from the effects of channel impairments such as noise, interference and fading. These channel impairments caused signal distortion and Signal to Ratio (SNR) degradation. One method that can be implemented to overcome this problem is by introducing channel coding. Channel encoding is applied by adding redundant bits to the transmitted data. The redundant bits increase raw data used in the link and therefore, increase the bandwidth requirement. So, if noise or fading occurred in the channel, some data may still be recovered at the receiver. While at the receiver, channel decoding is used to detect or correct errors that are introduced to the channel. -

The Wireless Communication Channel Objectives
9/9/2008 The Wireless Communication Channel muse Objectives • Understand fundamentals associated with free‐space propagation. • Define key sources of propagation effects both at the large‐ and small‐scales • Understand the key differences between a channel for a mobile communications application and one for a wireless sensor network muse 1 9/9/2008 Objectives (cont.) • Define basic diversity schemes to mitigate small‐scale effec ts • Synthesize these concepts to develop a link budget for a wireless sensor application which includes appropriate margins for large‐ and small‐scale pppgropagation effects muse Outline • Free‐space propagation • Large‐scale effects and models • Small‐scale effects and models • Mobile communication channels vs. wireless sensor network channels • Diversity schemes • Link budgets • Example Application: WSSW 2 9/9/2008 Free‐space propagation • Scenario Free-space propagation: 1 of 4 Relevant Equations • Friis Equation • EIRP Free-space propagation: 2 of 4 3 9/9/2008 Alternative Representations • PFD • Friis Equation in dBm Free-space propagation: 3 of 4 Issues • How useful is the free‐space scenario for most wilireless syst?tems? Free-space propagation: 4 of 4 4 9/9/2008 Outline • Free‐space propagation • Large‐scale effects and models • Small‐scale effects and models • Mobile communication channels vs. wireless sensor network channels • Diversity schemes • Link budgets • Example Application: WSSW Large‐scale effects • Reflection • Diffraction • Scattering Large-scale effects: 1 of 7 5 9/9/2008 Modeling Impact of Reflection • Plane‐Earth model Fig. Rappaport Large-scale effects: 2 of 7 Modeling Impact of Diffraction • Knife‐edge model Fig. Rappaport Large-scale effects: 3 of 7 6 9/9/2008 Modeling Impact of Scattering • Radar cross‐section model Large-scale effects: 4 of 7 Modeling Overall Impact • Log‐normal model • Log‐normal shadowing model Large-scale effects: 5 of 7 7 9/9/2008 Log‐log plot Large-scale effects: 6 of 7 Issues • How useful are large‐scale models when WSN lin ks are 10‐100m at bt?best? Fig. -

Telecommunication Through Broadband Services of Bsnl: a Bird’S Eye View
International Journal of Technical Research and Applications e-ISSN: 2320-8163, www.ijtra.com Volume 1, Issue 2 (may-june 2013), PP. 37-41 TELECOMMUNICATION THROUGH BROADBAND SERVICES OF BSNL: A BIRD’S EYE VIEW Dr Shilpi Verma Assistant Professor Deptt. of Library & information Science (School for Information Science & Technology) Babasaheb Bhimrao Ambedkar University (A Central University) Vidya Vihar, Rai-bareli Road Lucknow-226025 (UP) Abstract: In the cut throat competition every country telecommunication technologies are playing very vital want to be information equipped, the role. The consumers or users are demanding for faster and telecommunication is helping a lot in achieving the reliable bandwidth for purpose of e-commerce, same. Integrated communication is emerged as a boom videoconferencing, information retrieval and such other in communication world. The growth of data, applications. Broadband seems as a answer to these communication market and the networking questions. Broadband provides means of accessing technology trend has amplified the importance of technologies to bridge the customer & the service telecommunication in the field of information provider throughout the world. It basically provides high communication. Telecommunication has become one speed internet access, whereas the dial up connections of the very important part that is very essential to the was having their limitations and low speed. These socio-economic well being of any nation. The paper broadband services allow the user to send or receive video deals with concept of Broad band services of BSNL, or audio digital content and having real time features also. technology options for broadband services. Bharat It is able to provide interactive services. -

