Modelling Bicycle Infrastructure in SUMO
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Training Course Non-Motorised Transport Author
Division 44 Environment and Infrastructure Sector Project „Transport Policy Advice“ Training Course: Non-motorised Transport Training Course on Non-motorised Transport Training Course Non-motorised Transport Author: Walter Hook Findings, interpretations and conclusions expressed in this document are based on infor- Editor: mation gathered by GTZ and its consultants, Deutsche Gesellschaft für partners, and contributors from reliable Technische Zusammenarbeit (GTZ) GmbH sources. P.O. Box 5180 GTZ does not, however, guarantee the D-65726 Eschborn, Germany accuracy or completeness of information in http://www.gtz.de this document, and cannot be held responsible Division 44 for any errors, omissions or losses which Environment and Infrastructure emerge from its use. Sector Project „Transport Policy Advice“ Commissioned by About the author Bundesministerium für wirtschaftliche Zusammenarbeit und Entwicklung (BMZ) Walter Hook received his PhD in Urban Friedrich-Ebert-Allee 40 Planning from Columbia University in 1996. D-53113 Bonn, Germany He has served as the Executive Director of the http://www.bmz.de Institute for Transportation and Development Policy (ITDP) since 1994. He has also served Manager: as adjunct faculty at Columbia University’s Manfred Breithaupt Graduate School of Urban Planning. ITDP is a non-governmental organization dedicated to Comments or feedback? encouraging and implementing We would welcome any of your comments or environmentally sustainable transportation suggestions, on any aspect of the Training policies and projects in developing countries. Course, by e-mail to [email protected], or by surface mail to: Additional contributors Manfred Breithaupt This Module also contains chapters and GTZ, Division 44 material from: P.O. Box 5180 Oscar Diaz D-65726 Eschborn Michael King Germany (Nelson\Nygaard Consulting Associates) Cover Photo: Dr. -
Traffic-Light Intersections
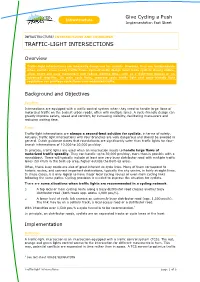
Give Cycling a Push Infrastructure Implementation Fact Sheet INFRASTRUCTURE/ INTERSECTIONS AND CROSSINGS TRAFFIC-LIGHT INTERSECTIONS Overview Traffic-light intersections are inherently dangerous for cyclists. However, they are indispensable when cyclists cross heavy traffic flows. Cycle-friendly design must make cyclists clearly visible, allow short and easy maneuvers and reduce waiting time, such as a right-turn bypass or an advanced stop-line. On main cycle links, separate cycle traffic light and cycle-friendly light regulation can privilege cycle flows over motorized traffic. Background and Objectives Function Intersections are equipped with a traffic control system when they need to handle large flows of motorized traffic on the busiest urban roads, often with multiple lanes. A cycle-friendly design can greatly improve safety, speed and comfort, by increasing visibility, facilitating maneuvers and reducing waiting time. Scope Traffic-light intersections are always a second-best solution for cyclists, in terms of safety. Actually, traffic light intersections with four branches are very dangerous and should be avoided in general. Dutch guidance states that roundabouts are significantly safer than traffic lights for four- branch intersections of 10,000 to 20,000 pcu/day. In practice, traffic lights are used when an intersection needs to handle large flows of motorized traffic speedily. They can handle up to 30,000 pcu/day, more than is possible with a roundabout. These will typically include at least one very busy distributor road with multiple traffic lanes (50 km/h in the built-up area, higher outside the built-up area). Often, these busy roads are also of great interest as cycle links. -
“Road Space Re-Allocation – Streets As Contested Spaces”
Road space re-allocation Streets as contested spaces The findings reported in this deliverable reflect the state of knowledge up to their first submission date. A revised version will be submitted in August 2021 that will include more recent material. Start date of 1st September Duration: 36 months project: 2018 Version: 1 Prepared by: Charlotte Halpern, Francesco Sarti (Sciences Po, CEE), Jenny McArthur (UCL) Checked by: Peter Jones (UCL) Verified by: X Status: x Dissemination PU/CO level: The sole responsibility for the content of this document lies with the authors. It does not necessarily reflect the opinion of the European Union. Neither INEA nor the European Commission are responsible for any use that may be made of the information contained therein. This project has received funding from the European Union's Horizon 2020 research and innovation programme under grant agreement No 769276 Summary This report is the third WP2 deliverable. Drawing on the work done on the organizational, institutional, regulatory and political dimensions of road space allocation, it focuses on the contestation of street space. By purposefully using the notion of contestation, it sets out to identify various views on how space should be allocated across different transport modes and non-transport activities, as well as the various ways through which they are made material. Who has an interest in contesting road space arrangements or proposed changes? What are these claims about? How are they mobilized? To what extent are these claims channelled by formal consultation and decision-making processes? What similarities can be found across cities? How are these views represented at EU level? Drawing on an original qualitative dataset, the report includes an up-to- date analysis of how the contestation of street space enfolds across five cities - London, Constanta, Malmö, Lisbon and Budapest - and at EU level. -
Supplement: Design Guidelines
Greeley Bicycle Master Plan SUPPLEMENT: DESIGN GUIDELINES CHAPTER OUTLINE: Overview The sections that follow serve as an inventory of bicycle design treatments and provide OVERVIEW guidelines for their development. These treatments and design guidelines are important because they represent the tools for creating a bicycle-friendly, safe, accessible community. DESIGN NEEDS OF The guidelines are not, however, a substitute for a more thorough evaluation by a landscape BICYCLISTS architect or engineer upon implementation of facility improvements. Some improvements may also require cooperation with the Colorado DOT for specific design solutions. The following SHARED ROADWAYS standards and guidlines are referred to in this guide. BICYCLE BOULEVARDS • The Federal Highway Administration’s Manual on Uniform Traffic Control Devices SEPARATED BIKEWAYS (MUTCD) is the primary source for guidance on lane striping requirements, signal warrants, and recommended signage and pavement markings. PROTECTED BIKE LANES • American Association of State Highway and Transportation Officials (AASHTO) Guide SEPARATED BIKEWAYS for the Development of Bicycle Facilities, updated in June 2012 provides guidance AT INTERSECTIONS on dimensions, use, and layout of specific bicycle facilities. SIGNALIZATION • The National Association of City Transportation Officials’ (NACTO) 2012 Urban Bikeway Design Guide is the newest publication of nationally recognized bikeway BIKEWAY SIGNING design standards, and offers guidance on the current state of the practice designs. All of the -

Bicycle Facilities Planning
Bicycle Facilities Planning Overview Bicycle facilities range from conventional bike lanes to coordinated way finding systems, all acting to improve the safety and comfort of bicyclists. This module will review different types of facilities available to jurisdictions to improve their bikeway network. They are drawn from international best practices and this module give an overview of when and how they can be used. There are two separate lectures, one focused on types of facilities and the second focused on bike parking only. Learning Objective: Identify the needs of different types of cyclists Compare types of facilities that are available in a bikeway network Judge which types of facilities are appropriate in different environments Suggested Use _x_Professional Development _x_Graduate Level _x_Undergraduate Time Required __Less than 1 hour __ 1 hour __2-3 hours _x_Half-day Workshop __Full-day Workshop Instructions 1. Announce purposes and give brief overview of the day 2. Give lecture 3. Summarize lecture and discussion 4. Assignment 5. Circulate handouts and evaluations Lecture “Bicycle Facilities Planning” 1. Types of Cyclists 2. Purpose for Riding 3. Types of Facilities a. Bike Lanes b. Bicycle Boulevards (Neighborhood Greenways) c. Cycle Tracks d. Intersections e. Signals f. Signing and Marking 4. Discussion “Bicycle Facilities: Parking” 1. Why Parking? 