Multi-User Signal and Spectra Co-Ordination for Digital Subscriber Lines
KATHOLIEKE UNIVERSITEIT LEUVEN FACULTEIT TOEGEPASTE WETENSCHAPPEN DEPARTEMENT ELEKTROTECHNIEK Kasteelpark Arenberg 10, 3001 Heverlee MULTI-USER SIGNAL AND SPECTRA CO-ORDINATION FOR DIGITAL SUBSCRIBER LINES Promotor: Proefschrift voorgedragen tot Prof. Dr. ir. M. Moonen het behalen van het doctoraat in de toegepaste wetenschappen door Raphael CENDRILLON December 2004 KATHOLIEKE UNIVERSITEIT LEUVEN FACULTEIT TOEGEPASTE WETENSCHAPPEN DEPARTEMENT ELEKTROTECHNIEK Kasteelpark Arenberg 10, 3001 Heverlee MULTI-USER SIGNAL AND SPECTRA CO-ORDINATION FOR DIGITAL SUBSCRIBER LINES Jury: Proefschrift voorgedragen tot Prof. Dr. ir. G. De Roeck, voorzitter het behalen van het doctoraat Prof. Dr. ir. M. Moonen, promotor in de toegepaste wetenschappen Prof. Dr. ir. G. Gielen door Prof. Dr. ir. S. McLaughlin (U. Edinburgh, U.K.) Prof. Dr. ir. B. Preneel Raphael CENDRILLON Prof. Dr. ir. L. Vandendorpe (U.C.L.) Prof. Dr. ir. J. Vandewalle Prof. Dr. ir. S. Vandewalle U.D.C. 621.391.827 December 2004 c Katholieke Universiteit Leuven - Faculteit Toegepaste Wetenschappen Arenbergkasteel, B-3001 Heverlee (Belgium) Alle rechten voorbehouden. Niets uit deze uitgave mag vermenigvuldigd en/of openbaar gemaakt worden door middel van druk, fotocopie, microfilm, elektron- isch of op welke andere wijze ook zonder voorafgaande schriftelijke toestemming van de uitgever. All rights reserved. No part of the publication may be reproduced in any form by print, photoprint, microfilm or any other means without written permission from the publisher. D/2004/7515/88 ISBN 90-5682-550-X Acknowledgement I would like to thank my family for all the support and love they have given me over the years. My parents have always believed in me and this taught me to believe in myself. -

Communications Channels (Based on Blahut's Digital Transmission Of
Communications Channels (Based on Blahut’s Digital Transmission of Information) The transfer of messages between individuals or between cells is an activity that is fundamental to all forms of life, and in biological systems, delicate mechanisms have evolved to support this message transfer. Each of these messages traverses an environment capable of producing various kinds of distortion in the message, but the message must be understood despite this distortion. Yet, the method of message transmission must not be so complex as to unduly exhaust the resources of the transmitter or the receiver. Man-made communication systems also transfer data through a noisy environment. This environment is called a communication channel. A very important channel is the one in which a message is represented by an electromagnetic wave that is sent to a receiver, where it appears contaminated by noise. The transmitted messages must be protected against distortion and noise in the channel. The first such communication systems protected their messages from the environment by the simple expedient of transmitting high power. Later, message design techniques were introduced that led to the development of far more sophisticated communication systems. Modern message design is the art of piecing together a number of waveform ideas to meet a set of requirements: generally, to transmit as many bits as is practical within the available power and bandwidth. It is by the performance at low transmitted power that one judges the quality of a digital communication system. The purpose of this course is to develop in a rigorous mathematical setting the modem waveform techniques for the digital transmission of information. -

Wireless and Mobile Communication Multiple Access Techniques for Wireless Communication
WIRELESS AND MOBILE COMMUNICATION MULTIPLE ACCESS TECHNIQUES FOR WIRELESS COMMUNICATION In telecommunications and computer networks, a channel access method or multiple access method allows several terminals connected to the same multi-point transmission medium to transmit over it and to share its capacity.[1] Examples of shared physical media are wireless networks, bus networks, ring networks and point-to-point links operating in half-duplex mode. A channel access method is based on multiplexing, that allows several data streams or signals to share the same communication channel or transmission medium. In this context, multiplexing is provided by the physical layer. There are three common types of multiple access system: 1. Frequency Division Multiple Access (FDMA) 2. Time Division Multiple Access (TDMA) 3. Code Division Multiple Access (CDMA) Frequency Division Multiple Access (FDMA) The frequency-division multiple access(FDMA) channel-access scheme is based on the frequency-division multiplexing (FDM) scheme, which provides different frequency bands to different data-streams. In the FDMA case, the data streams are allocated to different nodes or devices. An example of FDMA systems were the first-generation (1G) cell-phone systems, where each phone call was assigned to a specific uplink frequency channel, and another downlink frequency channel. Each message signal (each phone call) is modulated on a specific carrier frequency. FDMA Time Division Multiple Access (TDMA) The time division multiple access (TDMA) channel access scheme is based on the time-division multiplexing (TDM) scheme, which provides different time-slots to different data-streams (in the TDMA case to different transmitters) in a cyclically repetitive frame structure. -