2. Long term vs. short term 3. Types of racks 4. Placement & installation 5. Other facilities 6. International examples 7. Discussion Materials/Handouts Bike Boulevard Design Assignments and Activities 1. Bike Boulevard Audit 2. Code write up for parking types 3. Op/Ed piece for facility type in community Suggested Readings “Evaluation of Bike Boxes at Signalized Intersections.” (2010) Jennifer Dill. -

Safe Routes to School Street Design Toolkit
STREET DESIGN TOOLKIT r program deliver ou y an THE ‘SIX E’S’ OF r in d s INTRODUCTION to ha ac rin Portland’s Safe Routes to School f g g o SAFE ROUTES in f (SRTS) initiative envisions a future d r i e where all students and families u s Our Portland SRTS initiative g o e u can choose walking and biking uses a comprehensive “six E” h r t c as safe, convenient, accessible, approach, with our commitment e is s and healthy options for getting to y to equity serving as an overarching t i and from school and around their principle (like an umbrella!). u EQUITY q neighborhoods. E The engineering treatments within This Toolkit gives a basic overview this document are important and of the most common safety essential to improving safety and tools the Portland Bureau of comfort for families across Portland. Transportation (PBOT) uses on However, they require the other “E’s” streets around schools. These for a truly well-rounded approach. ENGINEERING design tools make Portland’s ENFORCEMENT streets safer for walking and As the needs of every community biking, with a special focus are unique, individual schools EDUCATION on supporting kids walking may require more emphasis and biking to school. on different components. EVALUATION Each local safety challenge must ENCOURAGEMENT be evaluated individually, and may include solutions beyond those included in the Toolkit. All SRTS projects will be designed using applicable City, State and Federal design EQUITY ENCOURAGEMENT manuals and guidelines. Distribute resources Activities to promote walking, equitably to reduce health biking, and rolling to school and wealth disparities EDUCATION EVALUATION Transportation safety & skills Student travel surveys and education in the classroom program assessment ENFORCEMENT ENGINEERING Partnership with Portland Improvements to streets, signs, Police to reduce speeding and signals around schools around schools Cover photo by ODOT Photo/Video 2018 3 COMMON SAFETY TOOLS USING THIS TOOLKIT These are the common safety tools explained throughout the Toolkit. -
Sustrans Design Manual Chapter 7 Junctions and Crossings: Cycle Friendly Design (Draft)
Sustrans Design Manual • Chapter 7: Junctions and crossings: cycle friendly design (draft) Sustrans Design Manual Chapter 7 Junctions and crossings: cycle friendly design (draft) February 2015 February 2015 1 Sustrans Design Manual • Chapter 7: Junctions and crossings: cycle friendly design (draft) Contents This chapter of the Sustrans Design Manual should be read 7. Crossings in conjunction with Chapter 1 “Principles and processes for General Principles and Guidance 42 cycle friendly design.” That chapter includes key guidance Cycle priority crossings 46 on core design principles, whether to integrate with or segregate from motor traffic, the space required by cyclists Uncontrolled crossings 48 and other road users as well as geometrical considerations. Types of controlled crossing 52 Readers are also directed towards the “Handbook for Signalised crossings 54 cycle-friendly design” which contains a concise illustrated Grade separated crossings 58 compendium of the technical guidance contained in the Design Manual. This chapter has initially been issued as a draft and it is intended that it be reviewed during 2015; 8. Interface with carriageway feedback on the content is invited and should be made by Overview 59 31 May 2015 to [email protected] Low angle merge and diverge facilities 60 1. Key Principles 3 Perpendicular (or high angle) transitions 62 2. Introduction 4 Culs-de-sac and road closures 65 3. General Principles and Guidance 4 Flush Kerbs 65 4. Priority Junctions 9. References 67 Overview 8 Raised table junctions 10 Modifying existing junction geometry 12 About Sustrans 5. Signalised junctions Sustrans makes smarter travel choices possible, General considerations 14 desirable and inevitable. -

Jefferson Parish Bicycle Master Plan Appendices
◊ ◊ ◊ ◊ ◊ o o o o o o o o o o o o - - Gretna Boulevard Existing Conditions From Stumpf to Belle Chasse P P P P 9’ 11’ 40’ 11’ 9’ PARKING TRAVEL LANE LANDSCAPED MEDIAN TRAVEL LANE PARKING 80’ Pavement Width Gretna Boulevard Buffered Bike Lanes From Stumpf to Belle Chasse 6’ 3’ 11’ 40’ 11’ 3’ 6’ BIKE LANE TRAVEL LANE LANDSCAPED MEDIAN TRAVEL LANE BIKE LANE 80’ Pavement Width Gretna Boulevard Existing Conditions From Belle Chasse to Manhattan 12’ 12’ 30’ 12’ 12’ TRAVEL LANE TRAVEL LANE LANDSCAPED MEDIAN TRAVEL LANE TRAVEL LANE 78’ Pavement Width Gretna Boulevard Bike Lanes From Belle Chasse to Manhattan P P P P 8’ 6’ 10’ 30’ 10’ 6’ 8’ PARKING BIKE LANE TRAVEL LANE LANDSCAPED MEDIAN TRAVEL LANE BIKE LANE PARKING 78’ Pavement Width Bonnabel Boulevard Existing Conditions From Lakefront Trail to Metarie Rd P P P P 9’ 11’ 11’ 40’ 11’ 11’ 9’ PARKING TRAVEL LANE TRAVEL LANE LANDSCAPED MEDIAN TRAVEL LANE TRAVEL LANE PARKING 102’ Pavement Width Bonnabel Boulevard Buffered Bike Lanes From Lakefront Trail to Metarie Rd Reallocate Parking Lane 6’ 3’ 11’ 11’ 40’ 11’ 11’ 3’ 6’ BIKE LANE TRAVEL LANE TRAVEL LANE LANDSCAPED MEDIAN TRAVEL LANE TRAVEL LANE BIKE LANE 102’ Pavement Width Bonnabel Boulevard Buffered Bike Lanes From Lakefront Trail to Metarie Rd P Reallocate Travel Lane P P P 9’ 6’ 3’ 13’ 40’ 13’ 3’ 6’ 9’ PARKING BIKE LANE TRAVEL LANE LANDSCAPED MEDIAN TRAVEL LANE BIKE -

In the Nymtcregion
New York Metropolitan Transportation Council Pedestrian Safety in the NYMTC Region Prepared by CUNY Institute for Transportation Systems September 2007 NYMTC Pedestrian Safety Study Final Report Prepared by Claire E. McKnight Kyriacos Mouskos Camille Kamga Institute for Transportation Systems City University of New York Region 2, University Transportation Research Center And Chris Hardej Aizaz Ahmed Safety Advisory Work Group Advisors New York Metropolitan Transportation Council Prepared for New York Metropolitan Transportation Council July 2007 Disclaimer The contents of this report reflect the views of those interviewed as interpreted by the authors except where specified. The authors are responsible for the facts, data, and analyses presented herein. The contents do not necessarily reflect the official views or policies of the Federal Highway Administration, the Federal Transit Administration, nor the collective membership of the New York Metropolitan Transportation Council (NYMTC). This report does not constitute a standard, specification, or regulation. Acceptance of this report as evidence of fulfillment, in part or whole, of the objectives of the planning study PTCS06T00.01 and PTCS05T00.01 does not constitute endorsement or approval of the need for any recommended improvement or additional study. It is being sponsored by the NYMTC for the benefit of its members and all interested stakeholders. Other legislation, regulation, executive order(s), official policy, and/or standard practice may supersede the recommendations or advice provided within. TECHNICAL REPORT STANDARD TITLE PAGE 1. Report No. 2. Government Accession No. 3. Recipient’s Catalog No. 4. Title and Subtitle 5. Report Date Pedestrian Safety in the NYMTC Region July 9, 2007 6. Performing Organization Code 7. -

LCDS Chapter 5 Junctions and Crossings
London Cycling Design Standards [Chapter 5] Junctions and crossings 5. Junctions and crossings This chapter provides design guidance on the use and 5.1 Junction design issues 01 adaptation of junctions and crossings to form safer, 5.1.1 User needs 01 coherent and comfortable cycling provision. 5.1. 2 Cycle-friendly interventions 02 5.1. 3 Junction analysis 03 5.1. 4 Corner radii 03 5.1. 