In Telecommunications and Computer Networks, a Channel Access Method
In telecommunications and computer networks, a channel access method or multiple access method allows several terminals connected to the same multi-point transm ission medium to transmit over it and to share its capacity. Examples of shared physical media are wireless networks, bus networks, ring networks and half-duple x point-to-point links. A channel-access scheme is based on a multiplexing method, that allows several d ata streams or signals to share the same communicatcommunicationion channel or physical mediu m. Multiplexing is in this context provided by the physical layer. Note that mul tiplexing also may be used in full-duplex point-to-point communication between n odes in a switched network, which should not be conconsideredsidered as multiple access. A channel-access scheme is also based on a multiple access protocol and control suesmechanism, such as also addressing, known as assigningmedia access multiplex control channe (MAC).ls This to different protocol dealsusers, with and isav oiding collisions. The MAC-layer is a sub-layer in Layer 2 (Data Link Layer) of the OSI model and a component of the Link Layer of the TCP/IP model. Contents [hide] 1 Fundamental types of channel access schemes 1.1 Frequency Division Multiple Access (FDMA) 1.2 Time division multiple access (TDMA) 1.3 Code division multiple access (CDMA)/Spread spespectrumctrum multiple access (SSMA) 1.4 Space division multiple access (SDMA) 2 List of channel access methods 2.1 Circuit mode and channelization methods 2.2 Packet mode methods 2.3 Duplexing methods -

Communication Channel Models
Communication channel model Goal The goal of this experiment is to become familiar with the definition of channel model and the effect of the channel model on the transmitted signal both in the time and the frequency domain. Theory Communicating data from one location to another requires some form of pathway or medium. These pathways, called communication channels, use two types of media: cable (twisted-pair wire, cable, and fiber-optic cable) and broadcast (microwave, satellite, radio, and infrared). Cable or wire line media use physical wires of cables to transmit data and information. Twisted-pair wire and coaxial cables are made of copper, and fiber-optic cable is made of glass. The simplified block diagram of any communication system can be presented by Figure 1: Transmitter Channel Receiver Noise Figure 1. Block diagram of communication systems As it is seen in Figure 1, in order to model the whole transmission environment, the transmitted signal first passes through the channel and then, noise is added to the signal. In communication systems, noise is an error or undesired random disturbance of a useful information signal in a communication channel. The noise is a summation of unwanted or disturbing energy from natural and sometimes man-made sources. Noise is, however, typically distinguished from interference, for example in the signal-to-noise ratio (SNR), signal-to-interference ratio (SIR) and signal-to- noise plus interference ratio (SNIR) measures. Noise is also typically distinguished from distortion, which is an unwanted systematic alteration of the signal waveform by the communication equipment, for example in the signal-to-noise and distortion ratio (SINAD). -
Module 8: Design of a Simple Communication System Part 2
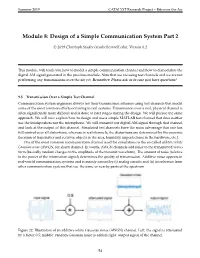
Summer 2019 CATALYST Research Project – Bits over the Air Module 8: Design of a Simple Communication System Part 2 © 2019 Christoph Studer ([email protected]); Version 0.2 This module will teach you how to model a simple communication channel and how to demodulate the digital AM signal generated in the previous module. Note that we are using test channels and we are not performing any transmissions over-the-air yet. Remember: Please ask us in case you have questions! 9.5 Transmission Over a Simple Test Channel Communication system engineers always test their transmission schemes using test channels that model some of the most common effects occurring in real systems. Transmission over a real, physical channel is often significantly more difficult and is done at later stages during the design. We will pursue the same approach. We will now explain how to design and use a simple MATLAB test channel that does neither use the loudspeakers nor the microphone. We will transmit our digital AM signal through that channel and look at the output of this channel. Simulated test channels have the main advantage that one has full control over all distortions, whereas in real channels, the distortions are determined by the scenario (location of transmitter and receiver, objects in the area, humidity, imperfections in the hardware, etc.). One of the most common communication channel used for simulations is the so-called additive white Gaussian noise (AWGN, for short) channel. In words, AWGN channels add noise to the transmitted wave- form (basically random changes to the amplitude of the transmit waveform).