5 Visibility splays 05 5.2 Crossings 06 5.2.1 Crossing types 06 5.2.2 National guidance on crossings 07 5.2.3 Selecting the crossing type 08 Except cycles 5.2.4 Crossings at signal-controlled junctions 08 5.2.5 Shared/Toucan crossings 11 5.2.6 Priority crossings 12 5.2.7 Mid-link cycle-only priority crossing 15 5.2.8 Uncontrolled crossings and refuge 15 ONE islands WAY 5.2.9 Informal crossings 18 5.2.10 Crossings of cycle lanes and tracks 18 Version control Version 1 (Dec 2014) – Published Version 2 (Sept 2016) – Minor amendments following publication of TSRGD (2016); minor updates to section on KEEP CLEAR low-level cycle signals and ASLs London Cycling Design Standards [Chapter 5] Contents 5. Junctions and crossings 5.3 Priority junctions 21 5.5 Roundabouts and gyratories 49 5.3.1 Cycle-friendly interventions 21 5.5.1 Cyclists’ use of roundabouts 49 5.3.2 Road user behaviour 21 5.5.2 Roundabout types 49 5.3.3 Cycle lanes at priority junctions 22 5.5.3 Normal roundabouts 50 5.3.4 Segregated lanes/tracks at priority 5.5.4 Mini-roundabouts 51 23 junctions 5.5.5 Compact and continental roundabouts 52 5.3.5 Cycling facilities across minor accesses 27 5.5.6 -

Making Streets Safe for Cycling
Making Streets Safe for Cycling OVERVIEW: currently done in the United States centers on Literature Review the installation of conventional bicycle lanes. A growing number of cities surveyed, however, have experienced successful installations of The following information is a contextual review innovative facilities in recent years. These of bicycle facility research and implementa- cities include Minneapolis, MN, Cambridge, tion guides, accompanied by a selective case MA, Portland, OR, Philadelphia, PA, and San study survey of innovative on-street cycling Francisco, CA. implementations in both the United States and abroad. This information is intended to serve Nationally implemented facility innovations can as a catalogue of ideas on which to base facility be grouped into three categories: (1) intersec- recommendations for local implementation. tion treatments, (2) improvements to standard- ized facilities and (3) new roadway accommoda- Existing Documents tions. Intersection treatments used to reduce confl icts between cyclists and turning vehicles As U.S. federal transportation policy increas- include advanced stop boxes and combination ingly supports the development of alternative turn lanes; improvements to standardized fa- transportation options, planning for bicycle fa- cilities include the use of pigmented lanes and cilities has emerged on federal, state and local improved road marking programs; new roadway levels. With its initial release in 1981and 1991 accommodations include bicycle/bus lanes, update, AASHTO’s Guide to the Development -

Traffic Impacts of Bicycle Facilities
Traffic Impacts of Bicycle Facilities Greg Lindsey, Principal Investigator Humphrey School of Public Affairs University of Minnesota June 2017 Research Project Final Report 2017-23 • mndot.gov/research To request this document in an alternative format, such as braille or large print, call 651-366-4718 or 1- 800-657-3774 (Greater Minnesota) or email your request to [email protected]. Please request at least one week in advance. Technical Report Documentation Page 1. Report No. 2. 3. Recipients Accession No. MN/RC 2017-23 4. Title and Subtitle 5. Report Date Traffic Impacts of Bicycle Facilities June 2017 6. 7. Author(s) 8. Performing Organization Report No. John Hourdos, Derek Lehrke, Melissa Duhn, Alireza Ermagun, Lila Singer-Berk, Greg Lindsey 9. Performing Organization Name and Address 10. Project/Task/Work Unit No. University of Minnesota CTS# 2015017 Humphrey School of Public Affairs 11. Contract (C) or Grant (G) No. th 301 19 Ave. S. (c) 99008 (wo) 144 Minneapolis, MN 55455 12. Sponsoring Organization Name and Address 13. Type of Report and Period Covered Minnesota Local Road Research Board Final Report Minnesota Department of Transportation 14. Sponsoring Agency Code Research Services & Library 395 John Ireland Boulevard, MS 330 St. Paul, Minnesota 55155-1899 15. Supplementary Notes http:// mndot.gov/research/reports/2017/201723.pdf 16. Abstract (Limit: 250 words) Engineers need information about interactions between vehicles and bicyclists to design efficient, safe transportation systems. This study involved a review of design guidelines for bicycle facilities, observation of bicycle-vehicle interactions at nine roadways with different types of bicycle facilities, analysis of results, and description of design implications.